11
Изобретение относится к дерево-- обрабатывающей промьшшенности и : может быть применено в станках с числовым программным управлением.
.Цель изобретения - упрощение кон- струкции и повьшение точности позиционирования .
На фиг.1 показана принципиальная гидрокинематическая схема устройства; на фиг.2 - диаграмма изменения скорости в процессе позиционирования; на фиг.З - структурная схема устройства;.на фиг.4 - лринципиаль- ная электрическая схема.
Перемещение рабочего органа ,(суп- порта) 1 по направляющим 2 осу1цест- вляется исполнительным механизмом (гидроцилиндром) 3 (фиг.I).
Контроль величины леремещений с индикацией текущей координаты на па- нели индикации производится с по- у мощью бесконтактного датчика положения рабочего органа (сельсина) 4, установленного соосно с винтом 5 обратимого винтового механизма обрат- ной связи. Гайка 6 винтового механизма закреплена в суппорте 1, а винт 5 смонтирован в радиальноупорных шарикоподшипниках 7 неподвижно в осевом направлении. При поступательном перемещении суппорта с гайкой винт 5 поворачивается в шарикоподшипниках: перемещению на шаг резьбы S соответствует один полный оборот винта 5 и связанного с ним посредством беззазорной муфты 8 ротора сельсина 4.
Для исключения зазоров в винтовом механизме обратной связи гайка 6 выполняется из двух полугаек, одна из которых имеет возможность осевой регулировки.
Гидросистема устройства питается от насоса 9 постоянной производительности.
Для управления направлением перемещения и остановкой в заданном положении в напорной линии установлен трехпозиционный реверсивный гидрораспределитель 10 с электромагнитами Эм 1 и Эм 2. Когда оба электромагнит обесточены, плунжер гидрораспределителя занимает среднее ( нейтральное) положение и отсекает полости цилиндра 3, фиксируя положение поршня.
С целью повьщ1ения точности установки на размер и быстродейстззия гидросистема вьшолнена трехскоростнойу с автоматическим переключением по
5
o 5
0
5
0
5
5
ЗА2
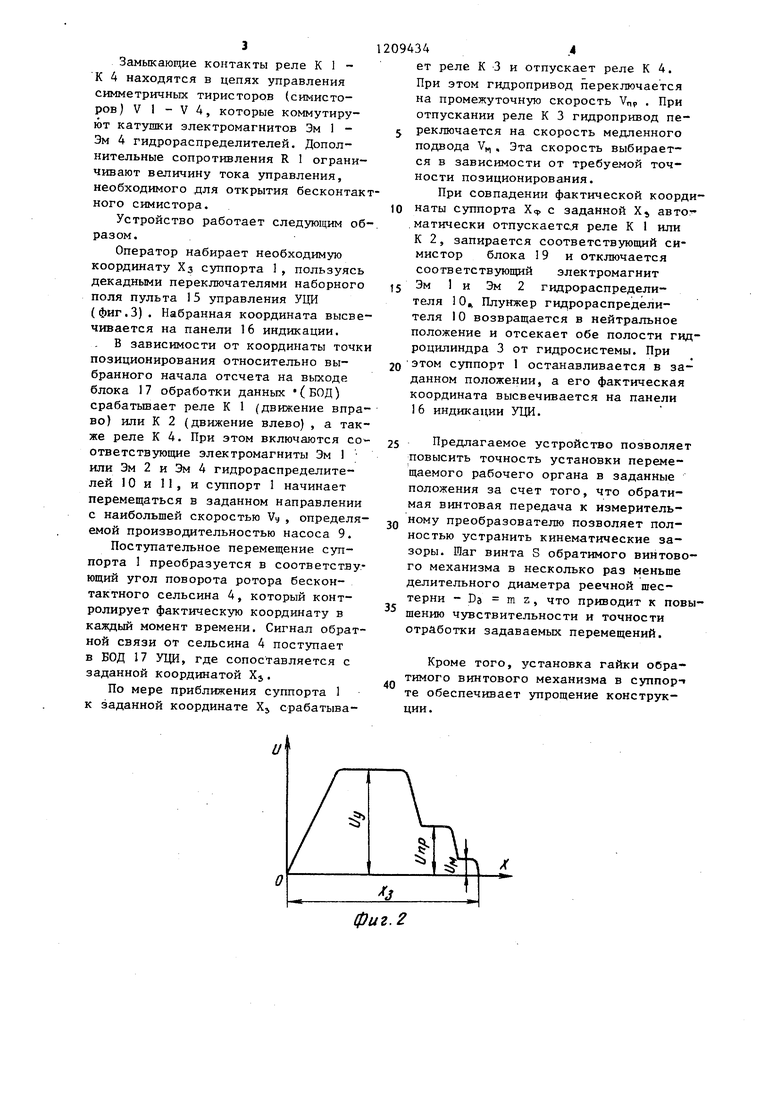
мере приближения к заданной координате, сначала на промежуточную , а затем на установочную скорость медленного подвода VH (фиг.2). Для этого в сливную линию установлены трехпозиционный гидрораспределитель 11 с электромагнитами Эм 3 и Эм 4 и два регулятора 12 и 13 потока.
