Изобретение относится к обработ- ке изделий при помопда вибрации и может быть использовано в атомном машиностроении и котлостроении для снятия внутренних остаточных напряжений, например, в крупногабаритных изделиях типа корпусов реакторов обечаек и др
Цель изобретения сокращение времени обработки и снятие остаточных напряжений.
С5рцйость изобретения-состоит в следующем.
Выбор рабочих частот - частот наибольшей Диссипации энергии на областях локализации макронапряжеНИИ позволяет закачивать энергию упругих :солебаний в среду изделия с большей эффективностью, так как почти вся энергия колебаний поглощается в среде изделия на указанных областях Например, .резонансные колебания поглощаются в среде изделия гораздо слабее. Выбор в качестве рабочих частот - частот максимальной диссипации позволяет закачивать энергию упругих колебаний в локальные области, т.е. воздейст- вовать на области локализации макронапряжений. Это происходит- при совпадении длины волны закачиваемых ynpyrj-rx колебаний с характеристическим размером области локализации макронагфяжений. Выбор частот максимальной диссипации в качестве рабочих частот ранее неизвестен. Корректировка частоты закачиваемых упругих колебаний в среду изделия с изменяющейся рабочей частотой позволяет поддерживать процесс зака.ч- ки энергии в область локализации макронапряжений на начальном уровне, В случае отсутствия такой корректировки происходит рассогласование длины волны закачиваемых упругих
колебаний с характеристической длиной области локализации макронапряжений, .так как процесс снятия макронапряжения приводит к изменению упругих свойств в области локализации макронапряжений, Это изменение упру гих свойств ведет к изменению харак- теристическогр размера в области локализации макронапряжений,
Критерием прекращения виброобработки на одной из рабочих частот является факт стабилизации работы. Вследствие того, что процесс снятия
остаточных напряжений приводит к изменению рабочей частоты, то факт стабилизации говорит о том, что процесс снятия напряжений прекрат ш-
ся.
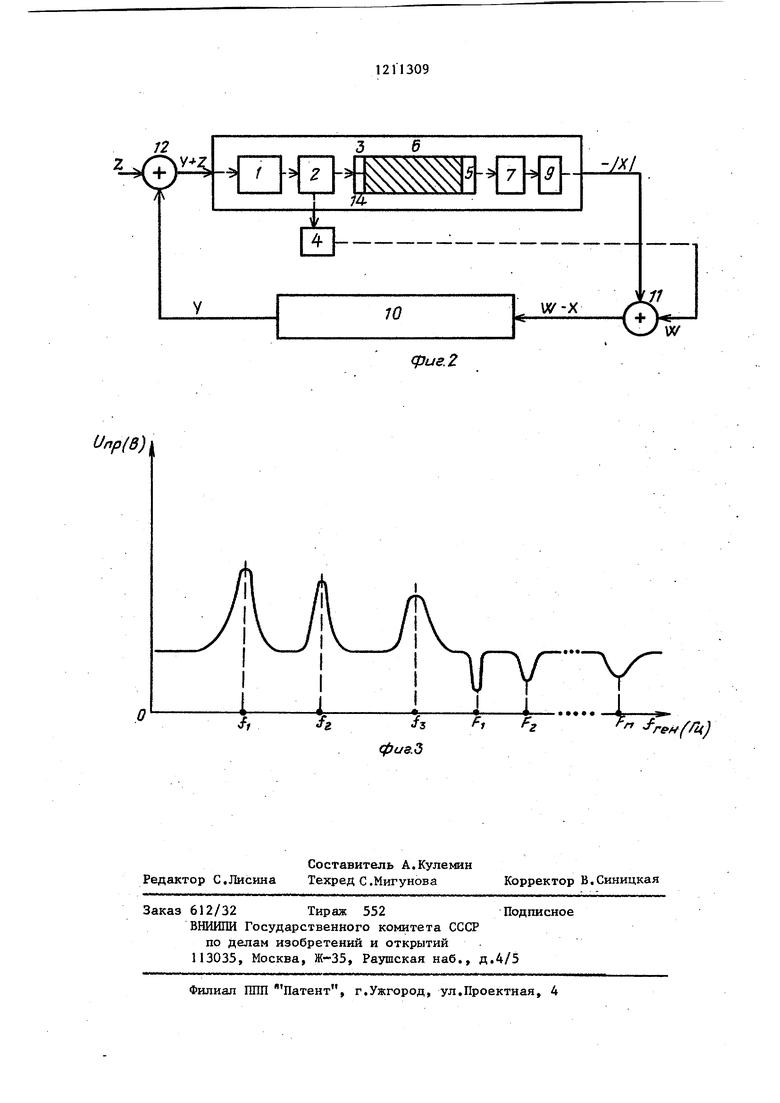
На фиг.1 изображена блок-схема устройства, реализующего способу на фиг.2 - блок-схема контура регулирования; на фиг.З - диаграмма, поясняющая способ.
