Изобретение относится к лесной промышленности и может быть использовано в устройствах для раскряжевки хлыстов на заданные длины сортиментов.
Цель изобретения - уменьшение динамических нагрузок и повышение эксплуатационной надежности.
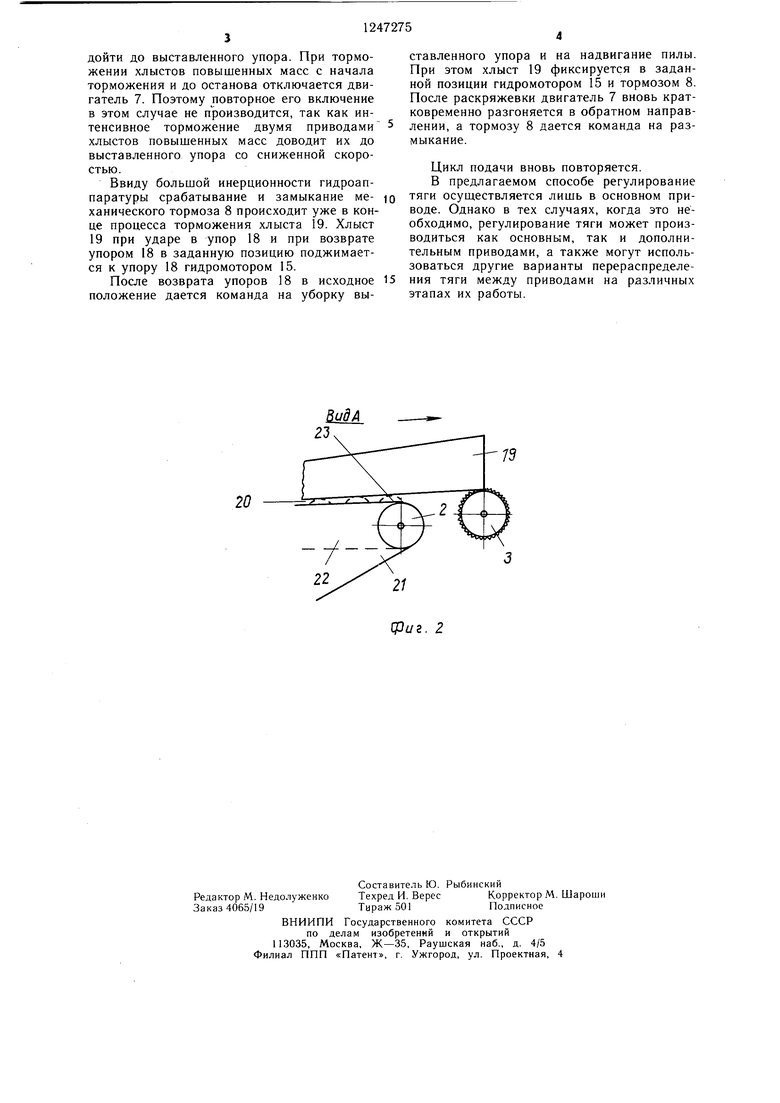
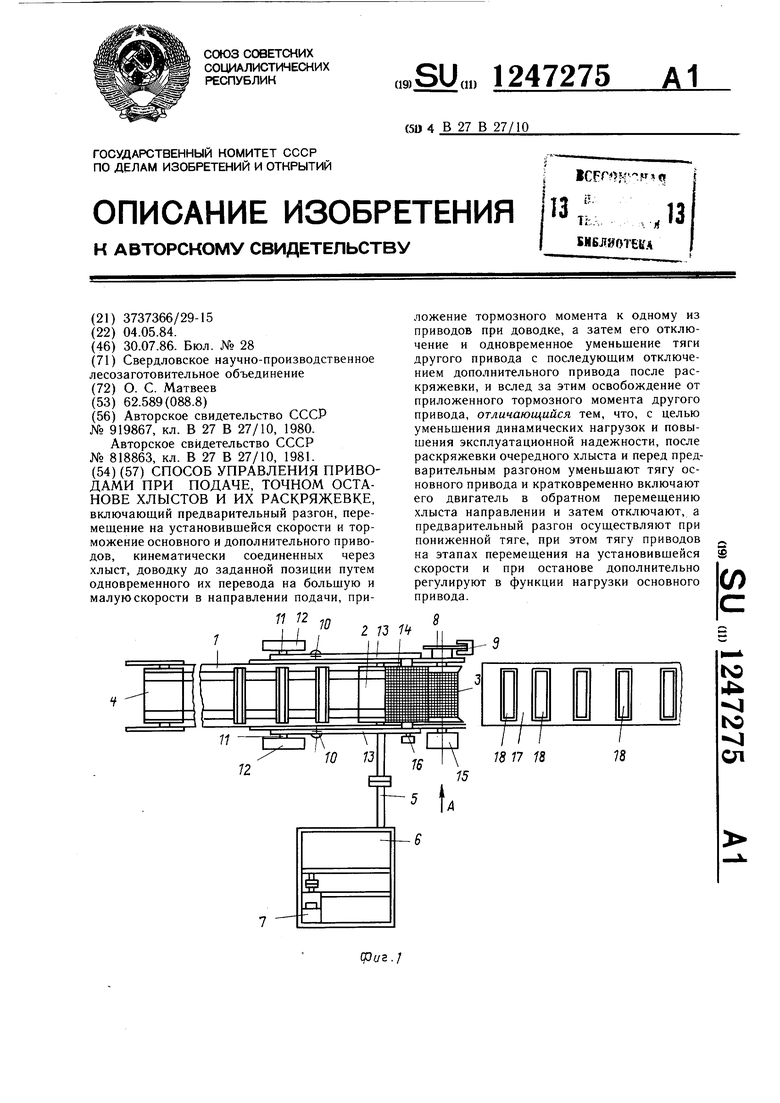
На фиг. 1 показано устройство для раскряжевки хлыстов, осуш.ествляюшее способ управления приводами при подаче, точном останове хлыстов и их раскряжевке; на фиг. 2 - вид А на фиг. 1.
Устройство для реализации способа управления приводами при подаче, точном останове хлыстов и их раскряжевке содержит механизм подачи 1, например цепной тран10
тается заторможенной, а хлыст 19 неподвижным.
Холостая ветвь 21 цепного транспортера натягивается и переходит в положение 22, а рабочая ветвь 20 расслабляется и переходит в положение 23. При возвращении пилы в исходное положение срабатывает датчик, который отключает пускатель (не показаны), и кратковременная работа двигателя 7 прекраш,ается.
При последующей подаче хлыста 19 оператор делает соответствующий заказ. При этом ролик 14 продолжает быть прижатым к хлысту 19 с максимальным усилием и одновременно включается двигатель 7 и гидромотор 15. Осуществляется их совместный
спортер ЛО-15С, с ведущим туером 2, 15 разгон, но при этом условия разгона двицентрирующей рябухой 3 с шипами и ведомым туером 4. Ведущий туер 2 посредством вала 5 соединен с редуктором 6 и двигателем 7. На валу рябухи 3 установлен механический тормоз 8, например дисково- колодочный, со скобой 9, в которую встроены гидроцилиндры его замыкания (не показаны). Над механизмом подачи 1 установлены подъемные от гидроцилиндров 10, шар- нирно 11 закрепленные на стойках 12 ры20
