«
Изобретение относится к способа - управления приводами цикловогоj преимущественно подъемно-транспортного, оборудования и может использоваться в различных приводах3 осу- ществляющих большое число пусков и работающих в условиях изменения статического момента и момента инерции в широких пределах.
Цель изобретения - увеличение производительности за счет уменьше ния времени цикла работы.
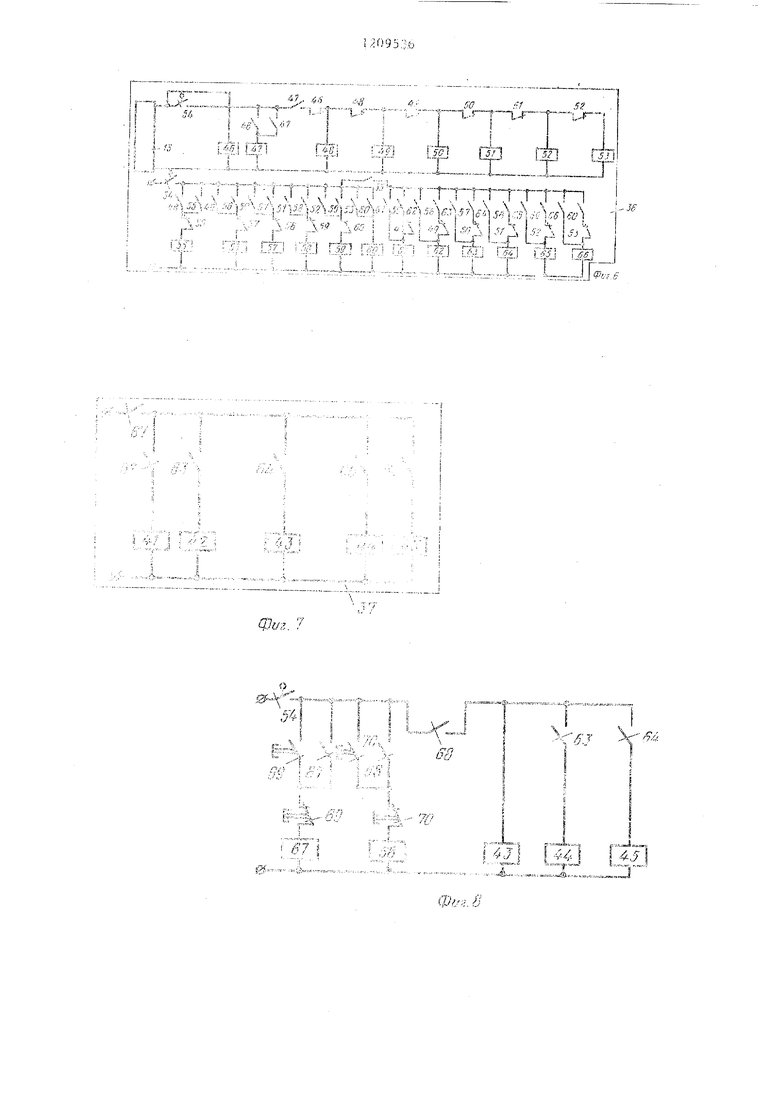
На фиг. 1 изображены.механизм подачи с прижимаемыми,к поверхности хлыста приводными роликами, а также приемный стол с силовыми упорами; на фиг, 2 - подающий механизм с прижимным роликомJ на фиг, 3 механизм подачи, снабженный допол™ нительной приводной рябухойj на фиг, 4 и 5 схемы управления одн двигательными приводами применительно к раскряжевочной установкеj на фиг, 6-8 - варианты блоков и схем
системы управления приводами соглас- 25 27,j дистанционно управляемую муфту
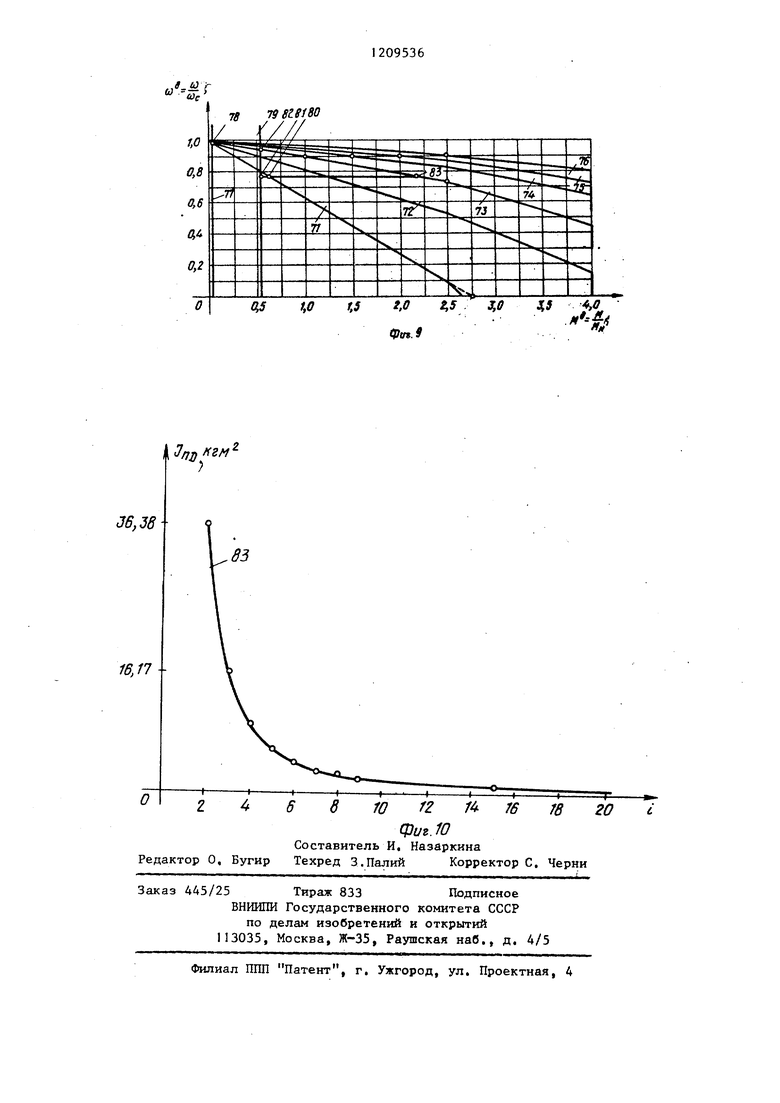
но предлагаемому способу на фиг, 9 - механические характеристики одд-юдви - гательного привода применительно к использованию его на раскряжевочной установке; на фиг, 10 - график зависимости момента инерции поступатель- нодвижугц1хся масс подающего механизма и хлыста средней массы от передаточного отношения привода.
