Изобретение относится к электротехнике, в частности к электроприводам постоян- ного тока механизмов, создающих натяжение полосы в петлевых накопителях горизонтального или вертикального типа, которые широко применяются для обеспечения непрерывного технологического процесса на агрегатах непрерывной обработки полосы таких, как агрегаты непрерывного отжига, лужения, цинкования, травления, а также на станах бесконечной холодной прокатки в листопрокатных цехах, и является усовершенствованием устройства по авт. св. № 809077.
Известно устройство для управления электроприводом накопителя полосы, в котором улучшена схема компенсации динамического момента привода в переходных режимах путем подключения входов дифференцирующего усилителя к выходам блоков задания уставки скоростей электроприводов входных и выходных тянущих роликов вместо подключения упомянутых входов к тахогенераторам входных и выходных тянущих роликов. При этом повышается надежность управления накопителем полосы в динамических режимах.
Однако наличие связи между тележкой и лебедкой через канат существенно влияет на физику переходных процессов рассматриваемых механизмов. Так, при разгоне тележки в направлении к лебедке привод лебедки обеспечивает разгон всех элементов привода, а также разгон тележки и полосы в накопителе, в то время, как при разгоне тележки в направлени от лебедки ускорение тележки и полосы в накопителе не может быть выполнено приводом лебедки и выполняется приводом тя,нущих роликов. Соответственно торможение тележки при движении ее к лебедке выполняет привод тянущих роликов, а торможение тележки при движении от лебедки выполняется приводом лебедки путем воздействия через канат.
Таким образом, суммарная величина массы тел, которым передается или у которых отбирается приводом лебедки энергия во время переходных процессов не является постоянной, а зависит в общем случае от знака производной скорости привода лебедки. Применительно к понятиям электропривода это означает, что привод лебедки работаете переменным моментом инерции, зависящим от знака его ускорения (замедления).
Кроме этого, часть величины момента инерции привода лебедки, представляющая собой момент инерции полосы, находящейся в накопителе, зависит от массы этой
полосы, которая определяется поперечным сечением полосы и местом нахождения тележки в накопителе.
Из изложенного следует, что приведен- 5 ный момент инерции привода лебедки состоит из суммы моментов инерции двигателя, лебедки, тележки и полосы в накопителе, если происходит разгон тележки в направлении к лебедке или происходит
0 торможение тележки в направлении от лебедки (назовем это режимом I), а если происходит разгон тележки в направлении от лебедки или происходит торможение тележки в направлении к лебедке, то приве5 денный момент инерции привода лебедки состоит из суммы моментов инерции двигателя и лебедки (назовем это режимом II).
Отсутствие учета вышеизложенного в известном устройстве снижает точность
0 поддержания натяжения в динамических режимах работы накопителя. Это приводит к существенным изменениям натяжения, вплоть до полного исчезновения, что сопровождается хлопаньем ветвей полосы друг
5 о друга с последующими рывками и т.п., что снижает надежность работы оборудования и влияет на его производительность.
Целью изобретения является повышение точности регулирования натяжения по0 лосы в накопителе в динамических режимах.
Цель достигается тем, что в устройство введены дискриминатор знака, три блока умножения, датчик положения тележки на5 копителя, измерители толщины и ширины полосы, причем входдискриминатора знака соединен с выходом дифференцирующего усилителя, а выход подключен к первому входу первого блока умножения и к первому
0 корректирующему входу регулятора тока электродвигателя барабана лебедки, второй корректирующий вход которого соединен с выходом первого блока умножения, выходы измерителей толщины и ширины полосы
5 подключены к входам третьего блока умножения, выходом соединенного с одним входом второго блока умножения, другим входом соединенного с выходом датчика положения тележки накопителя, а выходом 0 с вторым входом первого блока умножения. Введение в устройство данных блоков позволяет более точно определить момент инерции полосы, являющийся составной частью момента инерции привода лебедки в
5 режиме 1, а с помощью дискриминатора знака сигнала при работе тележки накопителя в режиме I или II можно изменять совокупность составляющих момента инерции привода лебедки в зависимости от знака производной скорости привода лебедки.
При этом обеспечивается более точное определение динамического момента привода лебедки для его компенсации во время переходных процессов разгона и торможения, что, в свою очередь, повышает точность ре- гулирования натяжения полосы в накопителе при разгоне и торможении.