При включении электромагнита Эм 4 (при обесточенном Эм 3) масло поступает на слив по открытой линии 14 и суппорт 1 перемещается с наибольшей скоростью Vy , определяемой производительностью насоса 9.
При включении электромагнита Эм 3 (при обесточенном Эм 4j сливная линия соединяется с баком через оба регулятора 12 и 13 потока, что обеспечивает перемещение суппорта 1 на промежуточной скорости Vnp.
При обесточенных электромагнитах Эм 3 и Эм 4 плунжер гидрораспределителя I1 занимает среднее (нейтральное) положение. В результате масло поступает на слив только через регулятор 13 потока, настроенный на скорость медленного подвода VM.
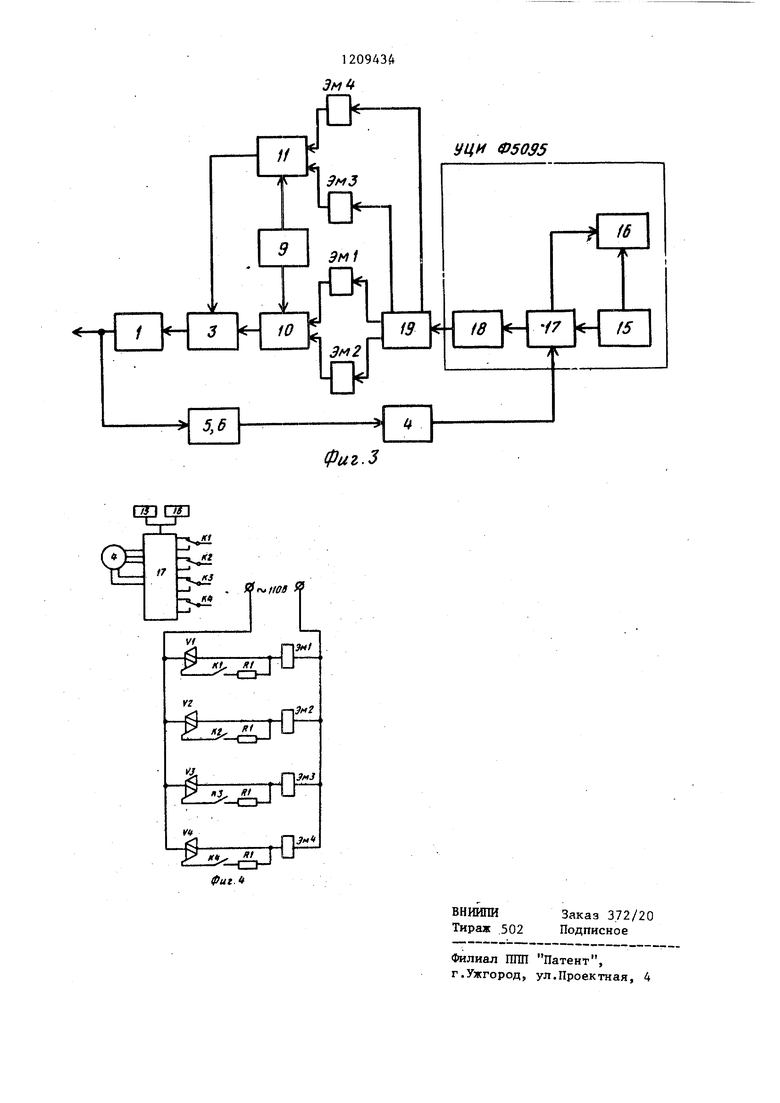
Стр тстурная схема устройства {фиг.З) включает в себя устройство цифровой индикации (УПИ), состоящее из пульта 15 преднабора координат
с декадными переключателями, пане- - ли 16 индикации на газоразрядных
лампах, блока 17 обработки данных и блока 18 выходных реле, блока 19 тиристорных усилителей-симисторов , коммутирующих электромагниты Эм 1 - Эм 4 трехпозиционных гидрораспределителей 10 и 11, управляющих направ-- лением и скоростью перемещения гидроцилиндра 3. Величина перемещения суппорта 1 контролируется бесконтактным сельсином 4 посредством обратимого винтового механизма 5, 6 обратной связи. Сигнал от сельсина по каналу обратной связи поступает в блок 17 обработки данных БОД) УЦИ.
Принципиальная электрическая схема устройства (фиг.4) управляет элек тромагнитами Эм I - Эм 4 трех - позиционных гидрораспределителей 10 и 11 (фиг.) с помощью контактов слаботочных реле К 1 - К 14 блока 18 выходных реле устройства цифровой индикации (УЦИ). УЦИ состоит из блока 17 обработки данных (БОД), к ко-. торому подключен бесконтактный сельсин 4, пульта 15 преднабора координат и панели 16 индикации.
3
Замыкающие контакты реле К 1 - К 4 находятся в цепях управления симметричных тиристоров (симисто- ров) V 1 - V 4, которые коммутируют катушки электромагнитов Эм 1 - Эм А гидрораспределителей. Дополнительные сопротивления R 1 ограничивают величину тока управления, необходимого для открытия бесконтактного симистора.
