sj
Изобретение относится к измериельной и испытательной технике и ожет быть использовано при регулиовании переменных нагрузок в цикических программных испытаниях процессе определения наделаюсти (т.е. ресурса) конструкции.
Целью изобретения является повыение точности системы.
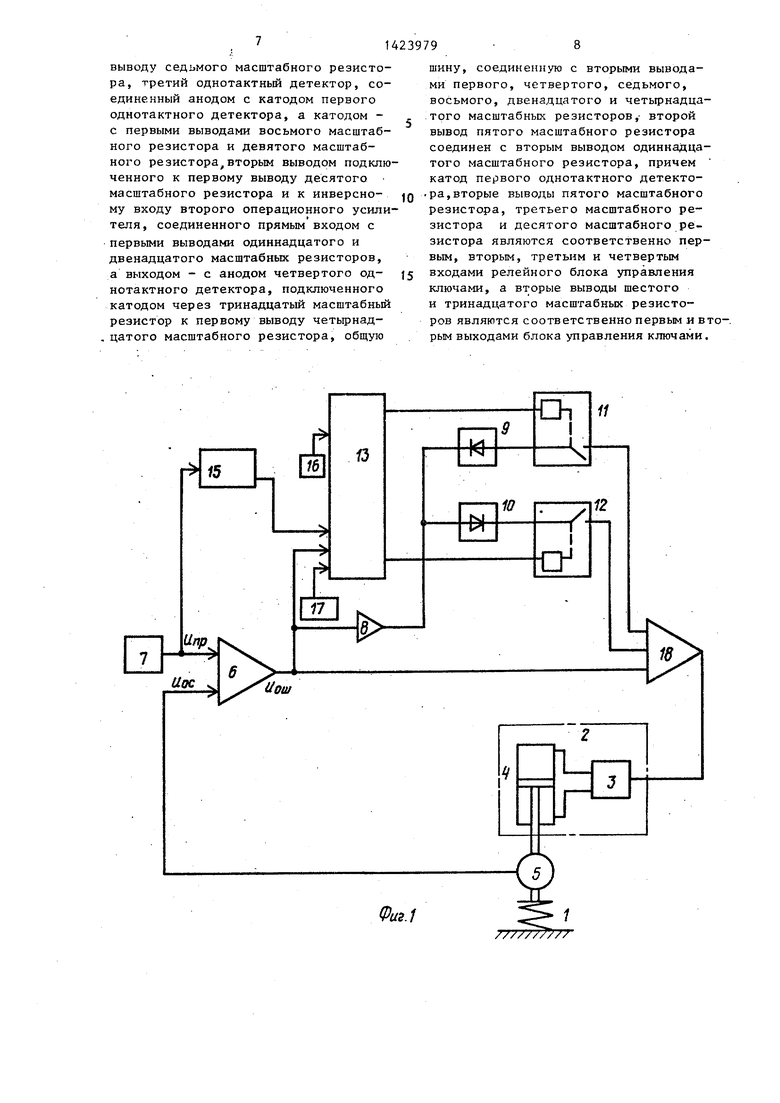