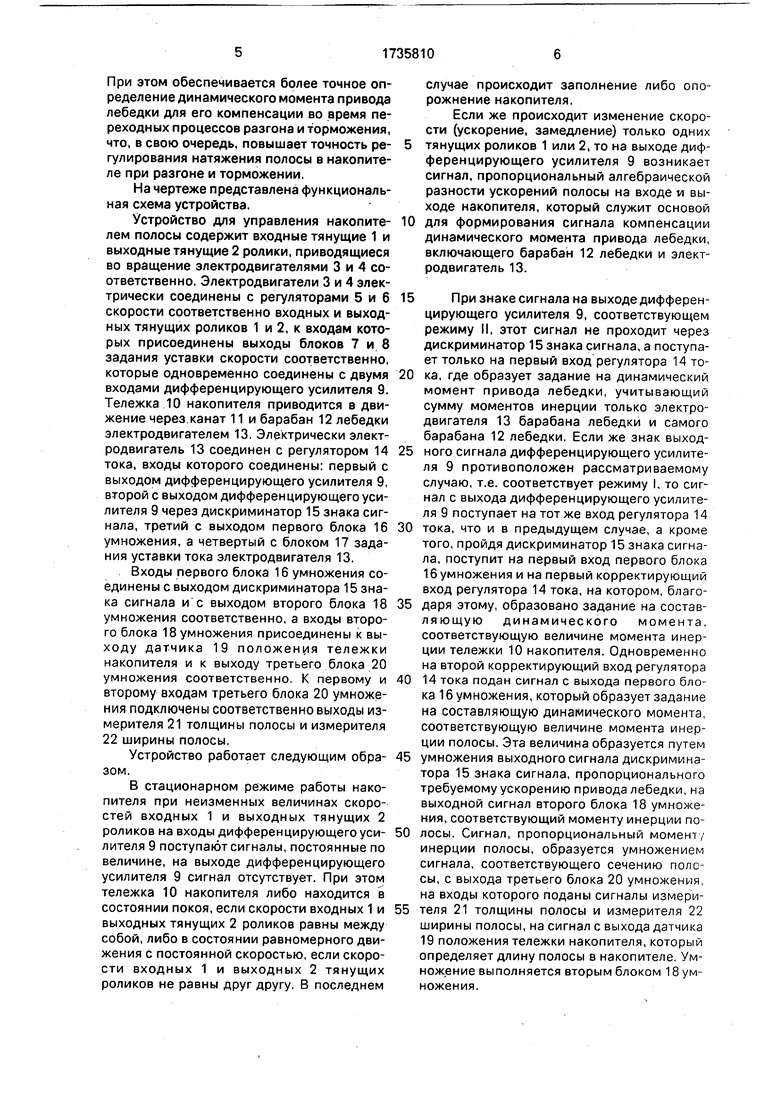
На чертеже представлена функциональная схема устройства.
Устройство для управления накопите- лем полосы содержит входные тянущие 1 и выходные тянущие 2 ролики, приводящиеся во вращение электродвигателями 3 и 4 соответственно. Электродвигатели 3 и 4 электрически соединены с регуляторами 5 и 6 скорости соответственно входных и выходных тянущих роликов 1 и 2, к входам которых присоединены выходы блоков 7 и 8 задания уставки скорости соответственно, которые одновременно соединены с двумя входами дифференцирующего усилителя 9. Тележка 10 накопителя приводится в движение через, канат 11 и барабан 12 лебедки электродвигателем 13. Электрически электродвигатель 13 соединен с регулятором 14 тока, входы которого соединены: первый с выходом дифференцирующего усилителя 9, второй с выходом дифференцирующего усилителя 9 через дискриминатор 15 знака сигнала, третий с выходом первого блока 16 умножения, а четвертый с блоком 17 задания уставки тока электродвигателя 13.
Входы первого блока 16 умножения соединены с выходом дискриминатора 15 знака сигнала и с выходом второго блока 18 умножения соответственно, а входы второго блока 18 умножения присоединены к выходу датчика 19 положения тележки накопителя и к выходу третьего блока 20 умножения соответственно. К первому и второму входам третьего блока 20 умножения подключены соответственно выходы измерителя 21 толщины полосы и измерителя 22 ширины полосы.
Устройство работает следующим обра- зом.
В стационарном режиме работы накопителя при неизменных величинах скоростей входных 1 и выходных тянущих 2 роликов на входы дифференцирующего уси- лителя 9 поступают сигналы, постоянные по величине, на выходе дифференцирующего усилителя 9 сигнал отсутствует. При этом тележка 10 накопителя либо находится в состоянии покоя, если скорости входных 1 и выходных тянущих 2 роликов равны между собой, либо в состоянии равномерного движения с постоянной скоростью, если скорости входных 1 и выходных 2 тянущих роликов не равны друг другу. В последнем
случае происходит заполнение либо опорожнение накопителя.
Если же происходит изменение скорости (ускорение, замедление) только одних тянущих роликов 1 или 2, то на выходе дифференцирующего усилителя 9 возникает сигнал, пропорциональный алгебраической разности ускорений полосы на входе и выходе накопителя, который служит основой для формирования сигнала компенсации динамического момента привода лебедки, включающего барабан 12 лебедки и электродвигатель 13.