гателей совершенно различны. Двигатель 7 вначале работает в режиме, близком к режиму холостого хода, так как он вбирает слабину в гибком тяговом органе. После . выбора всех зазоров при разгоне механизма подачи 1 и хлыста 19 начинается уменьшение скорости двигателя 7 и увеличение скорости гидромотора 15. Уменьшение скорости двигателя 7 с фазным ротором происходит с помощью изменения сопротивлечаги 13, в которых закреплен ролик 14 с 25 ния в цепи ротора. О состоянии разгошипами. На валу рябухи 3 также установлен дополнительный гидромотор 15, а на валу ролика 14 - датчик 16 преобразования угла поворота ролика 14 в число импульсов. В устройстве используется также приемный стол 17 с силовыми упорами 18, аналогич- 30 ный применяемому в раскряжевочной установке Л О-15С. Может быть также использован гладкий приемный стол. На чертеже также показан хлыст 19, торец которого находится на рябухе 3 с шипами, которая имеет кинематическую связь с механизмом по 35 дачи 1 только через хлыст. При этом при включении двигателей 7 и 15 в направлении вперед (по стрелке) рабочая ветвь 20 цепного транспортера натянута, а холостая 21 ослаблена. Наоборот при кратковремен- о ной работе двигателя 7 в направлении назад натягивается холостая 21 ветвь, занимающая условно положение 22, и раслаб- ляется рабочая ветвь 20, занимающая положение 23.
Способ управления приводами при по- 45 даче, точном останове хлыстов и их рас- крыжевке осуществляется следующим образом.
