5-5
(Л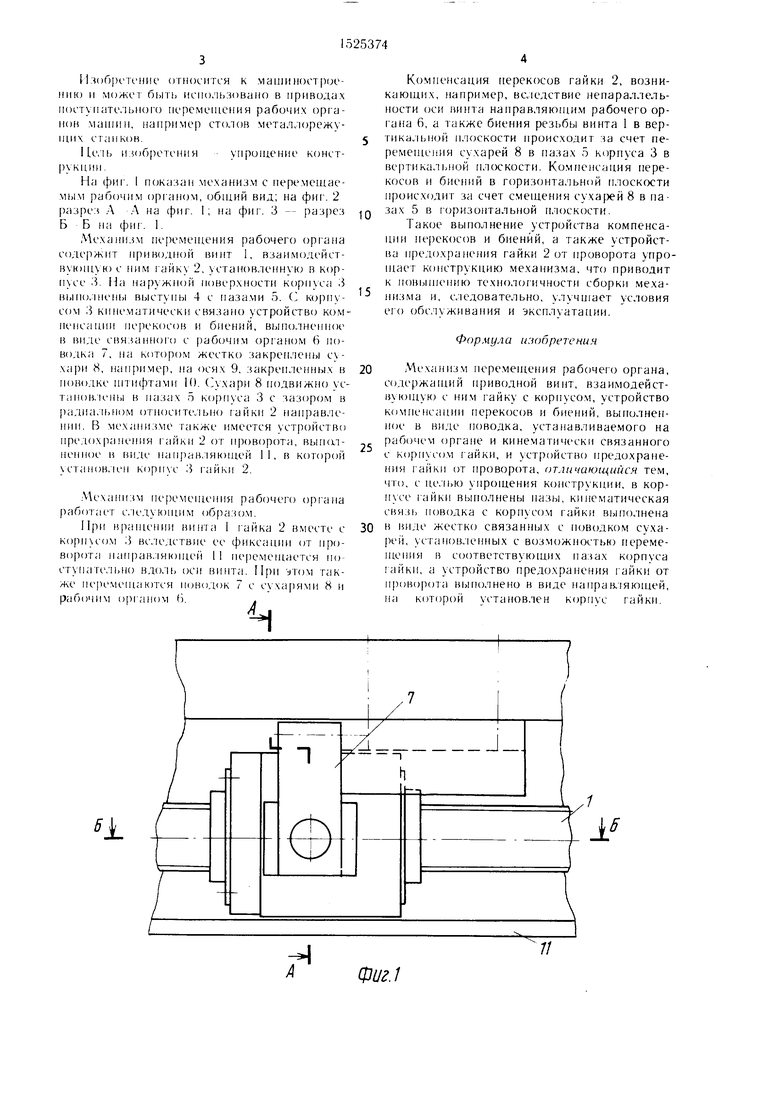
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения рабочего органа (его варианты) | 1983 |
|
SU1209970A1 |
| Винтовой привод | 1987 |
|
SU1523802A1 |
| Устройство линейного перемещения исполнительного органа | 1989 |
|
SU1719753A1 |
| Винтовая передача | 1985 |
|
SU1320572A1 |
| Приспособление для заточки протяжек | 1985 |
|
SU1324824A1 |
| Способ передачи изделий из зоны накопления на конвейер и устройство для его осуществления /его варианты/ | 1985 |
|
SU1283192A1 |
| Механизм линейного перемещения | 1989 |
|
SU1774103A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2464451C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268401C2 |
| ВИНТОВОЙ МЕХАНИЗМ | 2002 |
|
RU2226246C2 |
Изобретение относится к машиностроению и может быть использовано в приводах подач машин. Цель изобретения - упрощение конструкции. С винтом взаимодействует гайка 2, установленная в корпусе 3. Гайка 2 посредством поводка связана с рабочим органом. Поводок связан с корпусом 3, гайки 2 через сухари 8 жестко закреплены на поводке и подвижно установлены в пазах корпуса 3. Имеется устройство предохранения гайки 2 от проворота, выполненное в виде направляющей, на которой установлен корпус 3 гайки 2. При вращении винта гайка 2 совместно с корпусом 3 вследствие фиксации от проворота направляющей перемещается поступательно вдоль оси винта, вместе с гайкой 2 перемещаются поводок и рабочий орган. При непараллельности оси винта направлению перемещения рабочего органа или радиальном биении винта происходит компенсация перекосов и биений за счет смещения гайки 2 относительно сухарей 8 в горизонтальной и вертикальной плоскостях. 3 ил.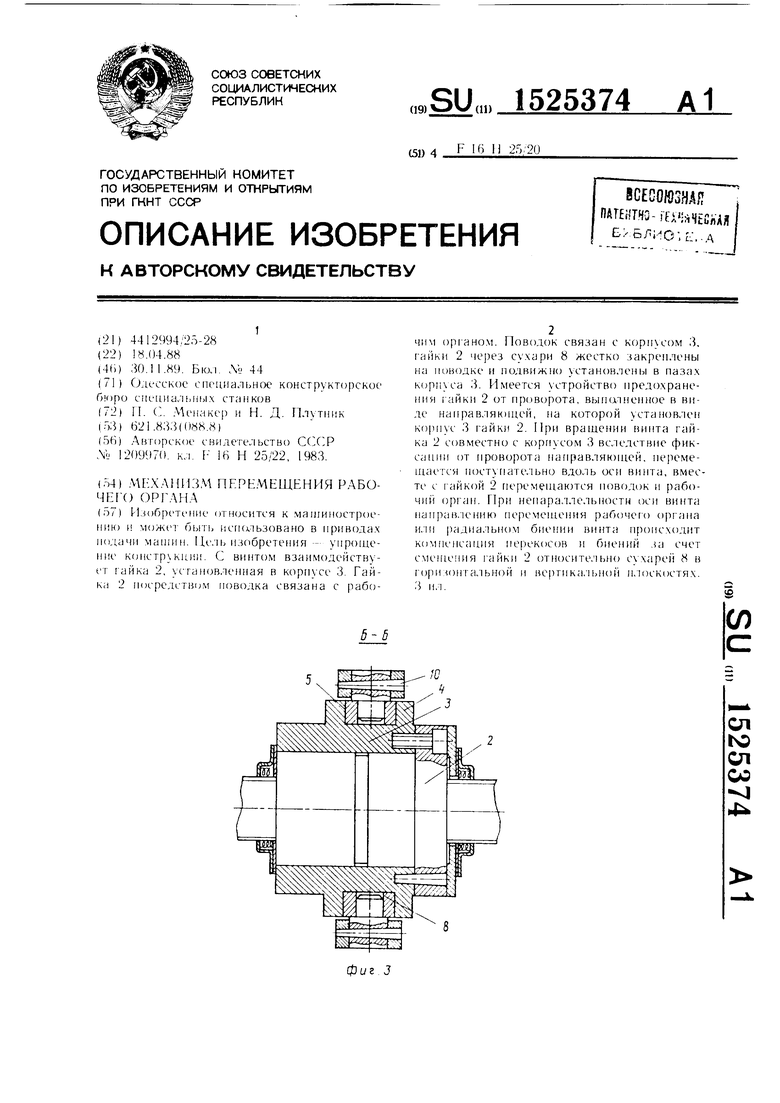