Устройство для реализации процессов управления приводами циклового оборудования для перемещения, напри мер, лесоматериалов (фиг, 1) содер-- жит направляюищй лоток 1, приводные
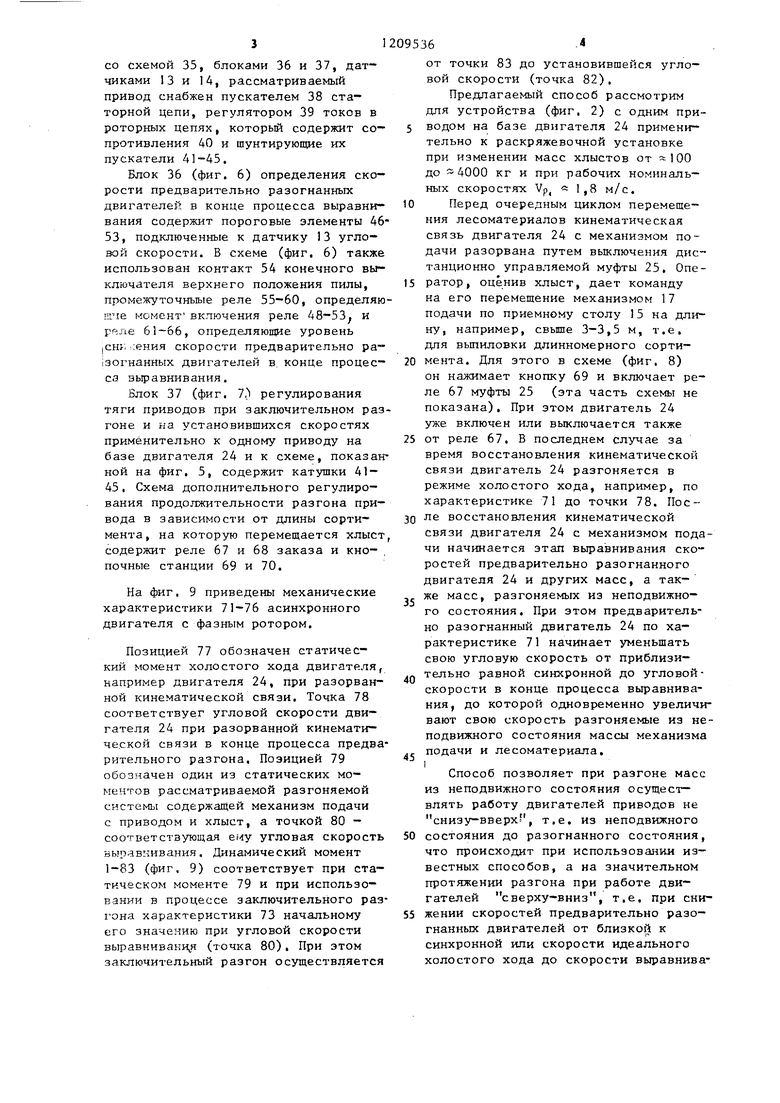
23 и дополнительньй редуктор 29, Устройство по фиг. .3 содержит датчики 13 и 14, приемный стол 15 с силовыми упорами 16, основные и
30 допохп1ительные приводы на базе двигателей 24 и 27 для цепного транспортера 17,, а также приводную от двигателя 27 ряб уху 30, выполненную подъемной и опускающейся под действи-
35 ем 1 й,цроцилиндров 3 .
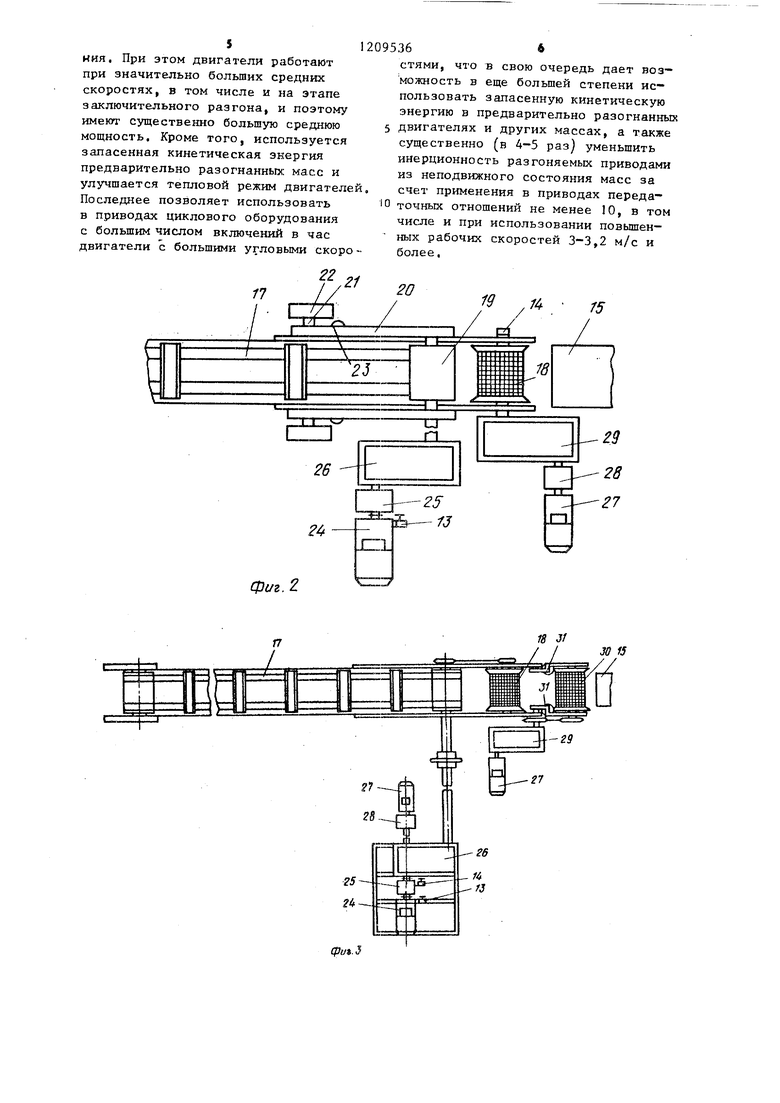
Описанные устройства и их приводы различного исполнения могут управлять ся, напрш ер, по статорным или роторным цепям их двигателей. При регу -
ролики 2 и 3s закрепленные на рычагах ® лировании тягипо статорным цепям
4 и 5;. которые шарнирно 6 и 7 закреп- (Фиг, 4),, например, одного двигателя
24 он подключен к сети пускателем 32 и рег-улятором 33 статорного напряжения, В роторной цепи включены сопро-
