л
Изобретение относится к радиотехнике и может, использоваться в прецизионных генераторах сигналов с частотной модуляцией в радиолокационных и связных системах, а в акусто электронных фурье-процессорах.
Целью изобретения является повышение быстродействия.
На фиг. 1 представлена структурна схема предложенного датчика сигнала ошибки; на фиг . 2а и 2 -примеры выполнения блока компенсации шумов дробности.
Датчик сигнала ошибки содержит .опорный генератор 1, делитель 2 частоты, блок 3 памяти, делитель частоты с переменным коэффициентом деления (ДПКД) 4, первый счетчик 5, второй счетчик 6, блок 7 исключения импульсов , блок 8 компенсации шумов дробности.
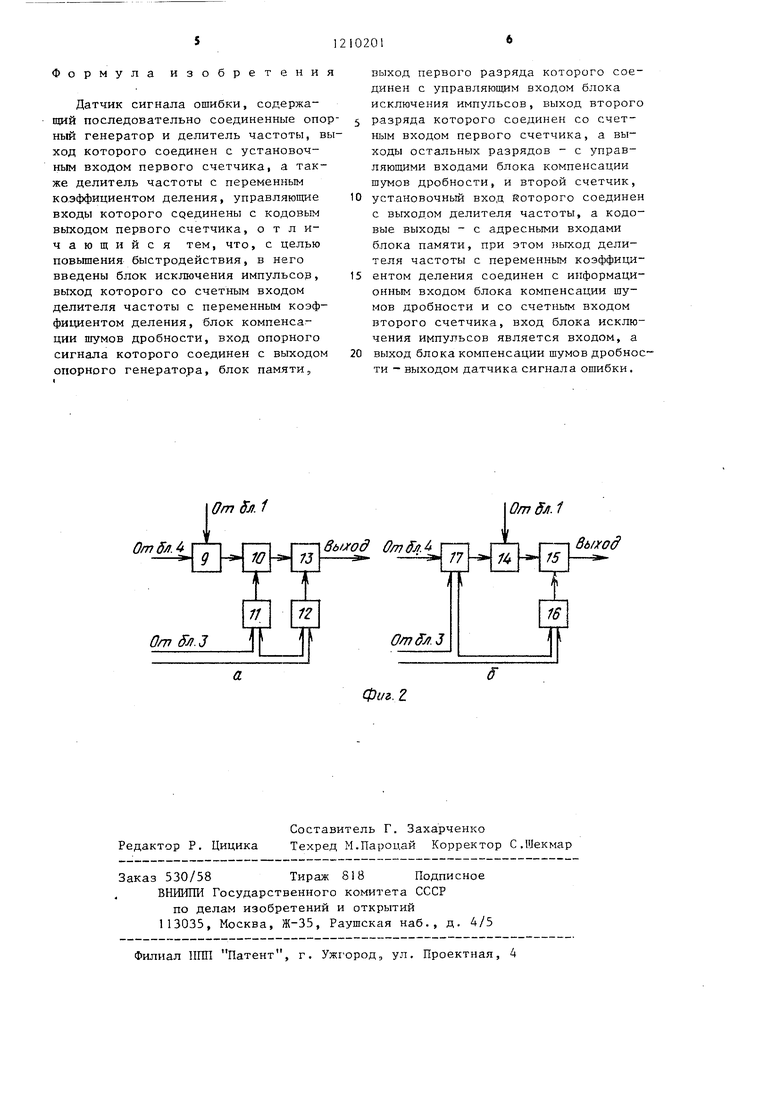
, Блок 8 компенсации шумов дробности согласно фиг 2 а содержит, фазовый детектор 9, перемножитель 10, цифро- аналоговые преобразователи. (ЦАП) 11 и 12 и сумматор 13 и согласно фиг. 2 - фазовый детектор 1А, перемножитель 15, ЦАП I6 и линию 17 задержки.
Датчик сигнала ошибки ра.ботает следующим образом.
На вход измерителя сигнала ошибки поступает сигнал вида
U(t)Ll6in 0(ih(t (1)
где (t) - отклонение фазы от требуемого закона ее изменения О (t), которое необходимо на выходе датчика сигнала ошибки. В частном случаев когда закон изменения частоты входного сигнала линейный, т.е.
