2. Манипулятор по п. 1, о т л и ч а - ю ш и и с я тем, что захватное устройство выполнено антропоморфным, причем на основании захватного устройства закреплены своими концами С-образные двуслойные пластины, а соседние пластины связаны между собой соединительными злементами из теп- лозлектроюоляционнрго материала, причем соединительные- злементы каждой последуюИзобретение относится к машиностроению, в частности к манипуляторам.
Целью изобретения является расширение технологических возможностей за счет улучшния маневренности.
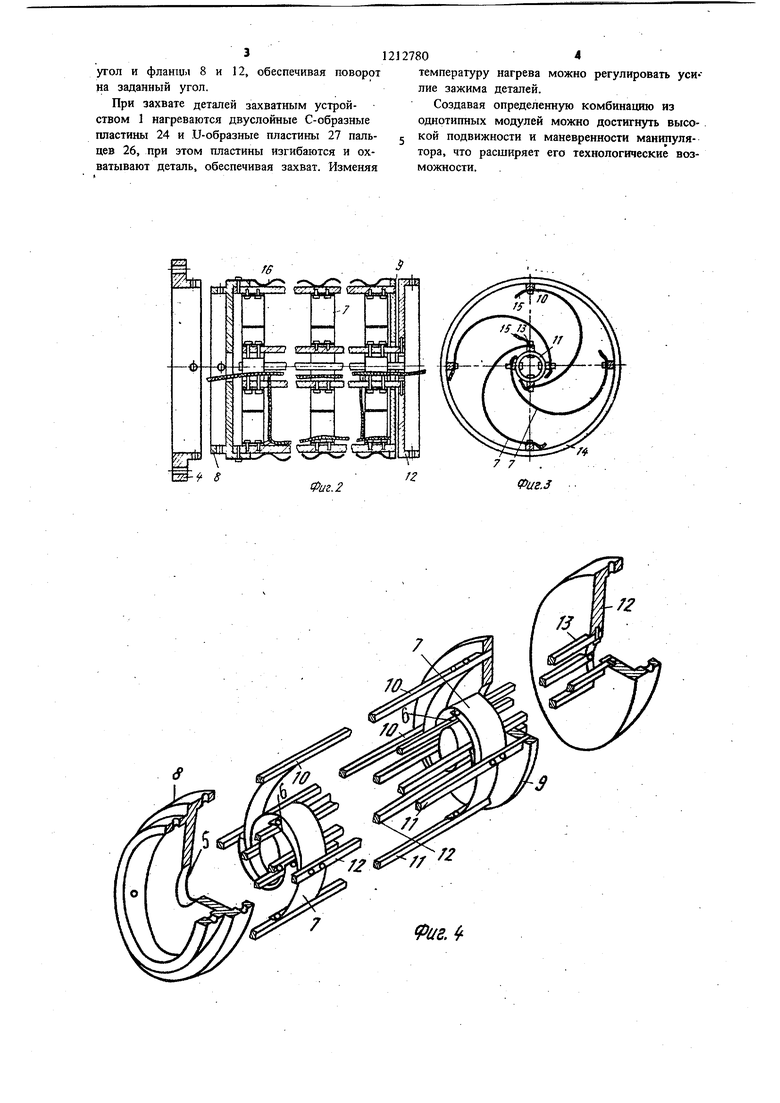
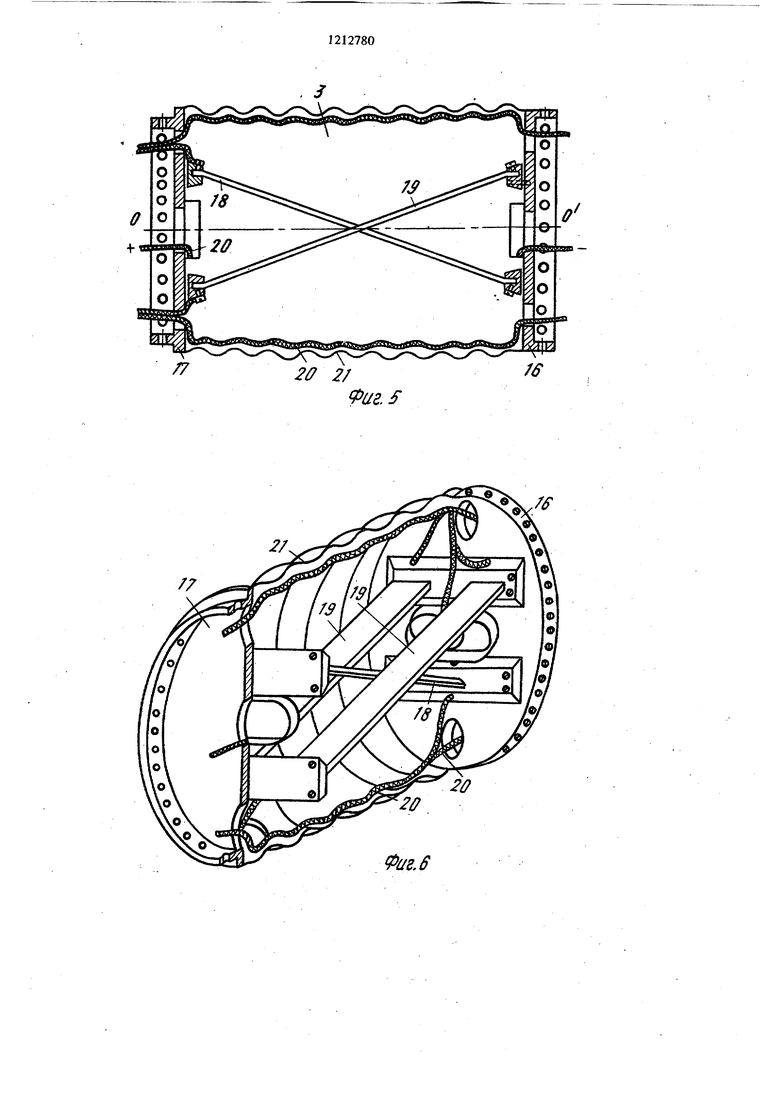
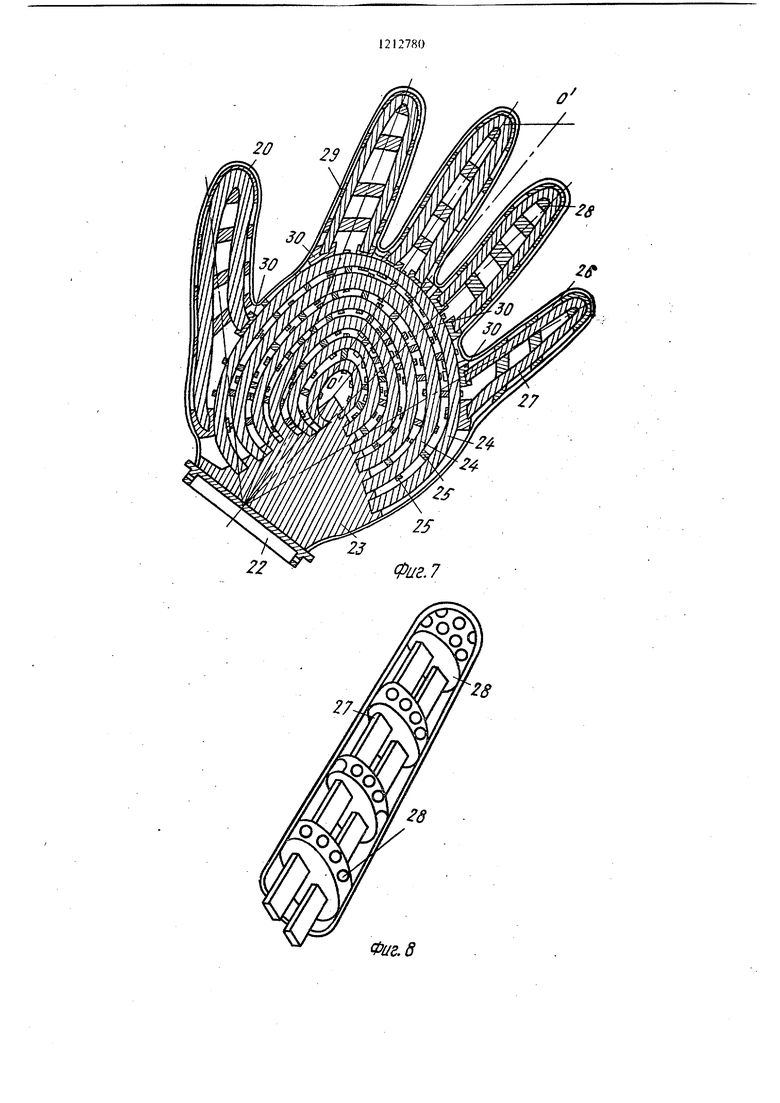
На фиг. 1 изображен манипулятор, общий вид на фиг. 2 - модуль вращения, продольный разрез; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - изображение составных частей модуля вращения; на фиг. 5 - мо- дуль изгиба, продольный разрез; на фиг. 6 то же, общий вид; на фиг. 7 - захватное устройство, разрез; на фиг. 8 - палец, общий вид; на фиг. 9 - - работа двуслойной U-образной пластины пальца.
