2.Звено-модуль по п.1, отличающееся тем, что измерительное устройство содержит установленные в корпусе, жестко связанном
с одним из соединительных фланцев, датчик угла поворота, шкив, закрепленный на выходном валу датчика, и гибкий элемент, охватываюпщй шкив, первый конец которого через упругий элемент закреплен на этом соединительном фланце, а второй - на другом соединительном фланце.
3.Звено-модуль по п.1, о т л ичающееся тем, что измерительное устройство содержит датчики деформации, например, тензометрические, закрепленные на плоских пружинах,
4.Звено-модуль по. п.1,. о т л И« чающееся тем, что измерительное устройство содержит кронштейн, установленный на одном из соединительных фланцев, датчик линейного
94668
перемещения, включающий корпус, жестко связанный с кронштейном, шток, установленный внутри корпуса, один конец которого подпружинен к этому соединительному фланцу, и гибкий элемент, взаимодействующий с кронштейном для его направления, первый конец которого закреплен на свободном конце штока, а второй на другом соединительном фланце.
5. Звено-модуль по п.1, отличающееся тем, что измерительное устройство содержит кронштейн, установленный на одном из соединительных фланцев, и датчик линейного перемещения, включающий корпус, жестко связанный с кронштейном, и шток, установленный в корпусе, один конец которого подпружинен к этому соединительному фланцу, а свободньй взаимодействует с другим соединительным фланцем.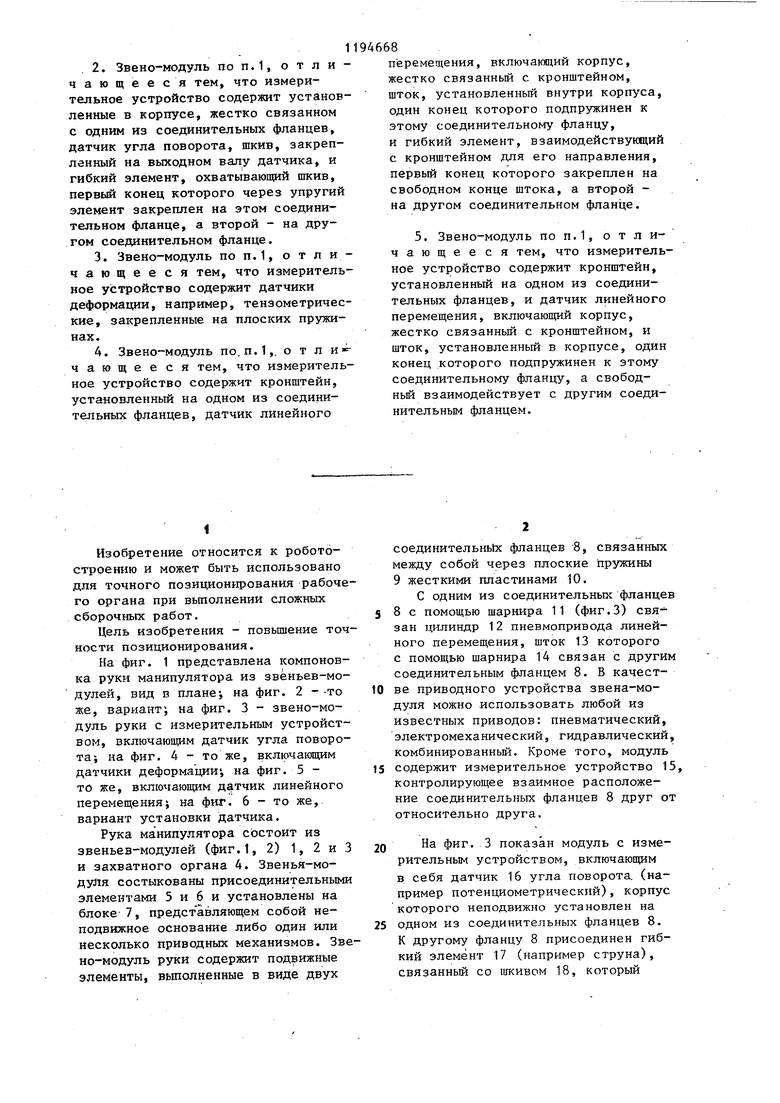
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| РАСКЛАДЧИК НАМОТОЧНОГО СТАНКА | 2009 |
|
RU2392214C1 |
| Манипулятор модульного типа | 1983 |
|
SU1093538A1 |
| ВИБРАЦИОННЫЙ РЕОМЕТР | 2008 |
|
RU2371702C1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Механическая рука манипулятора | 1985 |
|
SU1301695A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
ЗВЕНОНЙОДУЛЬ РУКИ МАНИПУЛЯТОРА, содержащее подвижные элементы, снабженные приводом линейного перемещения, включающим корпус и выходной элемент, отличающеес я тем, что, с целью повьппения точности позиционирования, подвижные элементы выполнены в виде двух соединительных фланцев, связанных между собой жесткими пластинами через плоские пружины с образованием параллелограмма, корпус привода связан шарнирно с одним из соединительных фланцев, выходной элемент с другим, а шарниры установлены на соединительных фланцах по разные стороны от линии, соединяющей центры соединительных фланцев, при этом оно снабжено измерительным устройством взаимного расположения соединительных фланцев. (Л со О О) 00
«
Изобретение относится к роботостроению и может быть использовано для точного позиционирования рабочего органа при выполнении сложных сборочных работ.