Устройство содержит генератор 1, управляемый напряжением.и связанный со входом усилителя 2, один выход которого подключен к передакядему устройству 3, другой - к входу детектора 4, Передающее устройство 3 связано с приемником 5 через материал изделия 6, при этом приемник 5 соединен последовательно с усилителем 7,
один выход которого подан на регистрирующий прибор 8, например самописец, другой - на вход детектора 9« Выход последнего подключен параллельно к выходу детектора 4 и к входу
блока управления, представляющего собой настраиваемый пропорционально- интегрально-дифференциальный регулятор 10(ПИД), имекшщй в своем составе суммируюищй элемент 11, который
включен на входе и служит для формирования величины W - X, где X - регулируемая величина; W - задающий параметр - напряжение с выхода детектора 4 или от стороннего источника
сигнала, и суммирующий элемент 12, включенный на выходе регулятора 10, формирующий величину У + Z , где V регулирующее воздействие с выхода блока 10; Z - возмущающее воздейст-
вие J, которым является изменение упругих свойств среды изделия. Выход суммирующего элемента 12 подан на вход объекта регулирования (фиг,2)1, включающего в свой состав все эле-
менты устройства, кроме детектора 4, регистрирующего прибора 8, вольтметра 13, включенного на выходе регулятора 10, связанного с г.е- нератором 1 через выключатель ВК-1,
и.источника 14 ультразвуковых колебаний, контактирующего с изделием 6 со стороны передающего устройства 3. Пунктиром на фиг.2 обозначена связь, не входящая в кон-
тур регулирования.
В качестве генератора -1 может быть использован, например, генератор с расстроенным мостом ВинаРобинсона, особенностью которого является использование Полевых транзисторов в качестве управляемых сопротивлений как для стабилизации выходного напряжения, так и для плавного управления частотой генерации напряжения. Грубая перестройка генератора по частоте осуществляется спаренным блоком переменных емкостей, входящих в мост Вина-Робинсона, В качестве усилителя 2 может быть использован комплементарный имитерный повторитель в режиме АВ по схеме Дарлингтона или достаточно мощный хфомышлен- ный усилитель. Нагрузкой усилителя 2 является передающее устройство 3 злектромагнитного типа В качестве приемника 5 используется пьезокерамический преобразователь, например« иа основе сульфита лития (Li2.SO{,-.U20). Выбор типа приемника как и передатчика связан с условием, что собственные резонансные частоты приемника и передатчика должны значительно отличаться от рабочих частот. Это требование объясняется необходимостью иметь равномер ную частотно-амплитудную характерис- тику приемника и передатчика . Источником сигнала дпя усилителя 7 является пьезокерамический йфеобразова- тель 5f поэтому усилитель 7 должен- иметь большре выходное сопротивление, а ввиду малого входного сигнала - большой коэффициент усиления в рабочем диапазоне частот. С этой целью в первых каскадах усилителя 5 могут быть использованы операционные усилители серии КР544, имеющие брль- .шие входные сопротивления (типовое значение ) и большие коэффициенты усиления напряжения (К 10). Тип регистрирукяцего прибора 8 определяет структуру выходных каскадов усилителя 7, Выбор в качестве блока управления регулятора 10 типа ШЗД связано с необходимостью одновременного обеспечения двух условий; большого коэффициента усиления в контуре регулирования (); и удовлетворительной передаточной характеристики (передаточная характеристика ЭХ
при ). Так как ПИД - регулятор предполагает управляющие сигналы в постоянной форме, то в устройстве предусмотрено на
1309
личие двух детекторов 4 и 9 средних значений.
