-ч ел
4 -N
Изобретение относится к робототехнике, в частности к устройствам соединения руки манипулятора с захватным устройством, и может использоваться в промышлен- ных роботах, предназначенных для перегрузки и транспортировки изделий.
Известны конструкции запястья манипулятора, содержащие корпус руки, платформу с захватом, связанные между собой шарнирно одним центральным стержнем и по крайней мере тремя вспомогательными стержнями, причем центральный стержень шарнирно связан с тягами силовых устройств, которые закреплены на корпусе руки.
Недостатки указанных конструкций - отсутствие податливости платформы и корпуса при их относительных угловых смещениях, а также ограниченные функциональные возможности.
Известны конструкции запястья манипулятора, предназначенные для извлечения изделий из технологических участков, в котором траверса с захватными лапами соединена с рукой манипулятора Г-образными пружинами, работающими в горизонтальной плоскости.
Недостатки таких конструкций - ограничение податливости в вертикальном направлении, а также и при относительных угловых перемещениях траверсы и руки манипулятора. Это приводит к ограничению функциональных возможностей запястья манипулятора.
Наиболее близким по технической сущности к изобретению является упругое запястье робота, содержащее фланцы для крепления захватного устройства и руки манипулятора, связанные между собой упругими элементами в виде стержней одинаковой длины и центральной тягой со сферическими шарнирами и пружиной сжатия.
Недостатком этой конструкции является отсутствие податливости в направлении тяги, что приводит к возникновению значительных динамических нагрузок. Это происходит как при подъеме изделия в момент выборки зазоров в приводе (ударная нагрузка), так и гНри транспортировке, например, из-за неровностей пути (вибрация), что приводит к снижению скорости перемещения, а следовательно, и быстродействия манипулятора (робота).