Цель изобретения - повьш1ение точное ти по зиционирования.
На фиг. 1 представлена компоновка руки манипулятора из звеньев-модулей, вид в плане-, на фиг. 2 --то же, вариант; на фиг. 3 - звено-модуль руки с измерительным устройством, включающим датчик угла поворота; на фиг. 4 - то же, включающим датчики деформации, на фиг. 5 то же, включающим датчик линейного перемещения; на фиг. 6 - то же,, вариант установки датчика.
Рука манипулятора состоит из звеньев-модулей (фиг.1, 2) 1, 2 и 3 и захватного органа 4. Звенья-модуля состыкованы присоединительными элементами 5 и 6 и установлены на блоке 7, представляющем собой неподвижное основание либо один или несколько приводных механизмов. Звено-модуль руки содержит подвижные элементы, выполненные в виде двух
соединительнь1х фланцев 8, связанных между собой через плоские пружины 9 жесткими пластинами 10.
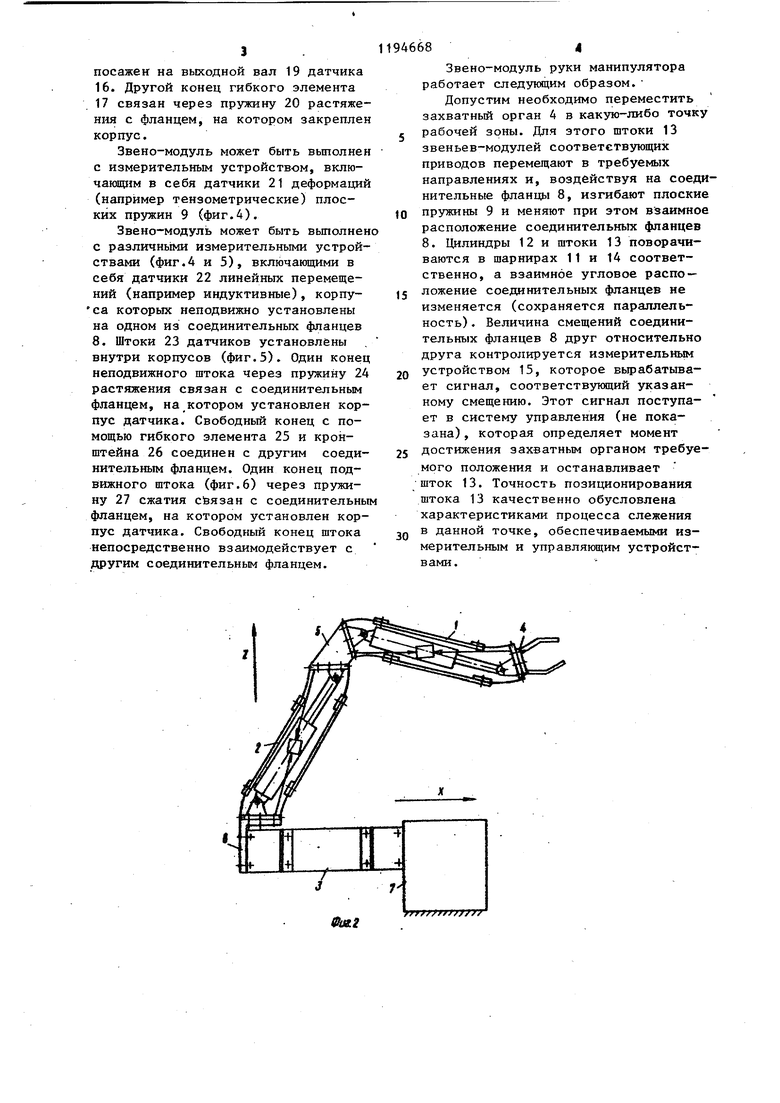
С одним из соединительных фланцев