лены на лотке и выполнены с возможностью прижима к боковой позерхно-- сти хлыста и отвода от него под дей™ ствием гидроцилиндров 8 и 9, Ролики 2 ,и 3 соединены с двигателями 10 и 11. Кроме того, механизм перемещения содерясит центрирующую рябуху 12 Ролик 2 содержит датчик 13 угловой скорости, а рябуха 2 снабжена датчиком 4 скорости материалов. Для торможения и останова в данном случа а также при применении других подающих механизмов используется приег г- ный стол 15 с силовыми, амортизированными упорами 16, аналоги нь ми применяемым в раскряжевочнься: установках.
to
0953,62
Устройство по фиг, 2 содержит датчики 13 и 14, приемный стол 15 с силовыми упорами 16, цепной транспортер 17 с центрируюш.ей рябухой
- 18 и прижимным роликом 19; закрепленным над цеп1шм транспортером в рыч:аге 20, которые шарнирно 21 закреплены на стойках 22 и снабжены гидроцилиндрами 23 их подъема и опускания,
При .этом подачи механизма 1 7 снабжен двумя приводами различного исполнения j первьй (фиг, 2) используется применительно к механизму 17
для раскряжевочной установки при рабочих скоростях Vp Ij8 м/с и содержит Один привод зключаюшдй основной двигатель 24, дистанционно управляемую муфту 25 и редуктор