.wit) 2 niH + Ui),
где f., - начальная частота ЛЧМ сиг-
п
нала; v v/T - скорость изменения частоты; w - девиация частоты; Т - длительность линейно-частотно-модулированного (ЛЧМ) сигнала, требуемая фаза имеет вид
9(y) 2 «(%ijio,,y ), (2) 1„ / i,p
к J 1 J I t
- начальный коэффициент деления ДПКД 4;
K.W/CTF ) - код скорости частотной модуляции ЧМ;
210201
р
- нормированное
время; - частота сравнения , на которой
происходит преобразование ЛЧМ сигнала (на частоте FJ, работает входящий в
блок 8 компенсации шумов дробности фазовый детектор 9 (14). Текущий коэффициент деления К., вычисляемьм в соответствии с выражением
(y..9ei/- 0,5K,K - (к-0 )-о,5 Ку (км) ,
где К 0,1, 2,..,, опредео1яет моменты Y|, появления импульсов на выходе последовательно включенных блока 7 исключения импульсов и ДПКД 4. Значения У в соответствии с формулой (2) находятся из уравнения
)€j LjK + o,5Kyij,--en-L(fc +0,5 Kyk).
Здесь и далее ent(.) означает выделение целой части числа. Фаза (2) входного сигнала U (t) в моменты времени кратна 2 и связана с 0 , J неравенством
e60(K)-0i;t. 21Г,
Знак равенства соответствует случаю, когда э& К1-0,5Ку1 целое, число для любых значений К., При этом импульсы на выходе последовательно включенных блока 7 исключения импульсов и ДПКД 4. следуют через промежутки времени, равные периоду Т 1/Р.,, следования импульсов в выхода опорного генератора 1.
Именно этот случай при К.0 соответствует режиму вьщеления сигнала ошибки, при котором преобразование входного ЛЧМ сигнала на частоту F
Cf
осуществляется посредством деления частоты ЛЧМ сигнала на целочисленный коэффициент деления К,, который от выборки к выборке меняется на целое число единиц (обычно шаг коэф- фициента деления равен единице). При режиме с целочисленным коэффициентом деления частота сравнения РГГ, 6 W/T и сигнал ошибки может выделиться не чаще, чем один раз за время Тф 1 /FJ, , что обуславливает низкое быстродействие.
В предложенном датчике сигнала ошибки коды Кг и К., могут принимать
И
нецелочисленные значения, в результате чего частота сравнения F,-. может быть выбрана много большей, чем fw/Vj причем существенно возрастает быстродействие.
Однако, из-за того, что коды К,
у, а следовательно и код K,f К +
К
+ 0,5Ку К нецелочисленны, импульсы на выходе последовательно включенны блока 7 исключения импульсов и. ДПКД 4 даже при строгом соблюдении закон изменения фазы (2) неэквидистантны ЧТО является причиной возникновения шумов дробности (систематических ошбок ).
Присутствие фазовых отклонений (t) приводит к тому, что импульсы на выходе ДПКД 4 появляются в моменты времени, , отличные от д, . Подставляя К - (/2/2 /г в равенство (У Л(У 0
SlT.entlK K+o.), решая полученное уравнение относительно у в предположении, что отклонения фазы -5(t) от желаемого закона фазы (2) невелики, получаем
где S
Ч i крутизна дискриминационной
характеристики; Kg, К К +
. -. 7 ./..
.2ч
+ 0,5Kv К -ent(,5K К) К ,Kf i -t-КуК - текушдй код частоты.
В (З) первое слагаемое пропорционально измеряемым фазовьм ошибкам -(t) во входном сигнале (J(t), а второе представляет собой систематическую погрешность измерения, обусловленную дробностью коэффициента деления.
Датчик сигнала оЕПибки должен формировать на своем выходе напряжение
е,к;)« 6(t;). (4)
в силу того, что характер изменения кодов К.{ и K(j, в зависимости от К известен, становится возможным обеспечить переход от (3) к (4). Это осуществляется в блоке 8, в котором производится компенсация шумов дроб1020
ности и сравнение преобразованной импульсной последовательности (с выхода ДГГКД 4) с эталонной, пос- тупаюш;ей от опорного генератора
5 1.