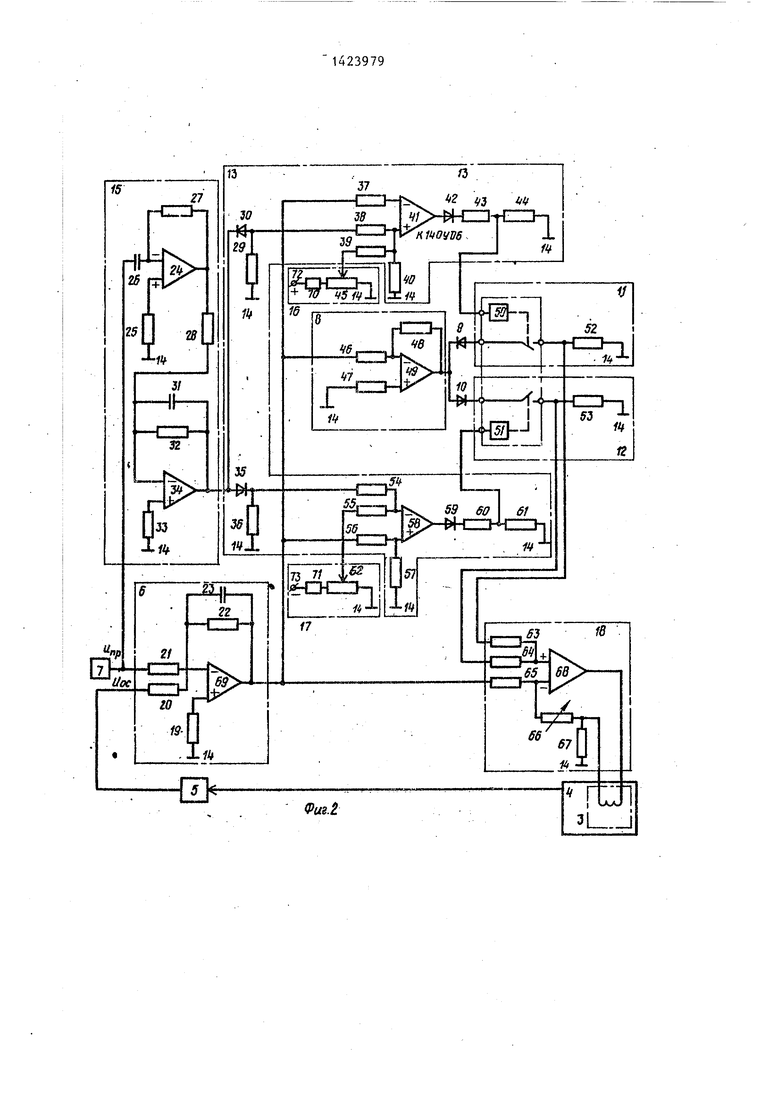
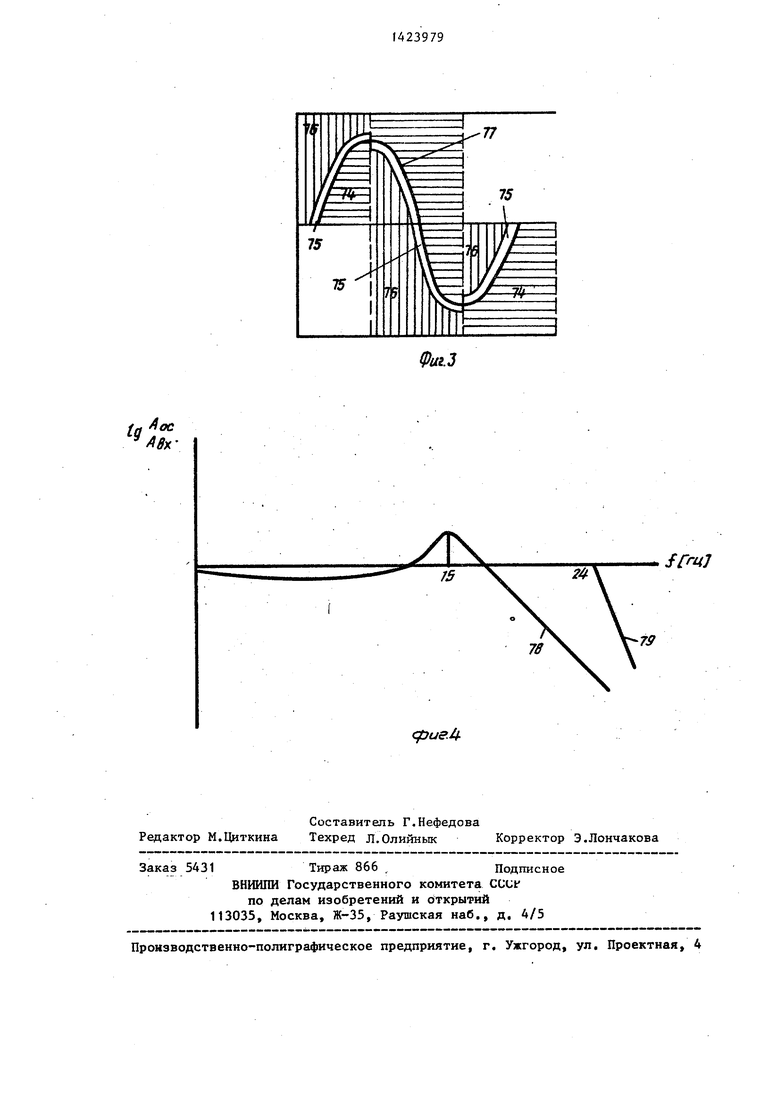
На фиг.1 приведена функциональая схема системы; на фиг.2 принипиальная электрическаш схема сис- Tehbi; на фиг.З - эпюра сигнала, поясняющая работу системы; на фиг,4 - мплитудно-частотные характеристики системы с ГОЩ-законом регулирования .