2t 26 J второй содержит два привода: первый основной привод, рассмотренный выше с двигателем 24, и второй дополнительный привод рябухи 18, содержащий дополнительньй двигатель
23 и дополнительньй редуктор 29, Устройство по фиг. .3 содержит датчики 13 и 14, приемный стол 15 с силовыми упорами 16, основные и
допохп1ительные приводы на базе двигателей 24 и 27 для цепного транспортера 17,, а также приводную от двигателя 27 ряб уху 30, выполненную подъемной и опускающейся под действи-
ем 1 й,цроцилиндров 3 .
Описанные устройства и их приводы различного исполнения могут управляться, напрш ер, по статорным или роторным цепям их двигателей. При регу -
(Фиг, 4),, например, одного двигателя
24 он подключен к сети пускателем 32 и рег-улятором 33 статорного напряжения, В роторной цепи включены сопро-
тивления 34, В системе управления использованы схема 35 сравнения скорости предварительно разогнанного двигателя 24 и раз-гоняемьгх из неподвижного состояния масс, который соединенс аналогичными датчиками 13 и 14, блок 36 определения угловой скорости предварительно разогнанных двигателей в конце процесса выравнивакиЯр блок 37 регулирования тяги приводов при
заключительном разгоне и на установившихся скоростях.
