2.Исполнительный орган манипулятора ПОП.1, отличающийся тем, что стыковочные элементы размещены вдоль оси симметрии четырехугольника.
3.Йсполнительньй орган манипудятора ПОП.1, отличающийся тем, что стыковочные элементы смещены относительно оси симметрии четырехугольника .
4. Исполнительньш орган манипулятора ПОП.1, отличающийся тем, что каждый модуль образован посредством четырехугольников, составленных из биметаллических гибких пластин, размещенных во взаимно перпендикулярных плоскостях.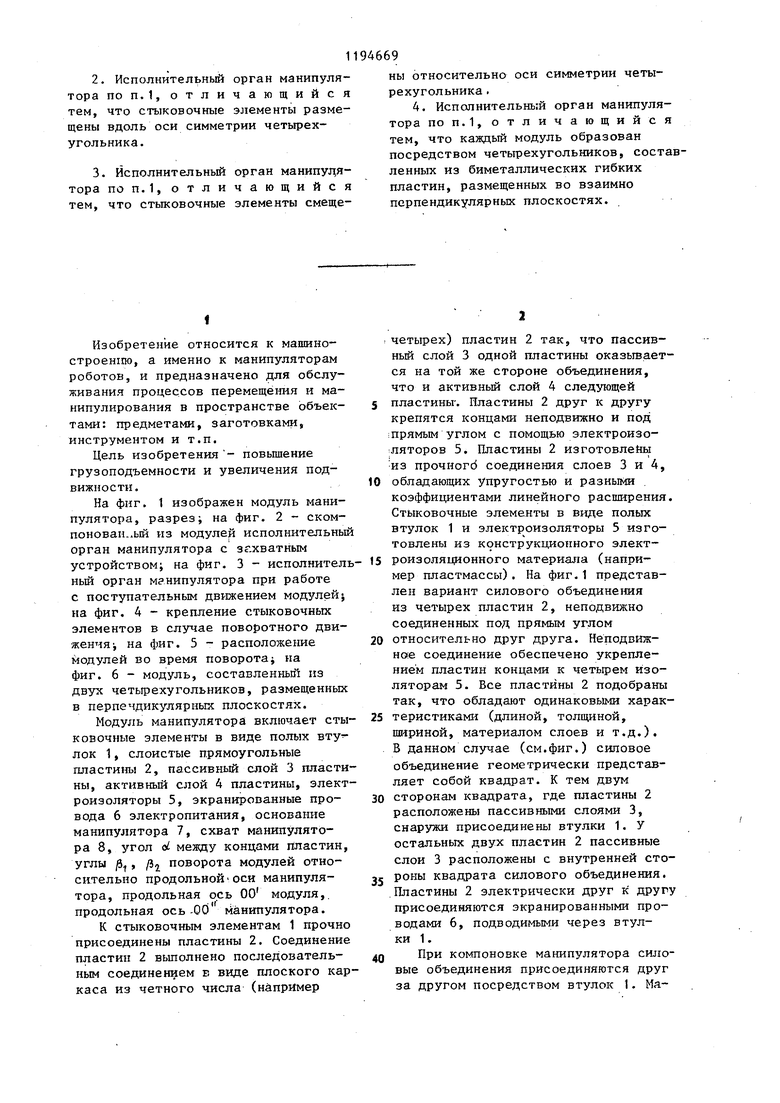
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1648759A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1194671A1 |
| Модуль манипулятора Тенгиза | 1980 |
|
SU933451A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1189674A1 |
| Манипулятор Тенгиза | 1983 |
|
SU1212780A1 |
| Модуль манипулятора Тенгиза | 1980 |
|
SU891427A1 |
| Модуль манипулятора | 1984 |
|
SU1217662A1 |
| РАБОЧИЙ ОРГАН | 2012 |
|
RU2569826C2 |
| Модуль манипулятора | 1980 |
|
SU929431A1 |
| Модуль манипулятора | 1984 |
|
SU1197834A1 |
1. ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, содержащий основание и гибкую руку, составленную из Одинаковых гибких модулей, соединенных между собой посредством стыковочных элементов, причем на последнем модуле размещено захватное устройство, кроме того, гибкий приводной элемент каждого модуля изготовлен из двуслойной пластинь с источником питания, при этом слои пластины вьшолнены из материалов, имеющих разные коэффициенты линейного расширения, отличающийся тем, что, с целью повьял ения грузоподъемности и Увеличения подвижности, гибкие приводные элементы соединены между собой, образуя четырехугольник, а стыковочные элементы закреплены на внешней стороне противоположньтх пластин со стороны слоя, имеющего меньший коэффициент линейного расширения, а две другие пластины расположены так, что слой, имеющий больший коэффициент линейного расширения, расположен с внещней стороны четырехугольника. СО 4;; сз (;D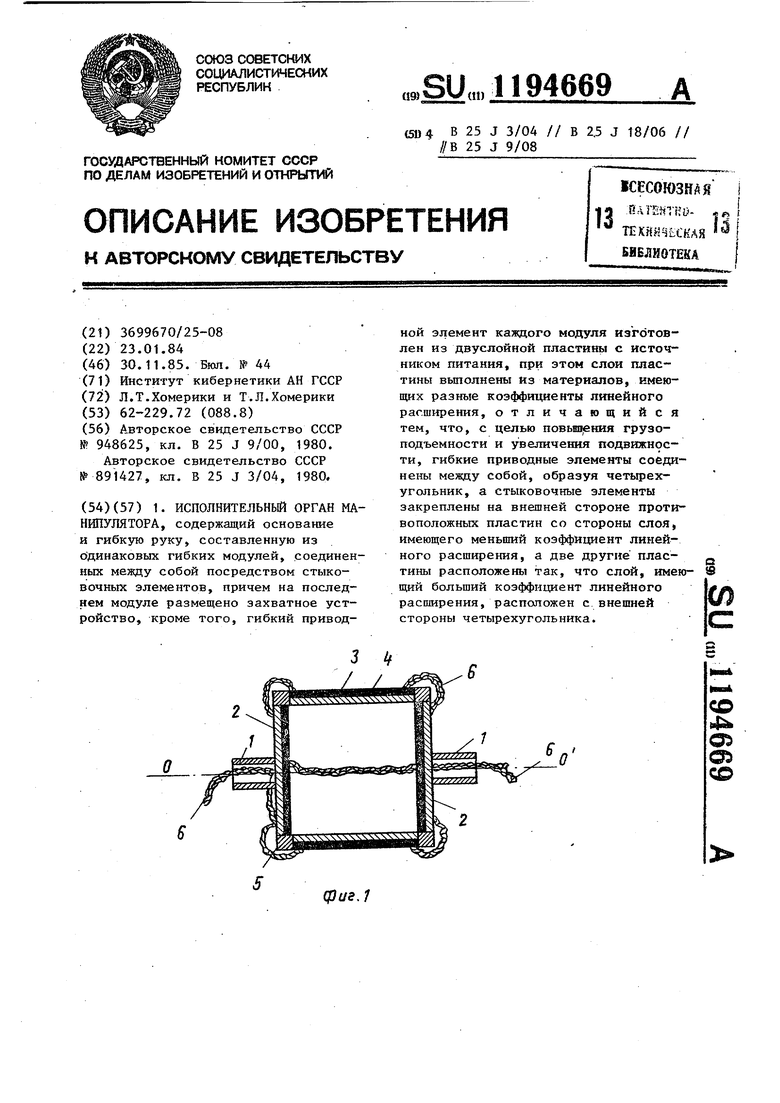
f
Изобретение относится к машиностроеншо, а именно к манипуляторам роботов, и предназначено для обслуживания процессов перемещения и манипулирования в пространстве объектами: предметами, заготовками, инструментом и т.п.
Цель изобретения- повышение грузоподъемности и увеличения подвижности.