фиг. 3
0
ел ьо ел
оо 4;
И.чобрстс иие относится к Maiiinii()CT)oe- ник) и может п|)1ть использовано в приводах 11остунатс. 1ьи()Г(; перемещения рабочих органом ман1ип, например столов металлорежу- Hui станков.
lU .Tb изобретения упрои;ение конет- |)укнип.
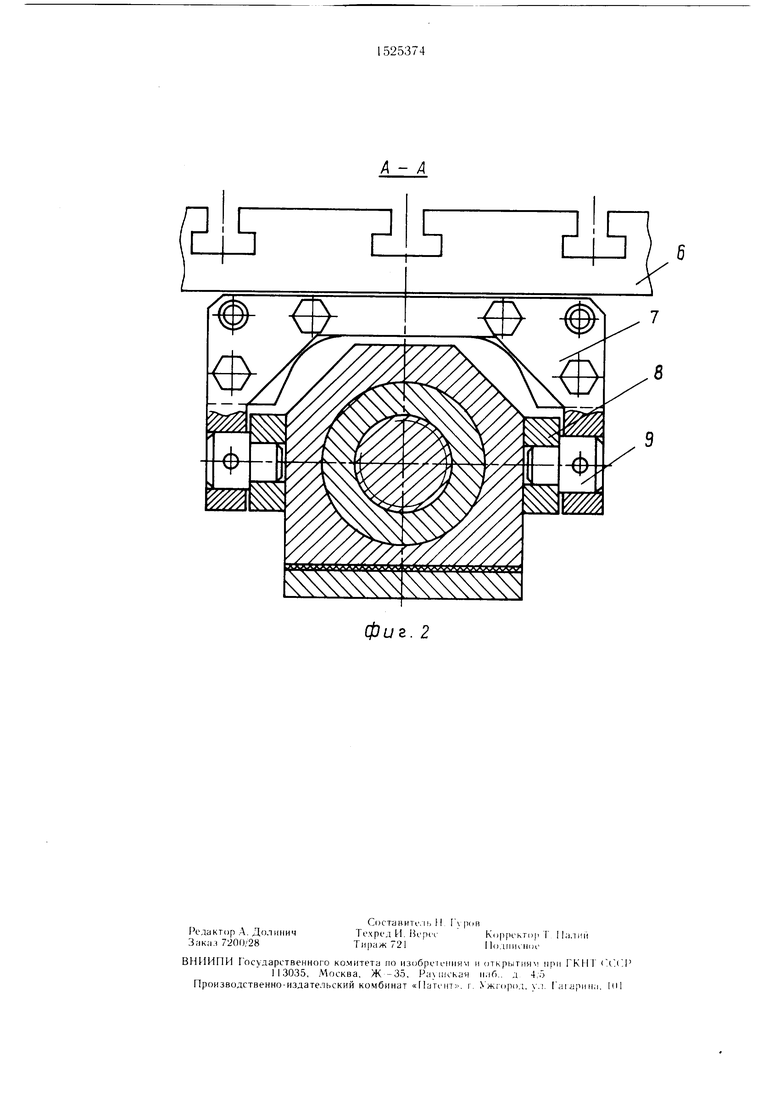
На фиг . I показан механизм с перемещаемым рабочим opi aHOM, обп|ий вид; на фи 2 разрез Л Л на фиг. I; на фиг. 3 -- разрез Б Б па фиг. 1.
Механнзм перемеп|ения рабочего органа содержит приводной винт 1, взаимодейст- вук)П1ун) с ним гайку 2, установленную в корпусе 3. На па)ужной поверхности корпуса 3 выпо.1пены выступы 4 с паза.ми 5. ( корпусом 3 кпнематически связано устройство ком пенса пни перекосов и биений, выполненное в нде связанно1 о с рабочим органом 6 поводка 7, па котором жестко закреплены су- ха1)и 8, например, па оеях 9, закрен-леипых в гюнодке щтнфтами 10. (Сухари 8 подвижпо ус танов.1ены в пазах о ко)пуса 3 с зазором в )адиальп()м относительно гайкн 2 панравле- ппн. В механизме также имеется устройство предохранеппя гайки 2 от ироворота, вьпкхт- ненное в ги1де направляющей 11, в которой установ.чеп корпус 3 гайки 2.
;V exaini3M пе)емепкм|ня рабочего органа работает с. 1едук)пи1м образо.м.
Нрн вра1пепии винта I i-айка 2 вместе е Kopii c(m 3 вследствпе ее фиксации от про- ворота паправ. 1яюи1ей И пе|)еме1цается по- ступательпо вдоль оси випта. При :1Том также переме1пак)тся иоводок 7 с суха)ями 8 и рабочим о)ганом fi.