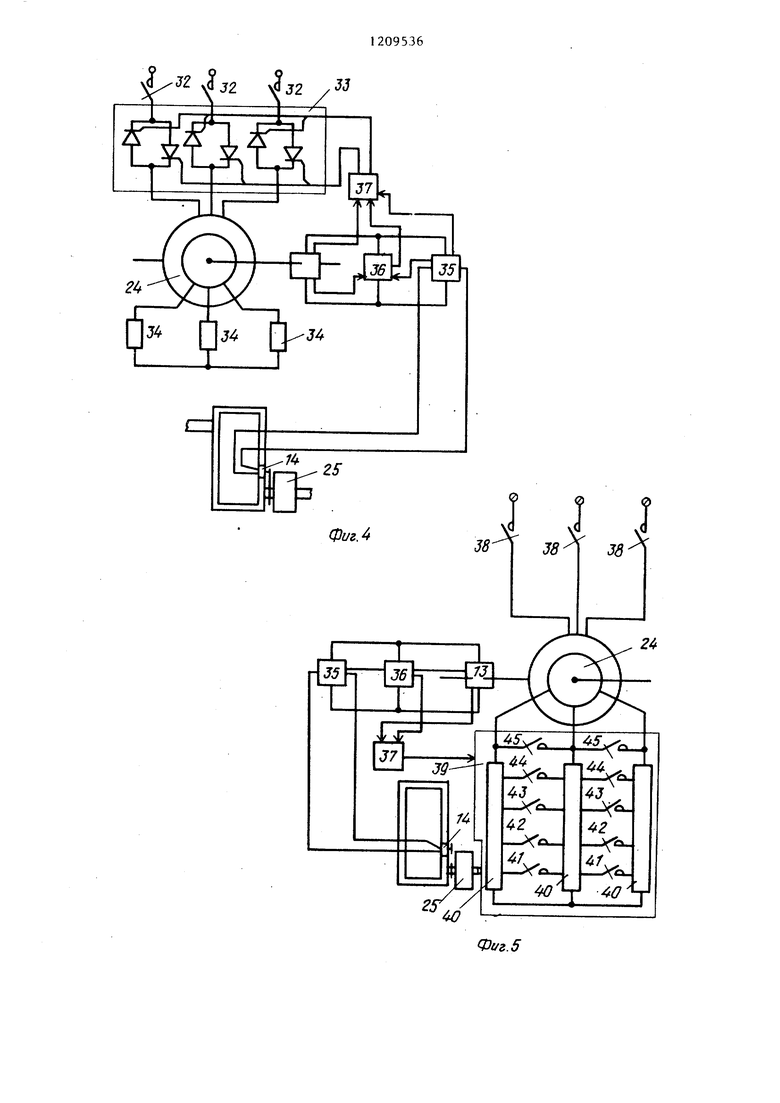
При регулировании тяги двигателя 24 по роторным цепям (фиг, 5) наряду
со схемой 35, блоками 36 и 37, датчиками 13 и 14, рассматриваемый привод снабжен пускателем 38 ста- торной цепи, регулятором 39 токов в роторных цепях, который содержит сопротивления 40 и шунтируюгцие их пускатели 41-45,
Блок 36 (фиг. 6) определения скорости предварительно разогнанных двигателей в конце процесса выравнивания содержит пороговые элементы 46 53, подключенные к датчику 13 угловой скорости. В схеме (фиг, 6) также использован контакт 54 конечного выключателя верхнего положения пилы, промежуточныые реле 55-60, определяю ЕГ ш момент включения реле 48-53 и , определяющие уровень |снк :;ения скорости предварительно ра™ 1зогнанных двигателей в. конце процес са выравнивания.
Блок 37 (фиг. 7.) регулирования тяги приводов при заключительном разгоне и на установившихся скоростях применительно к одному приводу на базе двигателя 24 и к схеме, показанной на фиг. 5, содержит катушки 41- 45, Схема дополнительного регулирования продолжительности разгона привода в зависимости от длины сортимента, на которую перемещается хлыст содержит реле 67 и 68 заказа и кно- почные станции 69 и 70.