Когда На выходе делителя 2 частоты присутствует низкий уровень напряжения, на выходе первого счетчика 5 формируется код начальной
10 частоты K , определяющий начальный коэффициент деления ДПКД 4. При этом из блока 3 памяти по нулевому адресу извлекаются нулевые управляющие сигналы, которые поступают на
15 управляющий вход блока 7 исключения импульсов и блока 8 компенсации шумов дробности. Когда уровень напряжения на-выходе делителя 2 частоты изменяется, первый и второй счетчи20 ки 5 .и 6 переходят в счетный режим, причем второй счетчик 6 по импульсам с выхода ДПКД 4 формирует код адреса для обращения к блоку 3, памяти, а первый счетчик 5 по импуль25 сам, извлекаемым из блока 3 памяти, формирует код деления ДПКД 4 Кд entK. Поскольку команда на исключение импульсов при смене адреса из блока 3 памяти поступает не в каж3Q дом такте, код деления частоты последовательно соединенных блока 7 исключения импульсов и ДПКД 4 ока- зывается дробньм. Эти ошибки дробности устраняются в блоке 8, на который из блока 3 памяти поступает многоразрядный код управления.
35
В блоке 8 (фиг. 2q) выходное напряжение фазового детектора 9 умно40 жается сначала в перемножителе 10 на преобразованный к аналоговому виду код частоты К, а затем в сумматоре 13 к нему добавляется преобразованный к аналоговому виду код
45 фазы- К(. Преобразование кодов К и К ц, осуществляется соответственно в ЦАП 11 и 12. В блоке 8 компенсации (фиг. 25) ошибки дробности снижаются за счет введения до фазового де50 тектора 14 линии 17 задержки, управляемой кодом KT- , извлекаемым из блока 3 памятиТ Постоянная чувствительность к отклонению фазы к обеспечивается умножением напря55 жения с выхода фазового детектора 14 на преобразованный к аналоговому виду в ЦАП 16 код часто - ты К.{ .
Формула изобретения
Датчик сигнала ошибки, содержащий последовательно соединенные опорный генератор и делитель частоты, выход которого соединен с установочным входом первого счетчика, а также делитель частоты с переменным коэффициентом деления, управляющие входы которого срединены с кодовым выходом первого счетчика, отличающийся тем, что, с целью повышения быстродействия, в него введены блок исключения импульсов, выход которого со счетным входом делителя частоты с переменным коэф- фи1Ц1ентом деления, блок компенсации шумов дробности, вход опорного сигнала которого соединен с выходом опорного генератора, блок памяти.
выход первого разряда которого соединен с управляющим входом блока исключения импульсов, выход второго разряда которого соединен со счетным входом первого счетчика, а выходы остальных разрядов - с управляющими входами блока компенсации шумов дробности, и второй счетчик,