Система включает объект 1 регулирования (например, нагружаемая- конструкция) 1,исполнительный механизм (например, гидропривод) 2 электрогидравлический усилитель 3, гидроцилиндр 4, датчик 5 обратной связи (например, динамометр) измеритель 6 рассогласования, задатчик 7, усилитель 8, первый и второй детекторы 9,
10, первый и-второй ключи 11, 12, ре. лейный блок 13 управления ключами, общую шину 14, дифференциатор 15,иер вый и второй источники 16, 17 опорных сигналов, суммирующий усилитель 18 мощности, масштабные резисторы 19-22 интегрирующей ко1|денсатор 23} операционный усилитель 24,масштабный резистор 25, интегрирующий конденсатор 26, масштабные резисторы 27-29, однотактнын детектор 30,, интегрирую- 1ЧИЙ конденсатор 31, масштабные резне- торы 32,1 33, операционный ус 1литель 34, однотактный д етектор 35j масштабные резисторы 36-40, операционный усилитель 41,однотактный детектор 42 масштабные резисторы 43-48, операционный усилитель 49, обмотки 50, 51
управления электромагнитных реле, масштабные резисторы 52-57, операционный усилитель 58, однотактный детектор 59, масштабнь е резисторы 60 - 65, переменньш масштабный резистор (например, потенциометр) 66, масштабный резистор 67, операционные усилители 68, 69, масштабные резисторы 70, 71, клеммы 72, 73 источника постоянного напряжения.
На фиг.З и 4 обозначены зона 74, определяющая фазовое запаздывание системы, т.е. разрешенная зона, запрещенная зона 75, дополнительная .
15
25
30
35
40
45
50
55
разрешенная зона 7б для многоканаль- ных систем, сигнал задания 77, определяющий программу испытаний,амплитудно-частотные характеристики базового объекта и данн ой системы 78, 79; . - амплитуда сигнала обратной связи, А0 --амплитуда сигнала задания, f - частота, - напряжение на выходе задатчика 7, т..е. сигнал задания, напряжение на выходе датчика обратной связи, т.е. сигнал обратной связи, 11, напряжение на выходе измерителя рассогласования, т.е. сигнал рассогласования.
Интегрирующие конденсаторы 23 и 31 в измерителе 6 рассогласования н в дифференциаторе 15 предназначены только для фильтрации помех и не меняют функц1-1ональных характеристик указанных блоков.
Принцип работы системы заключается в сле дующем.
В процессе ресурсных испытаний конструкций 1 в соответствии с программой нагружения определяют зону фазового отставания сигнала обратной связи от сигнала задания во всем цикле нагружения и разрешают в разрешенной зоне 74 (фиг.З) увеличивать на 1-2 поря:дка коэффициент усиления прямого контура регулирова-ния системы. При этом чтобы исключить г - .
перерегулирование и возникновение автоколебаний, все остальные зоны объявляются запрещенными для увеличения коэффициента усиления. Для этого KOifTyp прохох д,ения сигнала рассогласования раздавливают на два параллельных канала. В первом канале вьще- ляют положительную составл-яющую про- . изводной от сигнала задания, допол- - нительно усиливают сигнал рассогласования, вьщеляют положительную и отрицательную его составляю цие с помощью детекторов 9, 10 и коммутируют составляющие в зависимости от величины положительной составляющей производной от сигнала задания и величины и знака сигнала рассогласования. Скоммутированный дополнительно, усгьтенный сигнач рассогласования суммируют с сигналом рассогласования во втором канале, который постоянно работает с апериодическим законом регулирования. При работе в многоканальных системах управления для устранения взаимовлияния канала на канал и ;
повьшения точности регулирования дополнительно усиленный сигнал рассогласования дополнительно коммутируют .по.величине допуска взаимовлияния системы в запрещенной зоне, В случае подхода сигнала обратной связи к запрещенной зоне 35 усиленный сигнал плавно уменьшается до нуля и дальше работает только второй канал сигнала рассогласования прямого контура регулирования системы с апериодическим законом регулирования,ко- торьй всегда устойчив. Если при рабо
2 с датчика (динамометра) 5 снимается сигнал обратной связи, который меньше сигнала задания. На выходе измерителя 6 рассогласования появляется отрицательный сигнал ошибки. Перед этим блок 13 управления ключами выделяет в своем нижнем канале положительный сигнал, который больше выходного сигнала источника 17 опорного сигнала, и открывает ключ 12.