На фиг, 9 приведены механические характеристики 71-76 асинхронного двигателя с фазным ротором.
-
Позицией 77 обозначен статический момент холостого хода двигателя, например двигателя 24, при разорванной кинематической связи. Точка 78 соответствуег угловой скорости двигателя 24 при разорванной кинематической связи в конце процесса предварительного разгона. Позицией 79 обозначен один из статических мо- ь-ентов рассматриваемой разгоняемой системы содержащей механизм подачи с приводом и хлыст, а точкой 80 - соответствующая ему угловая скорость выравнивания. Динамический момент 1-83 (фиг. 9) соответствует при статическом моменте 79 и при использовании в процессе заключительного разгона характеристики 73 начальному его значению при угловой скорости выравниваки т (точка 80), При этом заключительный разгон осуществляется
-
,
10
20
209536.4
от точки 83 до установившейся угловой скорости (точка 82).
Предлагаемый способ рассмотрим для устройства (фиг. 2) с одним приводом на базе двигателя 24 применительно к раскряжевочной установке при изменении масс хлыстов от -100 до 4000 кг и при рабочих номинальных скоростях VP, 1,8 м/с.
Перед очередным циклом перемещения лесоматериалов кинематическая связь двигателя 24 с механизмом подачи разорвана путем выключения дистанционно управляемой муфты 25. Опе15 ратор, оценив хлыст, дает команду на его перемещение механизмом 17 подачи по приемному столу 15 на длину, например, свыше 3-3,5 м, т.е. дпя выпиловки длинномерного сортимента. Для этого в схеме (фиг. 8) он нажимает кнопку 69 и включает реле 67 муфты 25 (эта часть схемы не показана). При этом двигатель 24 уже включен или выключается также от реле 67. В последнем случае за время восстановления кинематической связи двигатель 24 разгоняется в режиме холостого хода, например, по характеристике 71 до точки 78. Пос30 ле восстановления кинематической
связи двигателя 24 с механизмом подачи начинается этап выравнивания ско ростей предварительно разогнанного двигателя 24 и других масс, а также масс, разгоняемых из неподвижного состояния. При этом предварительно разогнанный двигатель 24 по характеристике 71 начинает уменьшать свою угловую скорость от приблизительно равной синхронной до угловой- скорости в конце процесса выравнивания, до которой одновременно увеличивают свою скорость разгоняемые из неподвижного состояния массы механизма подачи и лесоматериала.