8 с помощью шарнира 11 (фиг.З) связан цилиндр 12 пневмопривода линейного перемещения, щток 13 которого с помощью шарнира 14 связан с другим соединительным фланцем 8. В качестве приводного устройства звена-модуля можно использовать любой из известных приводов: пневматический, электромеханический, гидравлический, комбинированньй. Кроме того, модуль
содержит измерительное устройство 15, контролирующее взаимное расположение соединительных фланцев 8 друг от относительно друга,
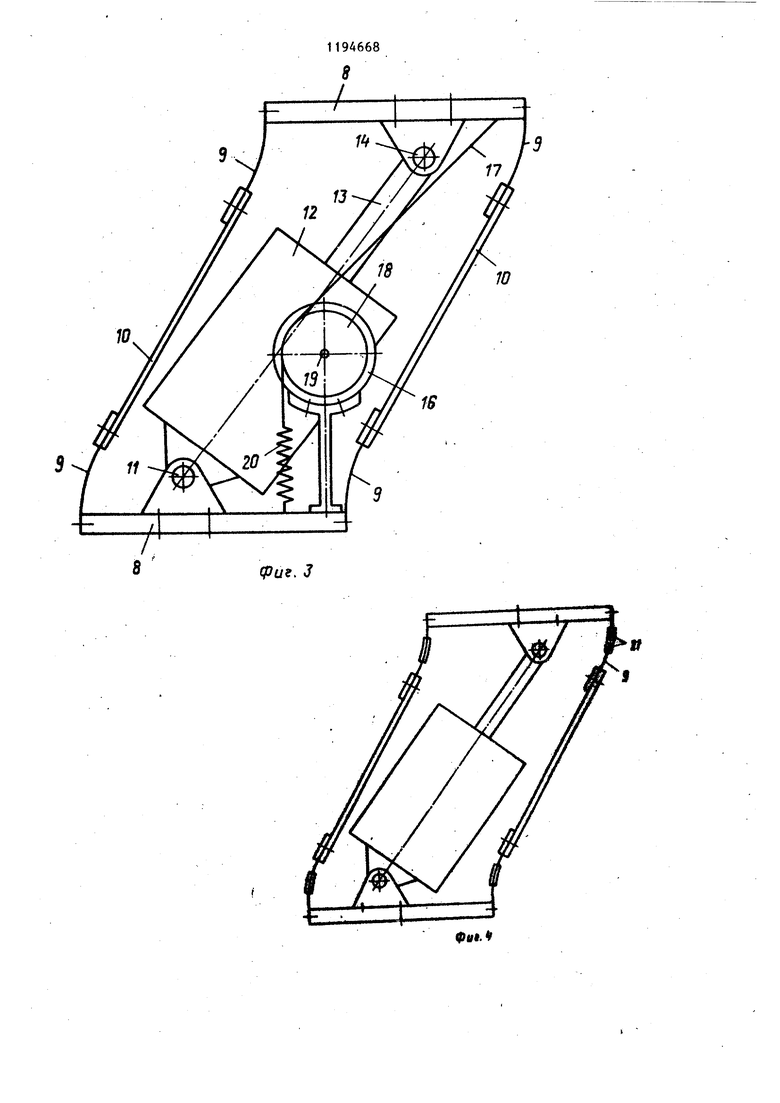
На фиг. 3 показан модуль с измерительным устройством, включающим в себя датчик 16 угла поворота, (например потенциометрический), корпус которого неподвижно установлен на
одном из соединительных фланцев В. К другому фланцу 8 присоединен гибкий элемент 17 (например струна), связанный со шкивом 18, который
посажен на выходной вал 19 датчика 16. Другой конец гибкого элемента 17 связан через пружину 20 растяжения с фланцем, на котором закреплен корпус.
Звено-модуль может быть выполнен с измерительным устройством, включающим в себя датчики 21 деформаций (например тензометрические) плоских пружин 9 (фиг.4).