После останова предыдущего хлыста одним из выставленных упоров 18 происходит надвигание пилы и раскряжевка хлыста. При достижении пилой ее нижнего положения происходит срабатывание конечного выключателя, который включает магнитный пускатель (не показаны) двигателя 7. Двигатель 7 разгоняется в обратном направ,- лении при пониженной тяге, одновременно подается команда на размыкание механического тормоза 8, при этом рябуха 3 ос55
няемои системы можно с помощью датчика 16 судить по величине угловой скорости выравнивания. Кроме того, при работе с предварительно разогнанным двигателем 7 про- исх одит саморегулирование его тяги на этапе выравнивания скоростей.
При непрерывном определении величины снижения угловой скорости предварительно разогнанного двигателя на этапе выравнивания при использовании заранее выбранной механической характеристики можно получать данные о необходимой тяге на этапе заключительного разгона, а также о тяге на установившейся и пониженной скорости с учетом минимального нагрева двигателя основного привода.
По окончании этапа выравнивания начинается этап заключительного разгона, при котором осуществляется совместный разгон основного и дополнительного приводов. Независимо от тяги на установившейся скорости ролик 14 начинает поджиматься к хлысту 19 с минимальным усилием. По команде датчика 16 привод переводится на тормозной режим. Осуществляется совместное торможение хлыста 19 двумя приводами при увеличенной силе прижима ролика 14 к хлысту 19, а также дается команда на замыкание тормоза 8. С выдержкой времени после уменьщения скорости хлыста 19 вновь включается двигатель 7, а также гидромотор 15, причем последний на пониженную скорость. При этом двигатель 7 кратковременно работает на малой тяге, так как при интенсивном торможении двумя приводами хлыстов относительно небольших масс они могут не
тается заторможенной, а хлыст 19 неподвижным.
Холостая ветвь 21 цепного транспортера натягивается и переходит в положение 22, а рабочая ветвь 20 расслабляется и переходит в положение 23. При возвращении пилы в исходное положение срабатывает датчик, который отключает пускатель (не показаны), и кратковременная работа двигателя 7 прекраш,ается.
При последующей подаче хлыста 19 оператор делает соответствующий заказ. При этом ролик 14 продолжает быть прижатым к хлысту 19 с максимальным усилием и одновременно включается двигатель 7 и гидромотор 15. Осуществляется их совместный
разгон, но при этом условия разгона двиразгон, но при этом условия разгона дви
гателей совершенно различны. Двигатель 7 вначале работает в режиме, близком к режиму холостого хода, так как он вбирает слабину в гибком тяговом органе. После выбора всех зазоров при разгоне механизма подачи 1 и хлыста 19 начинается уменьшение скорости двигателя 7 и увеличение скорости гидромотора 15. Уменьшение скорости двигателя 7 с фазным ротором происходит с помощью изменения сопротивле
5
няемои системы можно с помощью датчика 16 судить по величине угловой скорости выравнивания. Кроме того, при работе с предварительно разогнанным двигателем 7 про- исх одит саморегулирование его тяги на этапе выравнивания скоростей.
При непрерывном определении величины снижения угловой скорости предварительно разогнанного двигателя на этапе выравнивания при использовании заранее выбранной механической характеристики можно получать данные о необходимой тяге на этапе заключительного разгона, а также о тяге на установившейся и пониженной скорости с учетом минимального нагрева двигателя основного привода.
По окончании этапа выравнивания начинается этап заключительного разгона, при котором осуществляется совместный разгон основного и дополнительного приводов. Независимо от тяги на установившейся скорости ролик 14 начинает поджиматься к хлысту 19 с минимальным усилием. По команде датчика 16 привод переводится на тормозной режим. Осуществляется совместное торможение хлыста 19 двумя приводами при увеличенной силе прижима ролика 14 к хлысту 19, а также дается команда на замыкание тормоза 8. С выдержкой времени после уменьщения скорости хлыста 19 вновь включается двигатель 7, а также гидромотор 15, причем последний на пониженную скорость. При этом двигатель 7 кратковременно работает на малой тяге, так как при интенсивном торможении двумя приводами хлыстов относительно небольших масс они могут не
дойти до выставленного упора. При торможении хлыстов повышенных масс с начала торможения и до останова отключается двигатель 7. Поэтому повторное его включение в этом случае не производится, так как интенсивное торможение двумя приводами хлыстов повышенных масс доводит их до выставленного упора со сниженной скоростью.
Ввиду большой инерционности гидроапставленного упора и на надвигание пилы. При этом хлыст 19 фиксируется в заданной позиции гидромотором 15 и тормозом 8. После раскряжевки двигатель 7 вновь кратковременно разгоняется в обратном направлении, а тормозу 8 дается команда на размыкание.