Отрицательный сигнал рассогласования поступает на вход усилителя 8, в котором инвертируется и усиливает
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1986 |
|
SU1472871A1 |
| Устройство для контроля деградации МДП-структур | 1990 |
|
SU1783454A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Интегральный регулятор | 1982 |
|
SU1297007A1 |
| Устройство для определения характеристик операционных усилителей | 1981 |
|
SU985797A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Многоканальный регулятор | 1988 |
|
SU1564586A1 |
| Скважинный гамма-спектрометр | 1982 |
|
SU1082154A1 |
Изобретение относится к области измерительной и испытательной техники и моЖет быть использовано при регулировании переменных нагрузок в циклических-программных испытаниях в процессе определения надежности (т.е. ресурса) конструкции. Целью из.обретения является повьшение точности системы. Поставленная цель достигается за счет того, что в контур регулирования дополнительно подается положительная (или отрицательная) составляющая сигнала рассогласования, умноженная на коэффициент усиления, порядок которого равен порядку основного канала регулирования, Эти дополнительные сигналы коммутируются в зависимости от величины положительной (или отрицатель- йой) составляющей, производной от сигнала задания, величины сигнала рассогласования и величины постоянного опорного сигнала. 1 з.п. ф-лы, 4 ил.
те в многоканальной системе какой-ли- 15 ся в 50 раз. Полученный сигнал про
бо канал или группа каналов выведет сигнал обратной связи в запрещенной зоне за установленный допуск, то усиленный сигнал рассогласования скоммутируется и вернет его снова в коридор допуска, который не меняет фазового запаздывания. При этом усиленный сиГнал рассогласования отключится .
Рассмотрим первую четверть сину соидальн ого сигнала задания 77 (фиг.З), когда нагрузка возрастает.
Как правило, сигнал обратной связи в системе отстает от сигнала задания. Это отставание характеризует точность работы системы как по амплитуде, так и по фазе. При .увеличении коэффициента усиления контура регулирования системы уменьшается величина ошибки, а следовательно,увеличивается точность системы. Однако увеличение коэффициента усиления имеет определенные пределы, связанные с возникновением режима автоколебаний и потерей устойчивости системы. Вместе с тем автоколебания могут начаться только после перерегулирования, когда сигнал обратной связи превысит сигнал задания. Исключение перерегулирования исключает условия возникно вения автоколебаний.
В исходном состоянии системы ЛФИГ.1) ключи 11 и 12 открыты. Источники 16 и 17 опорных сигналов, определяющие величину допуска,формируют опорные сигналы, соответствующие величине допуска или ширине запрещенной зоны 75. В результате этого на выходах, блока 13 управления ключами появляется положительный сигнал, который закрывает ключи 11 и 12. Система готова к работе.
В процессе нагуржения объекта регулирования 1 с помощью гидропривода
5
5
О g
0
0
5
ходит через детектор 10, ключ 12 на третий вход усилителя 18 мощности, в котором суммируется с сигналом рассогласования и с выхода которого поступает на обмотку управленияэлектрогидравлического усилителя 3, который увеличивает скорость хода штока гидроцилиндра 4. При подходе величины сигнала обратной связи к вели- чине сигнала задания уменьшаются выходные сигналы измерителя 6 рассогла- сования и усилителя 8 и сигнал, проходящий через детектор 10, плавно уменьшается до нуля. Всегда подключенный нижний канал сигнала рассогласования вместе с исполнительным механизмом 2 настроен на апериодический закон регулирования, который всегда устойчив и не дает перерегулирования.
Таким образом,, если нижний канал сигнала рассогласования имел коэффициент усиления по тракту 30, то система в зоне фазового запаздывания работает в диапазоне коэффициента усиления 30-1500 без автоколебаний.