Предлагаемый способ снятия остаточ ных напряжений в изделиях осуществля5 ется следующим образом.
Определяют набор рабочих частот f ...Ph ц, (Фиг.З), в качестве которых выбирают частоты.максимальной диссипации энергии упругих коле бгшйй в материале изделия б, которая происходит на областях локализации макронапряжений. В случае совпадения длины волны вводим 1х в .изделие упругих.колебаний с характе-
V ристическими размерами области лока-
. лизации макронапряжений происходит резкое поглощение энергии на зтой частоте. Для определения набора таких частот упругик колебаний включа-
ют генератор 1 (при разомкнутом выключателе ВК1 контура регулирования)/. Пользуясь грубой перестройкой частоты с помощью блока переменных емкостей меняют частоту генерируем 1х ко-
лебаний в диапазоне от 400 Гц до
200x10 Гц, которые, выбираются из условия того, что характеристические размеры областей макронатфяжений в изделии лежат в пределах от 2х
30 до 10 м. Подставляя эти,граничные величины в известные соотно-
шения
А
-, где а - длина
волны; ССР - скорость распрострале- ния упругих колебаний в материале;
л) - частота, устанавливают указанный диапазон частот генератора. На каждой из частот диапазона 400 Гц- 200x10 Гц 4иксируют с помощью регйст- рирующего прибора 8 амплитуды напряжения УПР , т.е. снимают амплитудно- частотную характеристику nv f С) канала передающее устройство 3 - изделие 6 - приемник 5. Ввиду того, что переданяцее устройство 3 имеет равномерную частотно-амплитудную характеристику в рабочем диапазоне частот, коэффициент передачи
tr - Ригии.утр. А у
Кпер.- Const
ПерК ЮУЦ -ЖТР. V Ollelприемного устройства. Kpej. совпадает в точность до Const с Напряжением приемного устройства. Это оёстоя- тельство позволяет измерять не коэффициент передачи, а выходное напряжение приемника 5 (УЛР) . Полученная частотно-амплитудная характеристика iVnp «f (F). включает в себя, как / резонансные максимуг ы f ,f,j ,... f, соответствующие .минимальному поглощению энергии упругих колеба- 5 НИИ, так и минимугФ, соответствующие максимальному поглощению энергии колебаний в областях локализации макроиапрякеиий (фиг.З). Частоты Г ,.,.,F на которых Ю наблюдается максимальное поглощение энергии упругих колебаний, принимаются за рабочие частоты.