установочный вход которого соединен с выходом делителя частоты, а кодовые выходы - с адресными входами блока памяти, при этом })ьгх:од делителя частоты с переменным коэффициентом деления соединен с информационным входом блока компенсации шумов дробности и со счетным входом второго счетчика, вход блока исключения импульсов является входом, а
выход блока компенсации шумов дробности - выходом датчика сигнала ошибки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой синтезатор частоты | 1987 |
|
SU1515364A1 |
| Синтезатор частот | 1986 |
|
SU1394434A1 |
| Цифровой синтезатор изменяющейся частоты | 1988 |
|
SU1525861A1 |
| Синтезатор частот | 1988 |
|
SU1584105A2 |
| Цифровой синтезатор изменяющейся частоты | 1985 |
|
SU1298836A1 |
| Синтезатор частот | 1984 |
|
SU1293841A1 |
| Цифровой фазовый детектор | 1980 |
|
SU898588A1 |
| Частотный модулятор | 1989 |
|
SU1626320A1 |
| Синтезатор частот | 1986 |
|
SU1376242A1 |
| Устройство автоматической подстройки линейного закона частотной модуляции | 1984 |
|
SU1218463A1 |
Изобретение м.б. использовано в прецизионных генераторах сигналов с частотной модуляцией в радиолокационных и связных системах, в акус- тоэлектронных фурье-продессорах. Цель изобретения - повышение быстродействия. Устройство содержит опор- ный генератор 1, делитель частоты 2, блок пaмяtи (БП) 3, делитель частоты с переменным коэффициентом деления (ДПКД) 4, два счетчика 5, 6, блок исключения импульсов 7 и блок кo meнcaции шумов добротности (БКПЩ) 8. Когда уровень напряжения на выходе делителя частоты 2 изменяется, счетчики 5, 6 переходят в счетный режим, счетчик 6 по импульсам с выхода ДПКД 4 формирует код адреса для обращения в БП 3, а счетчик 5 по импульсам, извлекаемым из БП 3, формирует код деления ДПКД 4 K.ent К. Поскольку команда на исключение импульсов при смене адреса из БП 3 поступает не в каждом такте, код деления частоты последовательно соединенных блока исключения импульсов 7 и ДПКД 4 оказывается дробным. Эти ошибки дробности устраняются в БКШД 8, на который из БП 3 поступает многоразрядный код управления. Приведены два примера вьтолнения БКИЩ 8. ,2 ил. о (Л С о to фиг.1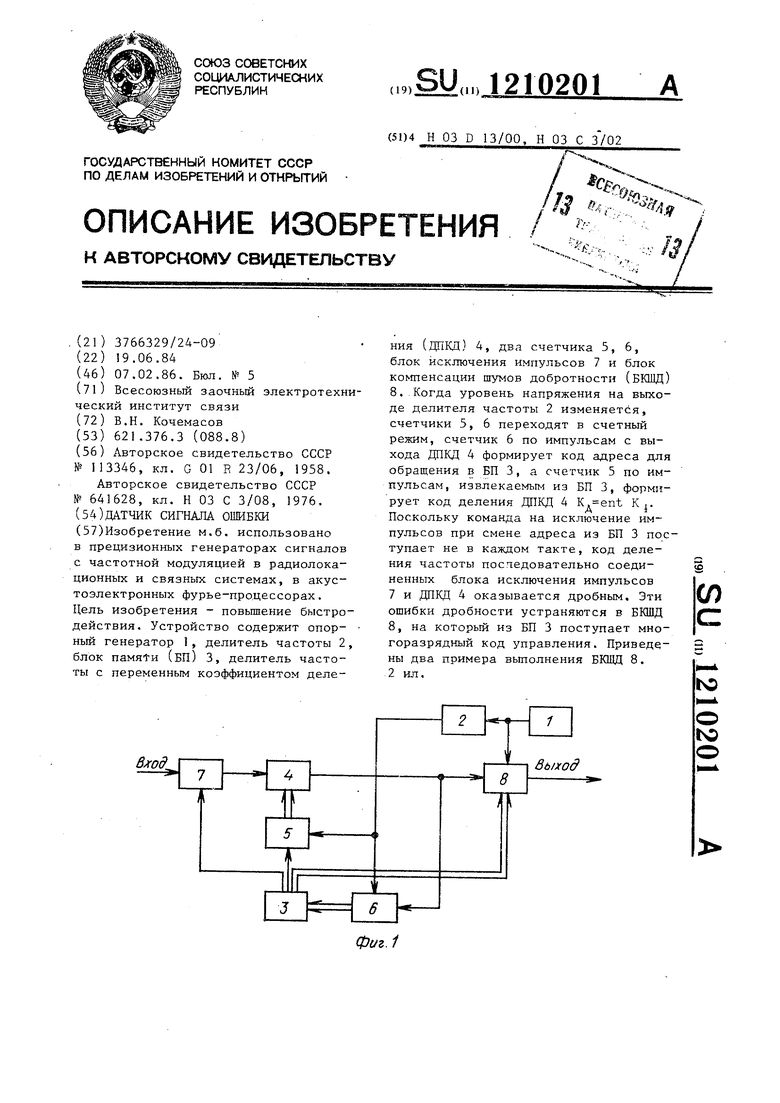
0in 5л.1
ОтблЛ
8b/jfod
вб/)од
.З
Редактор Р. Цицика
Составитель Г. Захарченко
Техред М.Пароцай Корректор С.Шекмар
Заказ 530/58 Тираж 818 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная,
фиг. Z
| Устройство для снятия характеристик электронной настройки широкополосных генераторов | 1957 |
|
SU113346A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Генератор с линейной частотной модуляцией | 1976 |
|
SU641628A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