Кроме того, наличие значительных динамических нагрузок на объект манипулирования снижает функциональные возможности манипулятора из-за ограничения нагрузок, допустимых для объекта манипулирования при транспортировке.
Цель изобретения - расширение функциональных возможностей, а также повышение быстродействия за счет снижения динамических нагрузок на объект манипулирования только при подъеме, но и при его транспортировании путем повышения податливости запястья манипулятора.
Указанная цель достигается тем, что запястье манипулятора, содержащее фланцы
крепления захватного устройства и руки манипулятора, упругие элементы и тягу, установленные между этими фланцами, снабжено дополнительными тягами, выполненными вместе с Названной тягой в виде
стержней одинаковой длины, и упругими шарнирами, соединяющими эти тяги с названными фланцами, причем указанные упругие элементы выполнены в виде пружин сжатия, установленных соосно с тягами.
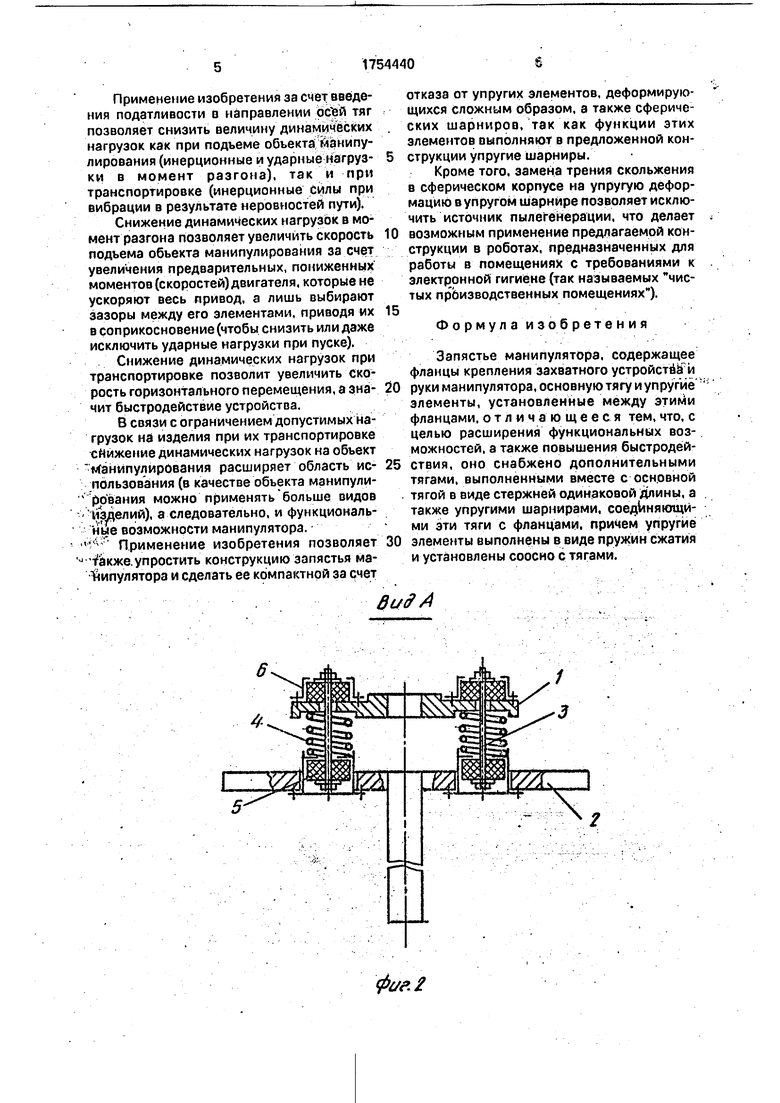
На фиг.1 представлена конструктивная схема запястья манипулятора; на фиг.2 - вид А на фиг.1; на фиг.3.4,5 - схема взаимного положения изделия, фланцев крепления, руки манипулятора и захватного
устройства при различных видах нагрузки. Запястье манипулятора содержит (фиг. 1,2) фланец 1 крепления руки манипулятора, фланец 2 крепления захватного устройства, тяги 3, установленные между
фланцами 1 и 2, упругие элементы 4, установленные между фланцами 1 и 2 и препятствующие их сближению, упругие шарниры 5, соединяющие концы тяг 3 с фланцами 1 и 2, корпуса 6, предназначенные для закрепления упругих шарниров 5, выполненных, например, в виде резиновых втулок, установленных в корпусе б без зазоров.
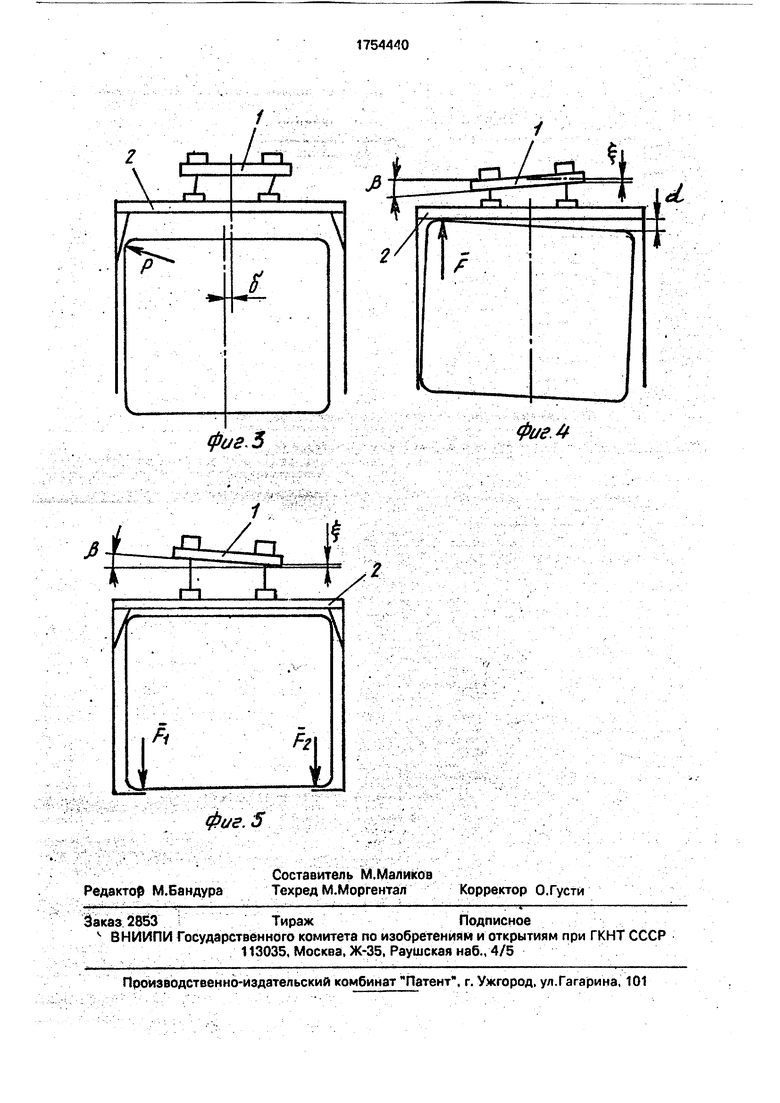
При взаимодействии с объектом манипулирования запястье манипулятора дает
возможность самоустановки захватного устройства относительно объекта манипулирования на горизонтальной поверхности при наличии погрешности позиционирования 5(фиг.З).