Далее гфоизводится закачка энергии упругих колебаний, воэбухг 15 даемых генератором 1, в материал изделия 6 на рабочих частотах , ..., РЙ в процессе которой
происходит снятие остаточных напря- I жений в изделии,.Так, установив 20 частоту генерируемых колебаний равной Р , вводят упругие колебания в изделия на этой частоте, предварительно замкнув ключ ВК1 ,т.е. вклю- 1 чив в действие контур регулирова- ния (обратную связь). Необходимость этого связана с тем, что диссипация энергии в области, которой соответствует частота FY приводит к релаксаг(ии макронапряжений - изменению упругих свойств материала, и как следствие, к изменению рабочей частоты этой области, которая уже не совпадает с частотой F генератора 1, Назначение контура регули- 35 рования состоит в поддержании на заданиом уровие W определенной физической величины X (регулируемой величины). В рассмотренном случае X - напряжение, снимаемое с выхода детек-40 тора 9;W напряжение, получаемое после детектора 4. Это напряжение постоянно. Регулятор 10 управляет велл1чиной X посредством плавного изменения частоты генератора I. Ее- ли регулируемая величина X превышает заданное значениеW , разность
30
5
5
0 5
0
W X становится отрицательной. Вслед-- ствие этого регулирующее воздействие Y уменьшается соответственно в увеличенном масштабе, так как регулятор 10 имеет определенный коэффициент усиления. Это приводит к воз-, врату регулир гемой вел нчины X к пер-- воначальному значению, задаваемому величиной W . Контролируя изменения напряжения на выходе ПИД.регуля- тора вольтметром 13, однозначно определяют момент t , после которого выходное напряжение регулятора не меняется. Это свидетельствует о том, что процесс релаксации макронапряже- кий на частоте-; f прекратился и дальнейшая виброобработка на этой частоте нецелесообразна..Переходят на следующую рабочую частоту f -и в изложенном выше варианте снимают напряжения на частоте F , Перебирая весь набор рабочих частот F, ... ц РМЙ снимают напряжения в изделии. В целях увеличения эффективности снятия напряжений в течение всего процесса использзпот ультразвуковые колебания от источника 1А, которые увеличивают подвижность дислокаций. Эти колебания накладываются на изделия как в процессе определения рабочих частот, так и в процессе снятия макронапряжений.
Пример. Предлагаемый способ снятия внутренних остаточных напряжений проверялся в лабораторных ловиях на изделиях со сварными соединениями, имеющими ширину, сварного шва 2-10 м. В результате опробования удалось определить две рабочие частоты F 180 10 Гц и Г 60 х X Ш , Снятие напряжений на этих частотах предлагаемым способом по сравнению с базовым способом повышается на 10-15%, время виброобработки уменьшается на 30-40%.
12
чэ
UnpfB)
10
U/-J
KJ
Vl/iv
фиг. 2


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ снятия остаточных напряжений в металлических конструкциях и устройство для его осуществления | 1987 |
|
SU1474175A1 |
| Устройство для контроля целостности строительных изделий | 1988 |
|
SU1527575A1 |
| Способ обработки металлических конструкций | 1987 |
|
SU1444361A1 |
| Способ виброобработки конструкции для снижения остаточных напряжений и устройство для его осуществления | 1987 |
|
SU1421784A1 |
| Вибрационная установка для снижения уровня напряжений и стабилизации размеров деталей и конструкций | 1982 |
|
SU1076465A1 |
| Способ снятия внутренних напряжений в деталях вибрацией | 1988 |
|
SU1694659A1 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ДАТЧИКА С ВИБРИРУЮЩИМ ЭЛЕМЕНТОМ | 2006 |
|
RU2319121C1 |
| ДОПЛЕРОВСКИЙ УЛЬТРАЗВУКОВОЙ ЛОКАТОР | 1991 |
|
RU2065289C1 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ДАТЧИКА С ВИБРИРУЮЩИМ ЭЛЕМЕНТОМ | 2006 |
|
RU2318193C1 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ДАТЧИКА С ВИБРИРУЮЩИМ ЭЛЕМЕНТОМ | 2006 |
|
RU2322652C1 |

i
Составитель А.Кулемин Редактор С.Лисина Техред с.Мигунова Корректор В.Синицкая
Заказ 612/32 Тираж 552Подписное
ВНИИПИ Государственного комитета СССР
по Делам изобретений и открытий 113035, Москва, , Раушская наб., д.4/5
Филиал ШШ Патент, г.Ужгород, ул.Проектная, 4
F,
i- -t-
J
reff
{Гц)
| Способ снятия остаточных напряжений в деталях | 1980 |
|
SU899678A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ снятия остаточных напря-жЕНий ВибРАциОННОй ОбРАбОТКОй | 1979 |
|
SU804699A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