При знаке сигнала на выходе дифференцирующего усилителя 9, соответствующем режиму И, этот сигнал не проходит через дискриминатор 15 знака сигнала, а поступает только на первый вход регулятора 14 тока, где образует задание на динамический момент привода лебедки, учитывающий сумму моментов инерции только электродвигателя 13 барабана лебедки и самого барабана 12 лебедки, Если же знак выходного сигнала дифференцирующего усилителя 9 противоположен рассматриваемому случаю, т.е. соответствует режиму I, то сигнал с выхода дифференцирующего усилителя 9 поступает на тот же вход регулятора 14 тока, что и в предыдущем случае, а кроме того, пройдя дискриминатор 15 знака сигнала, поступит на первый вход первого блока 16 умножения и на первый корректирующий вход регулятора 14 тока, на котором, благодаря этому, образовано задание на состав- ляющую динамического момента, соответствующую величине момента инерции тележки 10 накопителя. Одновременно на второй корректирующий вход регулятора 14 тока подан сигнал с выхода первого блока 16 умножения, который образует задание на составляющую динамического момента, соответствующую величине момента инерции полосы. Эта величина образуется путем умножения выходного сигнала дискриминатора 15 знака сигнала, пропорционального требуемому ускорению привода лебедки, на выходной сигнал второго блока 18 умножения, соответствующий моменту инерции полосы. Сигнал, пропорциональный момент/ инерции полосы, образуется умножением сигнала, соответствующего сечению полосы, с выхода третьего блока 20 умножения, на входы которого поданы сигналы измерителя 21 толщины полосы и измерителя 22 ширины полосы, на сигнал с выхода датчика 19 положения тележки накопителя, который определяет длину полосы в накопителе. Умножение выполняется вторым блоком 18 умножения.
В качестве сигнала измерителя ширины может быть использован сигнал устройства, непосредственно измеряющего ширину на базе фотодатчиков, либо от АСУ ТП, либо сигнал, вводимый вручную оператором.
Датчик положения тележки накопителя может быть выполнен в виде путевого выключателя, командоаппарата либо сельсина - датчика.
В качестве дискриминатора знака сигнала может быть использовано полупроводниковое устройство выпрямления сигнала, например в самом простом варианте, диод.
Таким образом, на трех входах регулятора 14 тока, имеющих индивидуальные коэффициенты передачи, формируется суммарный сигнал задания динамического момента, соответствующего в рассматриваемом режиме моменту инерции привода лебедки.
Из вышеизложенного видно, что предлагаемое устройство позволяет повысить точность определения величины динамического момента привода лебедки накопителя полосы и тем самым повысить точность поддержания натяжения полосы в накопителе в режимах разгона и торможения тележки. Это улучшит условия работы оборудования накопителя благодаря уменьшению рывков, хлопанья полосы и т.п., что повысит надежность и долговечность оборудования, а
также позволит повысить величины ускорения и замедления полосы на входе и выходе накопителя, что в конечном счете приведет к увеличению производительности агрегата и сокращению простоев.
Формула изобретения Устройство для управления накопителем полосы по авт. св. № 809077, о т л и ч ающееся тем, что, с целью повышения точности регулирования натяжения полосы в накопителе в динамических режимах, в него введены дискриминатор знака, три блока умножения, датчик положения тележки накопителя, измерители толщины и ширины полосы, причем вход дискриминатора знака соединен с выходом дифференцирующего усилителя, а выход подключен к первому входу первого блока умножения и к
первому корректирующему входу регулятора тока электродвигателя барабана лебедки, второй корректирующий вход которого соединен с выходом первого блока умножения, выходы измерителей толщины и ширины полосы подключены к входам третьего блока умножения, выходом соединенного с одним входом второго блока умножения, другим входом соединенного с выходом датчика положения тележки накопителя, а выходом - с вторым входом первого блока умножения.

Изобретение относится к электротехнике, в частности к электроприводам постоянного тока механизмов, создающих натяжение полосы в петлевых накопителях, которые широко применяются для обеспечения непрерывного технологического процесса на агрегатах непрерывной обработки полосы, а также на станах бесконечной холодной прокатки в листопрокатных цехах. / Целью изобретения является повышение точности регулирования натяжения полосы в накопителе в динамических режимах. Устройство содержит входные (1) и выходные (2) тянущие ролики с электродвигателями (3, 4), регуляторами скорости (5, 6) и блоками задания уставки скорости (7,8), лебедку с электродвигателем (12), регулятор тока (14) и блок задания уставки тока (17) и дифференцирующий усилитель (9), а также три блока умножения (16, 18, 20), датчик положения 
| Устройство для управления накопите-лЕМ пОлОСы | 1978 |
|
SU809077A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