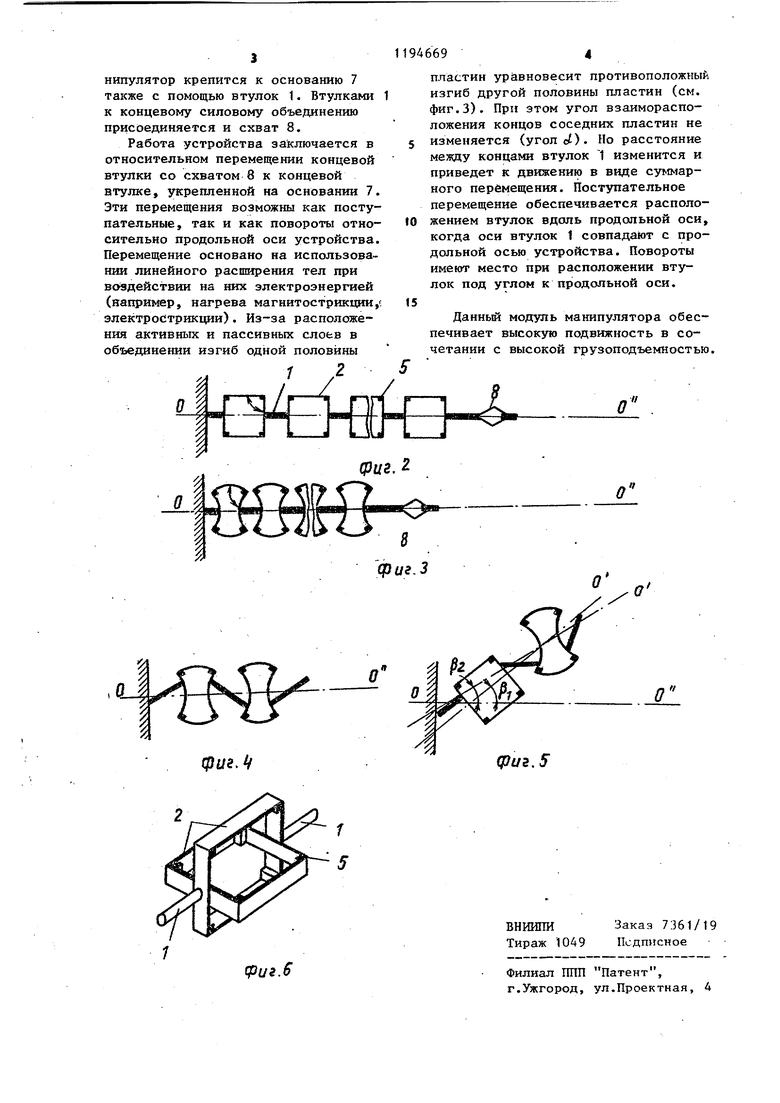
На фиг. 1 изображен модуль манипулятора, разрез; на фиг. 2 - скомпонован..ьш из модулей исполнительный орган манипулятора с захватным устройством; на фиг. 3 - исполнительный орган манипулятора при работе с поступательным движением модулей; на фиг. 4 - крепление стыковочных элементов в случае поворотного движения-, на фиг. 5 - расположение модулей во время поворота; на фиг. 6 - модуль, составленньп из двух четырехугольников, размещенных в перпендикулярных плоскостях.
Модуль манипулятора включает стыковочные элементы в виде полых вту лок 1, слоистые прямоугольные пластины 2, пассивный слой 3 пластины, активный слой А пластины, электроизоляторы 5, экранированные провода 6 электропитания, основание манипулятора 7, схват манипулятора 8, угол d между концами пластин, углы , /3j поворота модулей относительно продольнойоси манипулятора, продольная ось 00 модуля,, продольная ось-00 Манипулятора.
К стыковочным элементам 1 прочно присоединены пластины 2. Соединение пластин 2 вьшолнено последовательным соединением в виде плоского каркаса из четного числа (например
четырех) пластин 2 так, что пассивньй слой 3 одной пластины оказьтается на той же стороне объединения, что и активный слой 4 следзпощей
пластины-. Пластины 2 друг к другу крепятся концами неподвижно и под ;прямым углом с помощью электроизоляторов 5. Пластины 2 изготовлейы из прочногб соединения слоев 3 и 4,
обладающих упругостью и разными
коэффициентами линейного расширения. Стыковочные элементы в виде полых втулок 1 и электроизоляторы 5 изготовлены из конструкционного электроизоляционного материала (например пластмассы). На фиг.1 представлен вариант силового объединения из четырех пластин 2, неподвижно соединенных под прямым углом
относительно друг друга. Нецодвижно:е соединение обеспечено укреплением пластин концами к четырем изоляторам 5. Все пластины 2 подобраны так, что обладают одинаковыми характеристиками (длиной, толщиной, шириной, материалом слоев и т.д.). В данном случае (см.фиг.) силовое объединение геометрически представляет собой квадрат. К тем двум
сторонам квадрата, где пластины 2 расположены пассивными слоями 3, снаружи присоединены втулки 1. У остальных двух пластин 2 пассивные слои 3 расположены с внутренней стоРОНЫ квадрата силового объединения. Пластины 2 электрически друг к другу присоединяются экранированными проводами 6, подводимыми через втулки 1.
При компоновке манипулятора силовые объединения присоединяются друг за другом посредством втулок 1. Ма
| Способ плоского шлифования | 1978 |
|
SU948625A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Модуль манипулятора Тенгиза | 1980 |
|
SU891427A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