Манипулятор содержит захватное устройство 1, модуль 2 вращения, модуль 3 изги- ба, переходной фланец 4, образующие механическую руку. Модуль 2 вращения включа- ет два каркаса - внешний 5 и внутренний 6, соединенные между собой двуслойными пластинами 7 с разным коэффициентом линейного вращения. Причем внещций каркас 5 образован из двух фланцев 8 и 9 стерж- ней 10, причем фланец 9 выполнен с от- верстием для размещения внутреннего каркаса 6, а фланец 8 служит для соединения модулей меясду собой. Внутренний каркас 6 образован двумя фланцами 11 и 12 и стержнями 13, причем фланец 12 служит для сое динения модулей между собой. Двуслойные пластины 7 крепятся к соответствующим стержням 10 и 13 каркасов 5 и 6. Модуль закрывается кожухом 14. Электропитание к двухслойным пластинам осуществляется при помощи проводов 15.
Модуль В изгиба выполнен в виде двух фланцев 16 и 17 соединенных между собой при помощи двуслойных пластин 18 и 19 с разным козффициентом линейного расширения, причем зти двуслойные пластины 18 и 19 расположены в двух пересекающихся
щей ггары пластин смещены относительно со- еДинительного злемента предыдущей пары, при зтом каждый конец пластины выполнен в виде U-о бразной двуслойной пластины, своими концами закрепленной на внешней С-образной пластине, а боковые стороны U-образной пластины связаны при помощи соединительных злементов из тепло- злектроизолядионного материала.
плоскостях. Электропитание .к пластинам подводится посредством проводов 20, модуль закрыт чехлом 21.
Захватное устройство 1 включает жестко связанные между собой фланец 22 и основание 23, причем на основании закреплены С-образные двуслойные пластины 24, соединенные между собой соедршительными злементами 25 из теплоэлектроизоляционного материала, на внешней С-образной пластине 24 закреплены пальцы 26, вьшолненные в виде U-образной пластины 27, боковьге стороны зтой U-образной пластины соединены между собой при помощи соединительных элементов 28 из теплоэлектроизоляционного материала. Захватное устройство закрыто чехлом 29. Пальцы 26 закреплены на С-образн ой пластине 24 посредством промежуточных злементов 30 из теплозлектроизоляционного материала.
Манипулятор работает следующим образом.
Все модули манипулятора соединяются между собой посредством фланцев 8, 12, 16, 17 и 22 .Для обеспечения изгиба механической руки подается электрическое напряжение на модуль 3 изгиба, прохождение электрического тока вызывает нагрев двуслойных пластин 18 и 19, за счет разных коэффициентов линейного расширения пластины 18 и 19 изгибаются и тем самым вызывают взаимное угловое перемещение фланцев 16 и 17.
Поворот модуля вращения происходит следующим образом.
При нагреве двуслойных пластин 7 они изгибаются за счет чего изменяется расстояние между крайними точками каждой пластины, в результате чего меняется взаимное угловое положение каркасов 5 и 6, соответ- ,ственно поворачиваются на определенный
утоп и фланЩ) 8 и 12, обеспечивая поворот на заданный угол.
При захвате деталей захватным устройством 1 нагреваются двуслойные С-о6разные пластины 24 и U-образные пластины 27 пальцев 26, при этом пластины изгибаются и охватывают деталь, обеспечивая захват. Изменяя
температуру нагрева можно регулировать усилие зажима деталей.