Устройство работает следующим образом.
Оператор набирает необходимую координату Хз суппорта 1, пользуясь декадными переключателями наборного поля пульта 15 управления УЦИ (фиг.З). Набранная координата высвечивается на панели 16 индикации.
В зависимости от координаты точки позиционирования относительно выбранного начала отсчета на выходе блока 17 обработки данных (БОД) срабатьшает реле К 1 (движение вправо) или К 2 (движение влево) , а также реле К 4. При этом включаются со ответствующие электромагниты Эм 1 ; или Эм 2 и Эм 4 гидрораспределителей 10 и 11, и суппорт I начинает перемещаться в заданном направлении с наибольшей скоростью Vo , определяемой производительностью насоса 9.
Поступательное перемещение суппорта 1 преобразуется в соответствующий угол поворота ротора бесконтактного сельсина 4, который контролирует фактическую координату в каждый момент времени. Сигнал обратной связи от сельсина 4 поступает в БОД 17 УЦИ, где сопоставляется с заданной координатой Xj.
По мере приближения суппорта 1 к заданной координате Xj срабатыва10
094344
ет реле К 3 и отпускает реле К 4. При этом гидропривод переключается на промежуточную скорость Vnp . При отпускании реле К 3 гидропривод пе- 5 реключается на скорость медленного подвода V, Эта скорость выбирается в зависимости от требуемой точности позиционирования.
При совпадении фактической координаты суппорта Хф с заданной Х автог- матически отпускаетс я реле К 1 или К 2, запирается соответствующий си- мистор блока 19 и отключается соответствующий электромагнит Эм 1 и Эм 2 гидрораспределителя 10 Плунжер гидрораспределителя 10 возвращается в нейтральное положение и отсекает обе полости гидроцилиндра 3 от гидросистемы. При этом суппорт 1 останавливается в заданном положении, а его фактическая координата высвечивается на панели 16 индикации УЦИ.
