35
о {
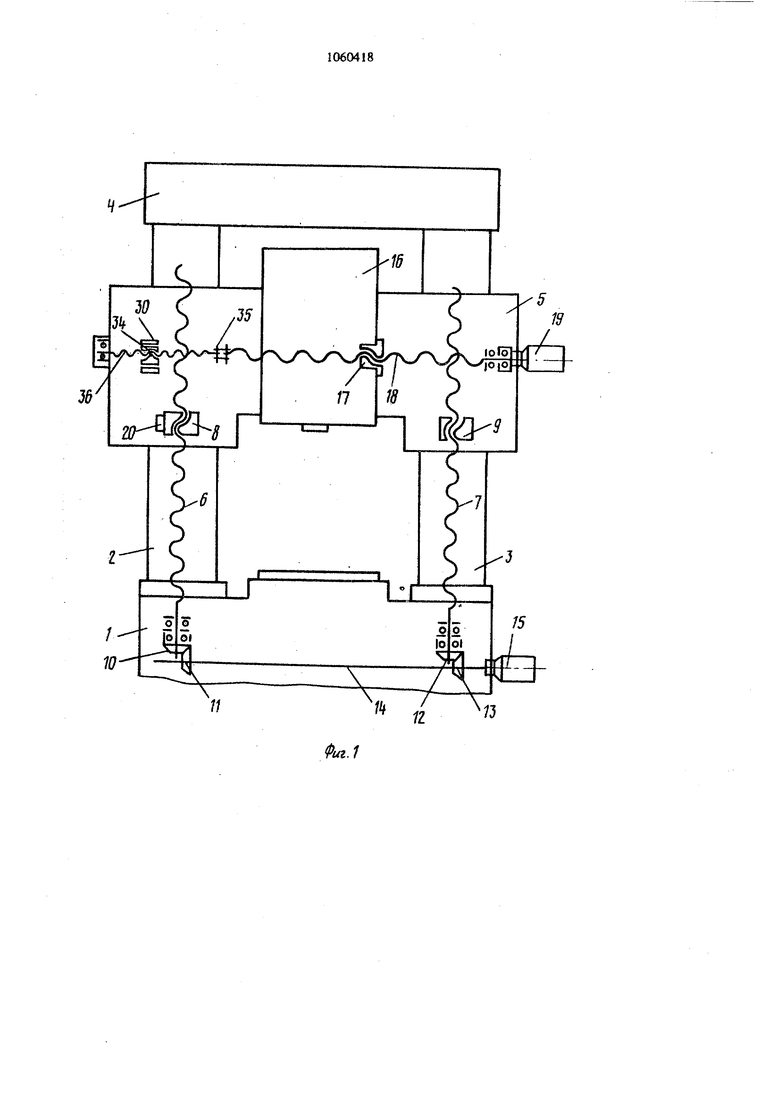
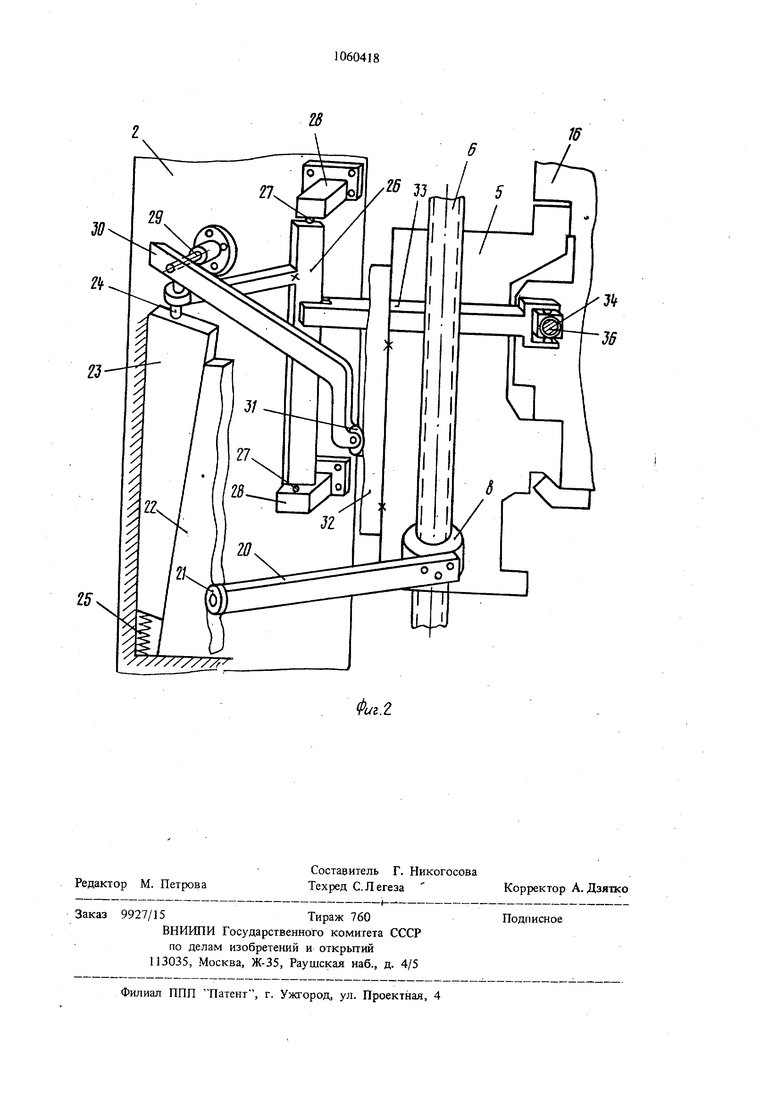
X 1106 Изобретение относится к станкостроению и предназначено для использования в станках портального типа с высокой точностью позицио нирования поперечины относительно плоскости стола станка. Известно устройство для автоматического позиционирования поперечины в станках портального типа, содержащее датчики уровня, располоисенные на поперечине и столе станка, блок сравнения, усилитель, электрогидроареобр зователь, упругую гидрокамеру, разделяющую заполненный рабочей жидкостью гидравлический тракт и подвижную опору ходового винта для микроперемещений подвижных опор ходовых винтов поперечины, установленных с зазором относительно ее направляющих 1. Однако известное устройство сложно в изготовлении, наладке и эксплуатащ1и. Нежесткая Конструкция опор ходовых винтов не обе печивает микронной точности выравнивания поперечины в станках высокой точности. Известно также устройство выравнивания поперечины в станках портального типа, состоящее из двух копиров, расположенных соответ ственно на стойке и поперечине станка, взаимо действующих между собой и через гидравлическую систему управления, заставляющих один из винтов вращаться в ту или другую . сторону в зависимости от расположения щпиндельной бабки на поперечине и положения самой поперечины по высоте, компенсируя разность растяжения винтов и выравнивая поперечины относительно плоскости стола 2. Недостатком известного устройства является применение в устройстве гидравлики, что услож1юет конструкцию и снижает надежность устройства, кроме того, устройство не компенсирует погрещность изготовления винтов по шагу, а эта погрещность составляет значительную часть общей погрешности позициониро вания поперечины относительно поверхности стола станка. Цель изобретения - упрощение конструкции и повышение точности за счет компенсации погрешности изготовления ходового винта. Указанная цель достигается тем, что в станке портального типа, содержащем станину, стойки, передачи винт-гайка для перемещения поггеречины и шпиндельной бабки и механизм компенсации перекоса поперечины, включающий копиры, один из которых расположен на одной из стоек, а другой - на поперечине, механизм компенсации выполнен в виде несущих ролики рычагов, подпружиненного клина, толкателя и двухсторонней вилки, одним концом связанной с винтом шпиндельной бабки через введенную дополнительную гайку, а другим концом - с толкателем, установленным с возможностью поворота, осевого перемещения и взаимодействующим с клином, размещенным в указанной стойке и воздействующим на копир, установленный с возможностью Перемещения, причем один из рычагов одним концом жестко связан с гайкой поперечины, другим концом через ролик - с упомянутым копиром, а второй рычаг размещен с возможностью поворюта и взаимодействия одним концом с толкателем, другим через ролик - с копиром поперечины. На фиг. 1 изображен станок, общий вид; на фиг. 2 - механизм компенсации перекоса траверсы. Станок содерясит станину 1, стойки 2 