При этом фланцы 1 и 2 под действием внешней силы Р перемещаются в параллельных плоскостях друг относительно друга, что сопровождается поворотом тяг 3 и
деформацией шарниров 5.
Кроме того имеется возможность компенсировать взаимные угловые a,ft (фиг.4) и линейные перемещения как при сближении фланцев 1 и 2, под действием внешней
силы F, когда деформируются упругие элементы 4 и упругие шарниры 5, так и при удалении фланцев 1 и 2 (фиг.5) под действием внешних сил FI и F2, когда деформируются шарниры 5.
Применение изобретения за счет введения податливости в направлении осТей тяг позволяет снизить величину динамических . нагрузок как при подъеме объекта манипулирования (инерционные и ударные нагруз- 5 ки в момент разгона), так и при транспортировке (инерционные силы при вибрации в результате неровностей пути).
Снижение динамических нагрузок в момент разгона позволяет увеличить скорость 10 подъема объекта манипулирования за счет увеличения предварительных, пониженных моментов (скоростей) двигателя, которые не ускоряют весь привод, а лишь выбирают зазоры между его элементами, приводя их 15 в соприкосновение (чтобы снизить или даже исключить ударные нагрузки при пуске).
Снижение динамических нагрузок при транспортировке позволит увеличить скорость горизонтального перемещения, а зна- 20 чит быстродействие устройства.
В связи с ограничением допустимых нагрузок на изделия при их транспортировке снижение динамических нагрузок на объект Манипулирования расширяет область ис- 25 пользования (в качестве объекта манипули- ро вания можно применять больше видов изделий), а следовательно, и функциональные возможности манипулятора. N; Применение изобретения позволяет 30 акже упростить конструкцию запястья ма- ипулятора и сделать ее компактной за счет
отказа от упругих элементов, деформирующихся сложным образом, а также сферических шарниров, так как функции этих элементов выполняют в предложенной конструкции упругие шарниры.
Кроме того, замена трения скольжения в сферическом корпусе на упругую деформацию в упругом шарнире позволяет исключить источник пылегенерации, что делает возможным применение предлагаемой конструкции в роботах, предназначенных для работы в помещениях с требованиями к электронной гигиене (так называемых чистых производственных помещениях).