Если : по каким-то причинам сигнал .обратной связи больше сигнала за- .Дания, то на выходе усилителя 8 появляется усиленный сигнал рассогласования отрицательной полярности, который не пропускает через ключ 12 однотактный детектор 10, а ключ 11 закрыт. Б этом случае работает только нижний канал сигнала рассогласования, который уменьшает сигнал обратной связи.
Если в многоканальной системе другие кансшы нагружения, связанные с первым каналом через испытуемую конструкцию, резко выведут сигнал обратной связи выше сигнала- за,цания за коридор допуска, определяемый источником 16 опорного сигнала, то величина сигнала рассогласования после уси-
лителя 6 будет больше сигнала источ- ника 16 опорного сигнала. При этом операционный усилитель 4 в блоке 13 управления ютючами, работающий в режиме, насыщения, открывает ключ 11, и отрицательный сигнал с выхода усилителя 8 через детектор 9 поступает на второй вход усилителя 18 мощно- : сти и возвращает сигнал обратной связи назад D коридор. При этом вновь I закрывается ключ 11. I При уменьшении сигнала задания 77 во второй и третьей четверти синусоиды (фиг.3) открывается ключ 11 и так далее. Форма нагружения при этом может быть не обязательно синусоидальной.
Вьщеление зон фазового запаздывания и увеличение в них коэффициента усиления канала регулирования системы с 30 до 1500 позволяет на столько же повысить точность регулирова- Iния.
Для исследования частотных харак- 1 та ристик системы использовали имею- I щийся гидропривод с гид ростатнчески- j ми подшипниками с развиваемым усили- iем 60 кН при перемещении штока поршня ±2,5 мм и с пропускной способно- :стью ЭГУ 60 л/мин.
, На фиг.4 приведены амплитудно- частотные характеристики системы с оптимально настроенным ПИД-регуля- тором (кривая 78) и. с предложенным самонастраивающимся регулятором I(кривая 79).
Как видно из приведенных графи- |ков, адаптивная система имеет боль- 1Шую точность по сравнению с первой системой не только до пределов насыщения гидропривода, но и расш1ряет этот предел в 1,5 раза.
Большой коэффициент усилителя 8 в верхнем канале,преобразования сигнала рассогласования эквивалентен дополнительному включению в систему источника постоянного напряжения, выходной сигнал которого подается в систему скачком со знаком, равным знаку сигнала рассогласования, потому что в этом случае реализуется релейный элемент с беконечно болышш коэффициентом усиления, который приводит к расширению зоны насьпцения исполнительного механизма. I
Таким образом, использование изобретения позволяет не только повысить точность нагружения во всем
5
0
5
0
5
0
5
0
5
спектре исследуемых частот до насы- . щения гидропривода, но и расширить этот предел. Если использовать более быстродействующий гидропривод, можно обеспечить адаптивное управление до частот значительновыше 100 Гц.
Формула изобретения
выводу седьмого масштабного резистора, третий однотактный детектор, соединенный анодом с катодом первого однотактного детектора, а катодом - с первыми выводами восьмого масштабного резистора и девятого масштабного резистора,вторым выводом подключенного к первому выводу десятого масштабного резистора и к инверсно- му входу второго операционного усилителя, соединенного прямым входом с первыми выводами одиннадцатого и двенадцатого масштабных резисторов, а выходом - с анодом четвертого од- нотактного детектора, подключенного катодом через тринадцатый масштабный резистор к первому выводу четьфнад- цатого масштабного резистора, общую
шину, соединенную с вторыми выводами первого, четвертого, седьмого, восьмого, двенадцатого и четырнадцатого масштабных резисторов,- второй вывод пятого масштабного резистора соединен с вторым выводом одиннадцатого масштабного резистора, причем катод первого однотактного детекто- ра,вторые выводы пятого масштабного резистора, третьего масштабного резистора и десятого масштабного резистора являются соответственно первым, вторым, третьим и четвертым входами релейного блока управления ключами, а вторые выводы шестого и тринадцатого масштабных резисторов являются соответственно первым и врым выходами блока управления ключами.
АВх-
7В
сриеЛ
| Система с переменной структурой | 1974 |
|
SU723507A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система управления | 1984 |
|
SU1205127A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