и 3, перекладину 4, поперечину 5, перемещаемую по стойкам 2 и 3 посредством ходовых винтов 6 и 7 и гаек 8 и 9, расположенных в поперечине 5. Гайка 9 жестко закреплена в поперечине 5, а гайка 8 установлена с возможностью поворота в поперечине 5 относительно ходового винта 6. Винты 6 и 7 приводятся во вращение через конические шестерни 10, 11 и 12 и 13 соответственно через вал 14 от зЛектродвигателя 15. На поперечине 5 расположены шпиндельная бабка 16 с гайкой 17, ходовой винт 18 и электродвигатель 19. Гайка 8 жестко соединена с рычагом 20, взаимодействующим через ролик 21 с подвижно расположенным в стойке 2 копиром 22, который опирается на размещенный в стойке 2 клин 23, взаимодействующий с толкателем 24 и подпружиненный пружиной 25, причем плоскость клина, предназначенная для взаимодействия с толкателем выполнена наклонной. Толкатель 24 размещен с возможностью осевого перемещения в Т-образной планке 26, установленной на осях 27 в кронштейнах 28,, закрепленных на стойке 2, на которой также закреплена ось 29, несущая рычаг 30 с роликом 31, взаимодействующим с копиром 32, жестко закрепленным на поперечине 5. Планка 26 через двухстороннюю вилку 33 соединена с дополнительной гайкой 34. Ходовой винт 18 шпиндельной бабки 16 посредством муфты 35 с ходовым винтом 36, имеющим более мелкую резьбу. Дополнительная гайка 34 размещена на ходовом винте 36. Станок работает следующим образом. Шпиндельная бабка 16, перемещаясь по поперечине 5, своим весом деформирует ходовые винты 6 и 7 на различную величину. В это же время винт 18 через муфту 35, винт 36 и гайку 34 смещает правый конец двухсторонней вилки 33, который, в свою очередь, поворачивает Т-образную планку 26 с расположенным в ней толкГателем 24, который одаим концом, упираясь в рычаг 30, а другим в наклонную плоскость клина 23, сдвигает последний вниз или дает клину 23 возможность под действием пружины 25 переместиться вверх в зависимости от расположения шпиндельной бабки слева или справа на поперечине 5, а клин 23, в свою очередь, перемещает копир 22 в горизонтальном направлении, который через рычаг 20 поворачивает гайку 8 на требуемую величину, компенсируя разность деформации винтов 6 и 7, что и приводит к выравниванию поперечины 5. Если шпиндельная бабка 16 находит ся на середине поперечины 5, т. е. ее вес распределяется на винты .6 и 7 равномерно, то толкатель 24 останавливается в расчетной точке и дальнейшее перемешение клина 23 не про иcxoдиt. В зависимости от положения поперечины 5 по высоте меняется длина деформируемой части винтов 6 и 7, а вместе с зтим и величина деформации последних. Компенсация этой разницы деформаций происходит за счет доворота гайки 8. Поперечина 5, перемещаясь, перемещает закрепленный на ней копир 32, который через ролик 31 воздействует на рычаг 30. Последний поворачиваясь вокруг оси 29, воздействует на толкатель 24, который воздействует на клин 2 толкает клин вниз или дает возможность ему 84 переместиться вверх под действяеь пружины 25, перемещая при зтом копир 22 и контактирующий с ним рычаг 