15
20
Предлагаемое устройство позволяет повысить точность установки перемещаемого рабочего органа в заданные положения за счет того, что обратимая винтовая передача к измерительному преобразователю позволяет полностью устранить кинематические зазоры. Шаг винта S обратимого винтового механизма в несколько раз меньше делительного диаметра реечной шестерни - Da m Z, что приводит к повышению чувствительности и точности отработки задаваемых перемещений.
Кроме того, установка гайки обратимого винтового механизма в cynnop-t те обеспечивает упрощение конструкции.
фиг. г
фиг.З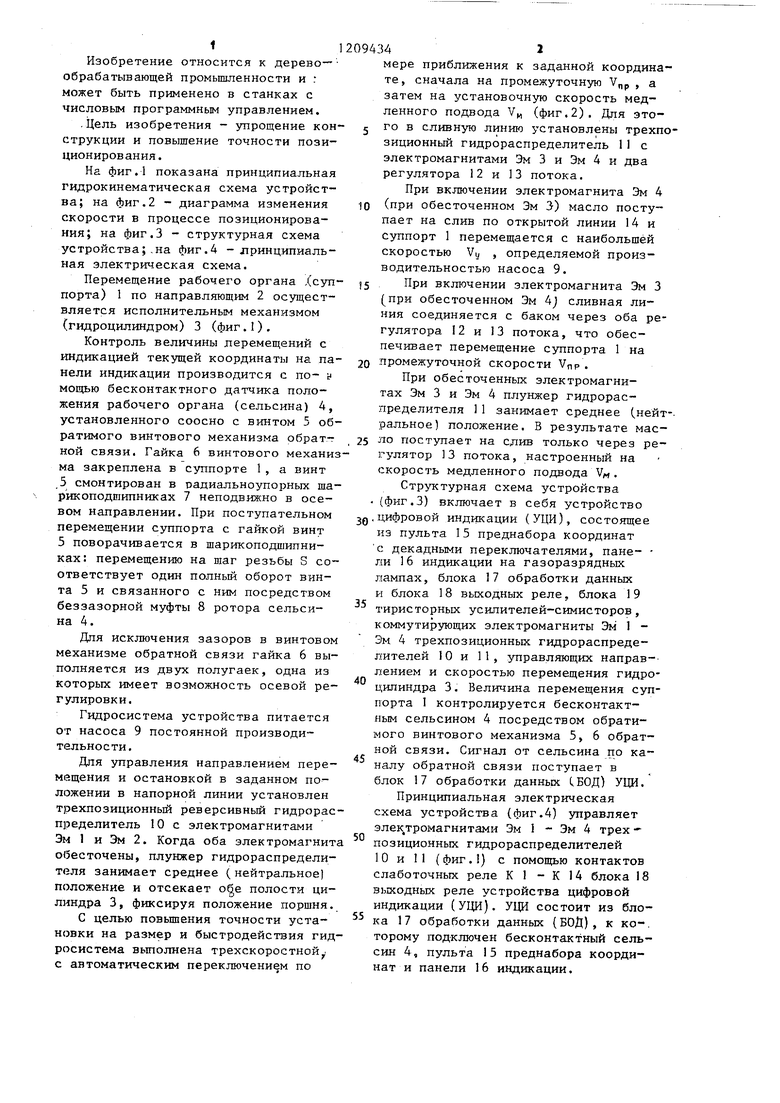

17
tfi j(t
el/ Л4
Kfr ffffa
41
Kt Kt
€
лм/
/
%,
-й } -fezgrO
««
ВНИИПИ Заказ 3.72/20 Тираж 502 Подписное
Филиал ППП Патент, г.Ужгород, ул.Проектная, 4
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 0 |
|
SU307897A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Кузнецов В.М | |||
| Автоматизация установочных перемещений в деревообраба- тьюающих станках, М.: Лесная промьш- ленность | |||
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