Создавая определенную комбинацию из однотипных модулей можно достигнуть высокой подвижности и маневренности манипулятора, что расширяет его технологические возможности.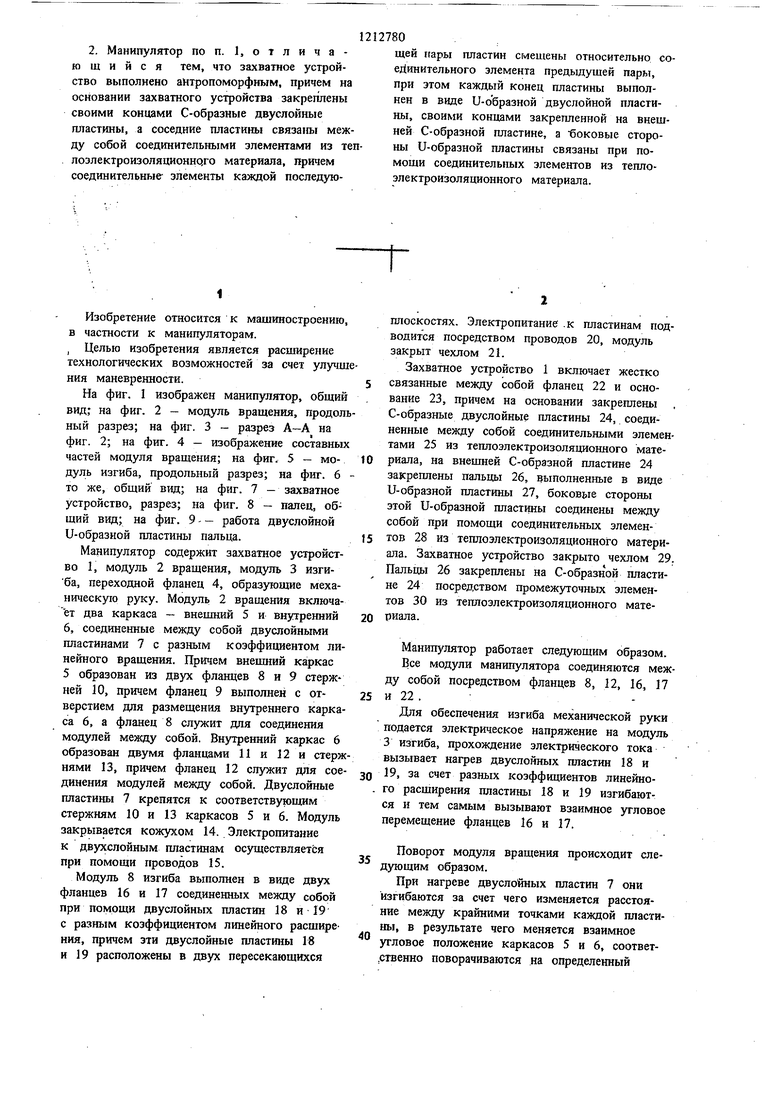
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБОРОТНЫЙ ПЕНАЛ ВРЕМЕННОГО ХРАНЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2012 |
|
RU2493622C1 |
| УСТАНОВОЧНАЯ СИСТЕМА ДЛЯ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2015 |
|
RU2700293C2 |
| Исполнительный орган манипулятора | 1984 |
|
SU1194669A1 |
| Манипулятор | 1987 |
|
SU1648759A1 |
| Запястье манипулятора | 1990 |
|
SU1754440A1 |
| ДЕРЖАТЕЛЬ ЭЛЕКТРОННОГО УСТРОЙСТВА (ВАРИАНТЫ) | 2015 |
|
RU2683709C2 |
| Звено-модуль руки манипулятора | 1984 |
|
SU1194668A1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| ДЕРЖАТЕЛЬ ЭЛЕКТРОННОГО УСТРОЙСТВА (ВАРИАНТЫ) И ЭЛЕКТРИЧЕСКИЙ РАЗЪЕМ ДЛЯ НЕГО | 2015 |
|
RU2697641C2 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА БЕСКАМЕРНОЙ ШИНЫ НА ОБОДЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2428321C2 |

1. Манипулятор, содержащий механическую руку, выполненную в виде соединенных между собой модулей изгиба и вращения, содержащих элементы изменяемой формы, и захватное устройство, отличающийся тем, что, с целью расширения технологических возможностей за счет улучшения маневренности, элементы изменяемой формы выполнены в виде двуслойных пластин с разным коэффициентом линейного расширения, соединенных, между собой при номощи соединительных элементов, выполненных в виде фланцев из теплоэлектроизоля- ционного материала, причем в модулях изгиба двуслойные пластины расположены между фланцами в двух взаимно пересекающихся плоскостях, модуль поворота выполнен в виде двух коаксиально расположенных каркасов, каждый из которых образован стержнями, расположенными по окружности между двумя фланцами, причем один из фланцев каждого каркаса связан с соответствующим соединительным элементом, а соответствующие стержни обхватывающего и обхватываемого каркасов соединены между собой двуслойными пластинами, плоскости изгиба которых перпендикулярны стержням. / /
.
/#
Фиг.З
7
Фиг.
Фаг.
27
/7
/
2ff
2ff
Фа г. 6
23
/
27
4
S
2S
Фиг. 7
27
Фиг. 8
//
, f/V, // ,1/
/
4
иг.З
Редактор Г. Волкова Заказ 705/23
Составитель А. Алексеев Техред АЛСикемезей
Тираж 1030 ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушскай наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
Корректор В. Бутяга Подписное
| Манипулятор с программным управлением | 1978 |
|
SU688329A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