20, который и доворачнвает гайку 8. Во время перемещения поперечины 5 происходит также и кокшенсация разности шагов винтов б и 7. Гайка 8 и закрепленный на ней ры«г 20 перемещаются вместе с поперечиной 5. Ролик 21 шчага 20 скользит по копиру 22 и доворачивает гайку 8 согласно профилю копира. Предлагаемое выполнение механизма компенсация позволяет одновременно осуществлять корректировку положения поперечины в зависимости от положения шпиндельной бабки на поперечине, от положения самой поперечины по высоте относительно стола станка и от разницы шагов ходовых винтов, перемещающие поперечины. Все зто позволяет повысить точность станка. Кроме того, упрощается конструкция за счет исключения гндравлическш системы, Ч1О, в свою очередь, исключает влияние таких случайных факторов, как утечка рабочего тела, снижение рабочего давления, неправильное срабатывание датчиков, присущих гидравлическим системам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического позиционирования поперечины | 1978 |
|
SU747695A1 |
| Устройство для автоматического позиционирования поперечины | 1978 |
|
SU738786A1 |
| Устройство для автоматическогопОзициОНиРОВАНия РАбОчЕгО ОРгАНА | 1979 |
|
SU831531A1 |
| Устройство для компенсации перекоса траверсы | 1975 |
|
SU573268A1 |
| Станок портального типа | 1983 |
|
SU1189658A1 |
| СТАНОК ПОРТАЛЬНОГО ТИНАВ П Т Б IФОНД effcficproa | | 1972 |
|
SU421439A1 |
| Станок портального типа | 1979 |
|
SU958042A1 |
| Станок портального типа | 1980 |
|
SU918017A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU931385A1 |
| КОПИРОВАЛЬНО-ФРЕЗЕРНЬ^Й СТАНОК | 1968 |
|
SU217893A1 |
СТАНОК ПОРТАЛЬНОГО ТИПА, содержащий станину, стойки, передачи винт-гайка для перемещения поперечины и шпиндельной бабки и механизм компенсации перекоса поперечины, включающий копиры, один из которых расположен на одной из стоек, а другой - на поперечине, отличающийся тем. что, с целью упрощения конструкции и повыщения точности за счет компенсации погрешности изготовления ходового винта, механизм компенсации выполнен в виде несущих ролики рычагов, подпружиненного клина, толкателя и двухсторонней вилки, одним концом связанной с винтом шпиндельной бабки через введен|ную дополнительную гайку, а другим концом с толкателем, установленным с возможностью поворота, осевого перемещения и взаимодействующим с клином, размещенным в указанной стойке и воздействующим на копир, установленный с возможностью перемещения, причем один из рычагов одним концом жестко связан с гайкой поперечины, другим концом через ро|лик - с упомянутым копиром, а второй рычаг размещен с возможностью поворота и взаимог, (Л действия одним концом с толкателем, другим через ролик - с копиром поперечины.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматическогопОзициОНиРОВАНия пОпЕРЕчиНы | 1979 |
|
SU810441A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ПОЛУЧЕНИЯ ГЛИЦИДНЫХ ЭФИРОВ ДИКАРБОНОВЫХ кислот | 0 |
|
SU405880A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Двухтактный двигатель внутреннего горения | 1924 |
|
SU1966A1 |