Цикл подачи вновь повторяется.
В предлагаемом способе регулирование паратуры срабатывание и замыкание ме- ю осуществляется лишь в основном при- ханического тормоза 8 происходит уже в кон- воде. Однако в тех случаях, когда это не це процесса торможения хлыста 19. Хлыст 19 при ударе в упор 18 и при возврате упором 18 в заданную позицию поджимается к упору 18 гидромотором 15.
После возврата упоров 18 в исходное 15 ния тяги между приводами на различных положение дается команда на уборку вы-этапах их работы.
обходимо, регулирование тяги может производиться как основным, так и дополнительным приводами, а также могут использоваться другие варианты перераспределеставленного упора и на надвигание пилы. При этом хлыст 19 фиксируется в заданной позиции гидромотором 15 и тормозом 8. После раскряжевки двигатель 7 вновь кратковременно разгоняется в обратном направлении, а тормозу 8 дается команда на размыкание.
В предлагаемом способе регулирование осуществляется лишь в основном при- воде. Однако в тех случаях, когда это не
ния тяги между приводами на различных этапах их работы.
обходимо, регулирование тяги может производиться как основным, так и дополнительным приводами, а также могут использоваться другие варианты перераспределе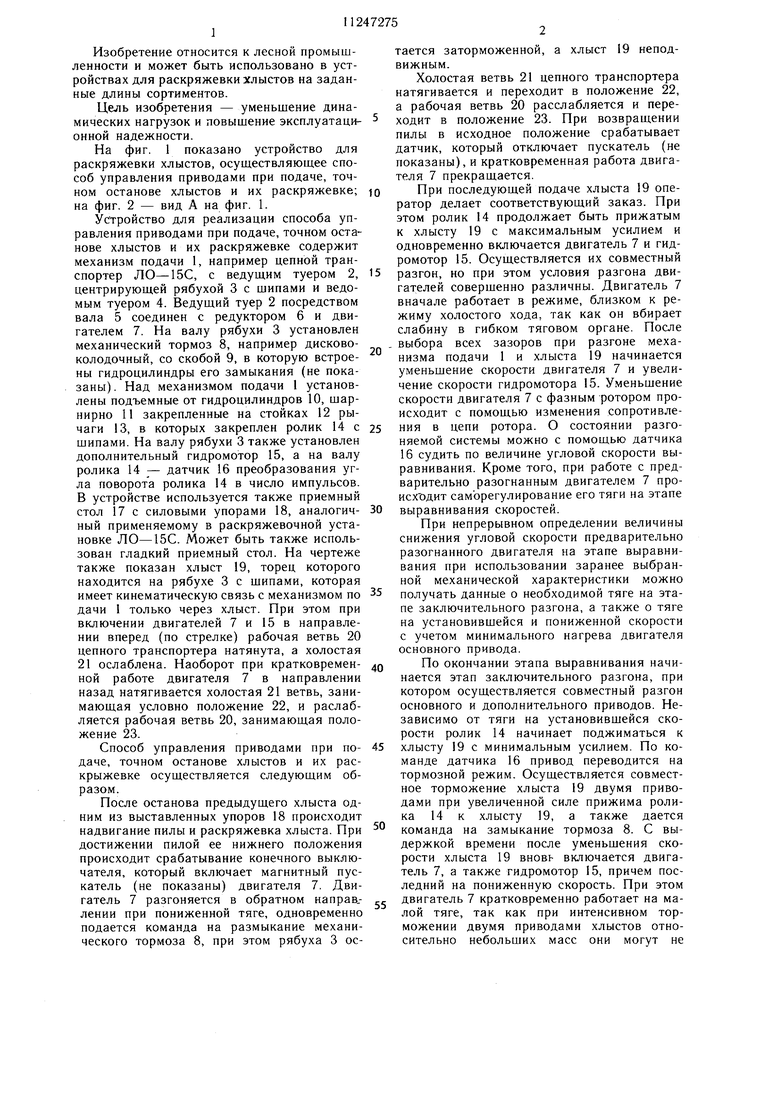
ВидА
20
21
Сриг. 2
| Устройство для подачи и точного останова хлыстов раскряжовочной установки | 1980 |
|
SU919867A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Способ управления электроприводамипРи пОдАчЕ, ТОчНОМ OCTAHOBE ХлыСТОВи иХ РАСКРяжЕВКЕ | 1979 |
|
SU818863A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