Формула изобретения
Запястье манипулятора, содержащее фланцы крепления захватного устройства и руки манипулятора, основную тягу и упругие элементы, установленные между этими фланцами, отличающееся тем, что, с целью расширения функциональных возможностей, а также повышения быстродействия, оно снабжено дополнительными тягами, выполненными вместе с основной тягой в виде стержней одинаковой длины, а также упругими шарнирами, соединяющими эти тяги с фланцами, причем упругие элементы выполнены в виде пружин сжатия и установлены соосно с тягами.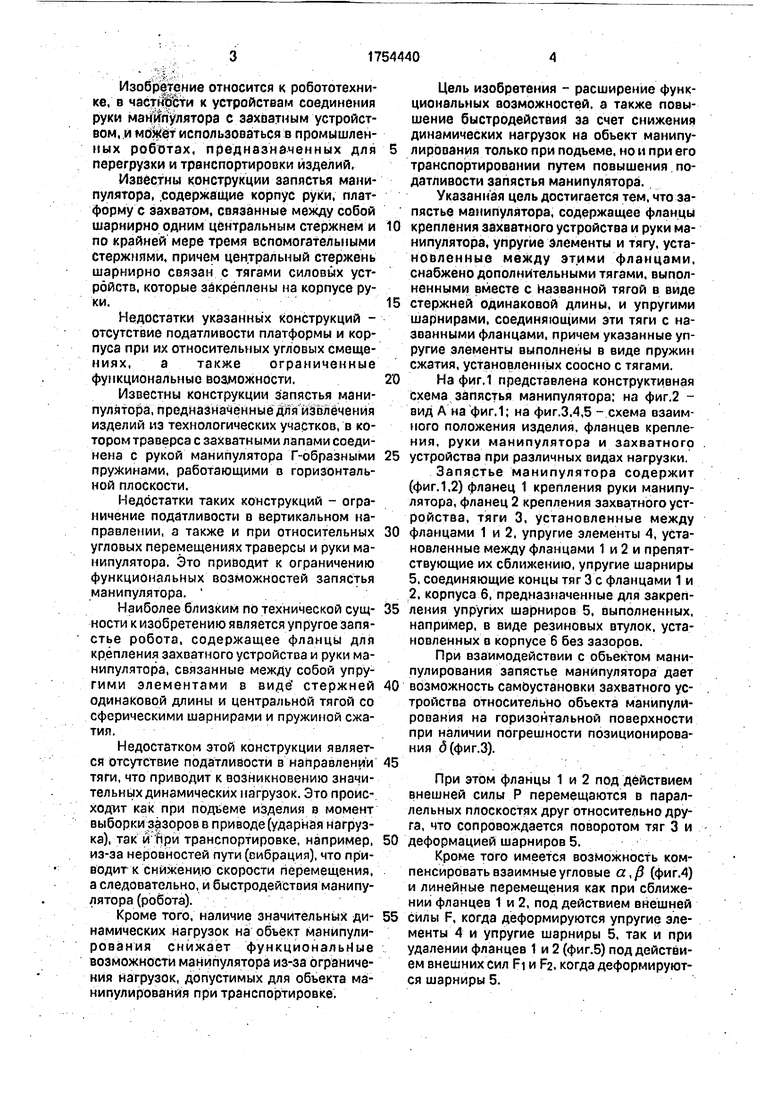
| название | год | авторы | номер документа |
|---|---|---|---|
| Упругое запястье робота | 1986 |
|
SU1371901A1 |
| Сельскохозяйственный робот-комбайн | 2019 |
|
RU2728225C1 |
| ПРОМЫШЛЕННЫЙ МОДУЛЬ | 2003 |
|
RU2248267C1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА БЕСКАМЕРНОЙ ШИНЫ НА ОБОДЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2428321C2 |
| Запястье манипулятора | 1980 |
|
SU931469A1 |
| Механическая рука манипулятора | 1986 |
|
SU1440710A1 |
| Механическая рука манипулятора | 1986 |
|
SU1400881A1 |
| Очувствленное запястье руки робота | 1985 |
|
SU1355486A1 |
Использование: робототехника, в частности устройства соединения руки манипулятора с захватным устройством, промышленные работы, предназначенные для перегрузки и транспортирования изделий. Сущность: запястье содержит фланец 1 крепления руки и манипулятору и фланец 2 крепления захватного устройства к фланцу 1 посредством тяг 3, установленных между фланцами 1 и 2 и препятствующих их сближению. Упругие шарниры 5, соединяющие концы тяг 3 с фланцами 1 и 2, обеспечивают компенсацию угловых смещений фланцев и динамических нагрузок на объект манипулирования. 5 ил. (Л С
ви#А
pa
- /
фие.2
/
фиг.З
1
и
Фиг. 4
| В. И. Смирнов,А. М. Альховский и Р. А. БаскаковКалининский политехнический институт | 0 |
|
SU358122A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Заявка ФРГ Мг 3620391, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Упругое запястье робота | 1986 |
|
SU1371901A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