25
35
40
45
I
Способ позволяет при разгоне масс из неподвижного состояния осуществлять работу двигателей приводов не снизу-вверх, т.е, из неподвижного
50 состояния до разогнанного состояния, что происходит при использовании известных способов, а на значительном протяжении разгона при работе двигателей сверху-вниз, т.е, при сни55 жении скоростей предварительно разогнанных двигателей от близкой к синхронной или скорости идеального холостого хода до скорости выравниваS1
ния. При этом двигатели работают при значительно больших средних скоростях, в том числе и на этапе заключительного разгона, и поэтому имеют существенно большую среднюю мощность. Кроме того, используется запасенная кинетическая энергия предварительно разогнанных: масс и улучшается тепловой режим двигателей Последнее позволяет использовать в приводах циклового оборудования с большим числом включений в час двигатели с большими угловыми скоро09536
стями, что в свою очередь дает возможность в еще большей степени использовать запасенную кинетическую энергию в предварительно разогнанных 5 двигателях и других массах, а также существенно (в 4-5 раз) уменьшить инерционность разгоняемых приводами из неподвижного состояния масс за счет применения в приводах переда- iO точных отношений не менее 10, в том
числе и при использовании повышен- ных рабочих скоростей 3-3,2 м/с и более,
/7
20
:V
Г5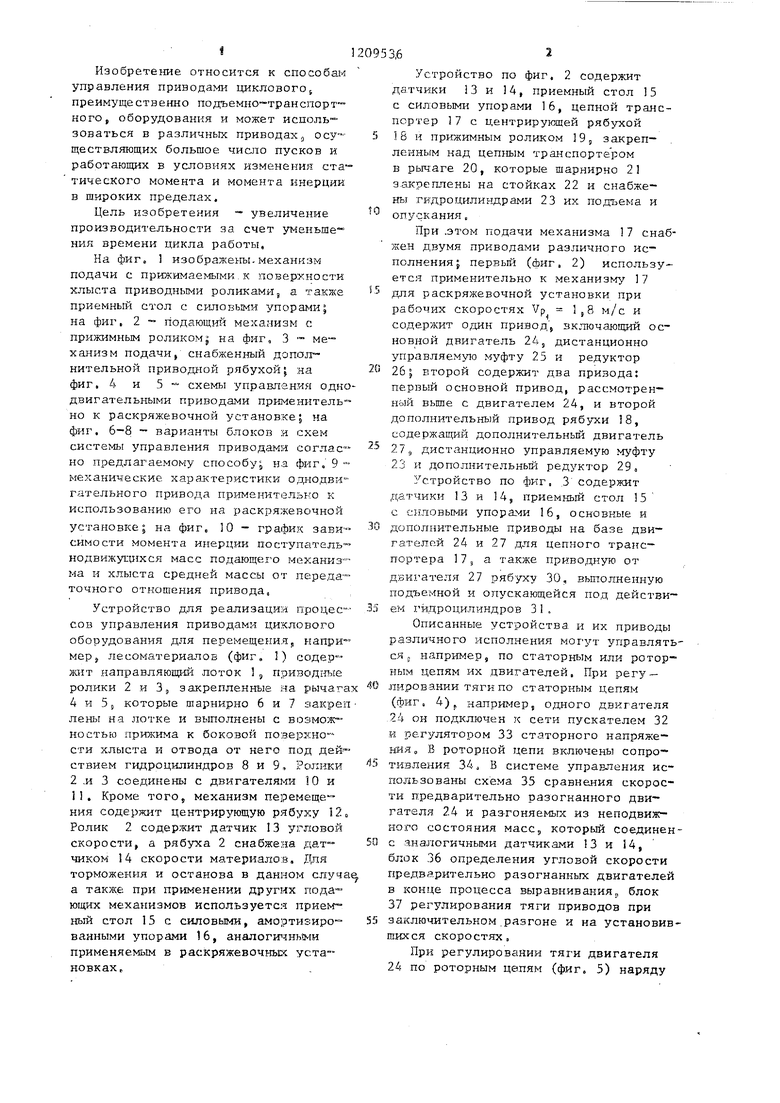

2
фиг. 2
29
28 -27
(put. У
Г8 Jf
JO 15
.32 .J
JJ
Г
ФигЛ
38
« ,Л
J8
24
Фиг.5
Г
: :r:i т-:г:г :ггг7г7:т:тт1 -11: т Ттттттп тп
...П . . 5Пл;.5 .я }dw}o: ,;г;s Л ,5&) ffA f П .j/Д /;й jf W
f . :-- -- -f::-.i,-: - : Ь. L. I L. I Iv . J . ч w , и U: ; « 1,5-; ч |./ .. Л Sj
;-.(---- . --- 1ii- -- J c- e-- ( - - r
ir Ф
-Jp
Iv.. Л Sj
e-- ( - - r
ir Ф
J| i
--T
1Я-
Фг/;;. 7
«,.
7/7лЛ г//
fJO
J6,36
16J7
Бугир
Г6 ГВ
в ГО Г2 Г
Фиг. Ю
Составитель И. Назаркина Техред 3.Палий Корректор С. Черни
Г6 ГВ 20
Заказ 445/25 Тираж 833 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
| Воевода Д | |||
| К | |||
| и др | |||
| Пособие для оператора полуавтоматических липий | |||
| М | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Катодное реле | 1918 |
|
SU159A1 |