6
5
0
0
5
Компенсация перекосов гайки 2, возникающих, например, вследствие непараллель- поети оси винта направляюни1м рабочего органа 6, а также биения резьбы винта 1 в вертикальной плоскости происходит за счет пе- ремен1ения сухарей 8 в пазах 5 корпуса 3 в ве|)тикальпой плоскости. Компенсация перекосов и биений в горизонтальной плоскости происходит за счет смещения суха)ей 8 в пазах 5 в горизонтальной плоскости.
Такое выполнение устройства компенсации нерекоеов и биений, а также устройства нредохрапенпя гайки 2 от нроворота упрощает конструкцию механизма, что приводит к повьинению технологичности сборки механизма и, следовательно, улучшает условия его обслуживания и эксплуатации.
Формула изобретения
ЛАеханнзм перемеп1ения рабочего органа, содержащий приводной винт, взаимодейст- ByiontyK) с ним гайку с корпусом, устройство компенсации перекосов и биений, выполнен- пое в впде поводка, устанавливаемого на рабочем органе и кинематически связанного с корпусом гайкп, и устройство предохранения гайкп от проворота, отличающийся тем, что, с целью упрощения конструкции, в корпусе гайки выполнены назы, кинематическая связь поводка с KopnyccjM гайки выполнена в виде жестко связанных с поводком сухарей, установ.тенных с возможностью нереме- Н1.СНИЯ в соответствующих назах корпуса гайки, а устройство предохранения гайки от проворота выполнено в виде напраатяющей, на которой установлен корпус гайки.
6
Фиг.1
Л - /
фиг. 2