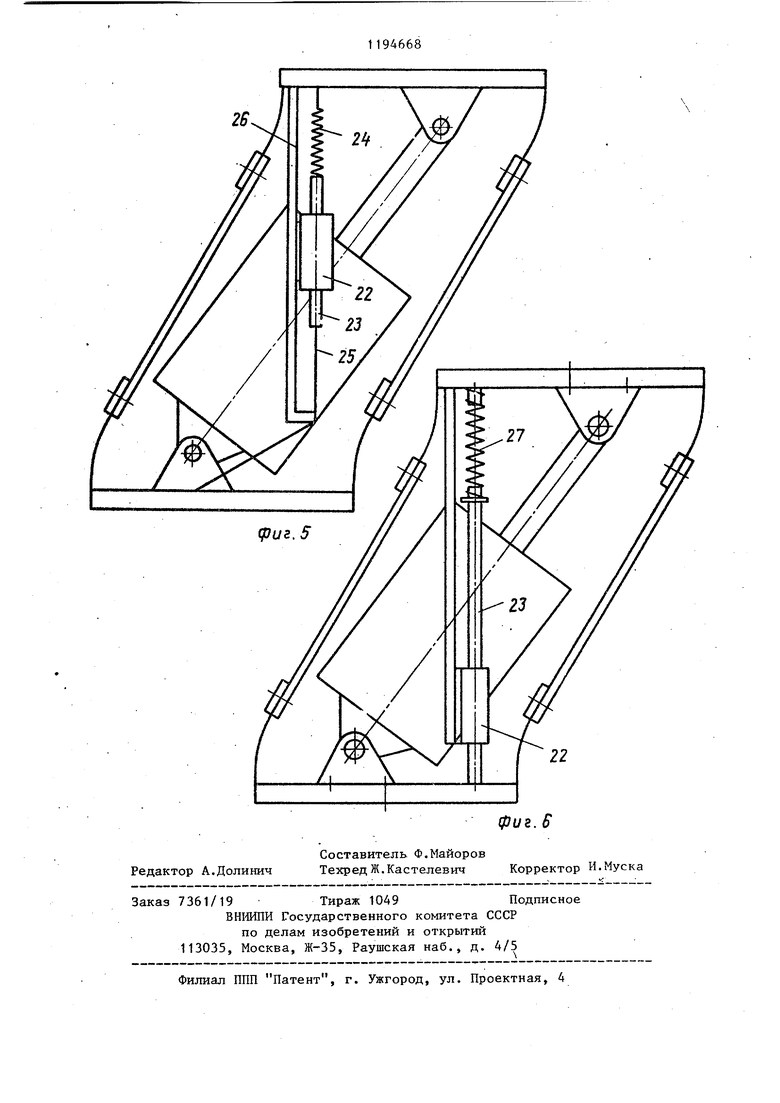
Звено-модуль может быть вьшолнен с различнь1ми измерительными устройствами (фиг.4 и 5), включающими в себя датчики 22 линейных перемещений (например индуктивные), корпуеа которых неподвижно установлены на одном из соединительных фланцев 8. Штоки 23 датчиков установлены внутри корпусов (фиг.5). Один конец неподвижного штока через пружину 24 растяжения связан с соединительным фланцем, на котором установлен корпус датчика. Свободный конец с помощью гибкого элемента 25 и кронштейна 26 соединен с другим соединительным фланцем. Один конец подвижного штока (фиг.6) через пружину 27 сжатия сЬязан с соединительным фланцем, на котором установлен корпус датчика. Свободный конец штока непосредственно взаимодействует с другим соединительным фланцем.
1946684
Звено-модуль руки манипулятора работает следующим образом.
Допустим необходимо переместить захватный орган 4 в какую-либо точку 5 рабочей зоны. Для этого штоки 13 звеньев-модулей соответствующих приводов перемещают в требуемых направлениях и, воздействуя на соединительные фланцы 8, изгибают плоские 10 пружины 9 и меняют при этом взаимное расположение соединительных фланцев 8. Цилиндры 12 и штоки 13 поворачиваются в шарнирах 11 и 14 соответственно, а взаимное угловое распо - 15 ложение соединительных фланцев не изменяется (сохраняется параллельность) . Величина смещений соединительных фланцев 8 друг относительно друга контролируется измерительным 20 устройством 15, которое вьфабатывает сигнал, соответствующий указанному смещению. Этот сигнал поступает в систему управления (не показана) , которая определяет момент 25 достижения захватным органом требуе.мого положения и останавливает ;шток 13. Точность позиционирования штока 13 качественно обусловлена характеристиками процесса слежения 30 в данной точке, обеспечиваемыми измерительным и управляющим устройствами.
| Исполнительный орган манипулятора | 1980 |
|
SU889417A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
