Изобретение относится к устройствам для управления процессами гибки в частности к устройствам измерения углов загиба деталей в процессе их гибки на листогибочных машинах.
Целью изобретения является повышение точности измерения углов и раширение технологических возможносте
На фиг. 1 изображено предлагаемо устройство для замера углов (один и возможных вариантов установки его н гибочном оборудовании - на двухвалковой листогибочной машине с эластичным покрытием нижнего валка); на фиг. 2 - разрез А-А на фиг. 1.
В устройстве для измерения углов в вертикальных каналах П-образного паза корпуса 1 установлены подвижные штырь 2 и балансировочный грузик 3, связанные перекинутой через блочное колесико 4 гибкой нитью 5. К штырю 2, установленному в канале корпуса 1 в направляющих роликах 6 для жесткой его координации и свободного перемещения относительно корпуса, прикреплены в промежутке и к нижнему концу шарнирно осями 7 и 8 соответственно контейнер 9 с датчиком 10 линейных отклонений и поворотный фиксатор 11, к которому посредством шарового шарнирного соединения 12прикреплен щуп 13 датчика 10. Датчик 10 установлен в контейнере 9 и закреплен определенным образом посредством крепежного винта 14.
Монтажньши винтами 15 корпус 1 устройства для измерения углов крепится к траверсе 16, в которой уста новлен в опорах 17 с опорньми роликами верхний жесткий гибочный валок так, чтобы каналы П-образного паза бьши расположены вертикально, что обеспечивает нормальный ход штыря 2 и движение балансировочного грузика 3, а также чтобы нижнее крайнее положение поворотного фиксатора 11, ограниченное относительно оси штыря 2 прямым углом при помопщ фчксаторного выступа, при перемещении его по вертикали вниз посредством штыря 2 определялось горизонтальной плоскостью, касающейся снизу верхнего валка 18.
Для обеспечения более широкого применения устройства, например для замера углов при гибке конических деталей, в поворотном фиксаторе 11 устройства для непосредственного контакта по точкам с измеряемой по142722
верхностью заготовки 19 могут быть установлены по концам два контактных шарика 20 и 21 с возможностью свободного вращения.
5 Дня обеспечения приведения поворотного фиксатора 11 в начальное положение (вывод из зоны гибки) в стенки канала установки балансировочного грузика 3 устройства для
10 измерения углов вмонтирована электромагнитная катушка 22, подсоединенная через выключатель 23 к источнику 24 постоянного электрическо- . го тока.
)j Устройство может быть использовано при замере угла гибки деталей по мкогогибочной маошне с двумя вапками, верхний 18 из которых - жесткий, а нижний 25 вьтолнен с
20 эластичным покрытием.
Устройство работает следующим образом.
Перед гибкой заготовка 19, например плоский лист, устанавливается
25 горизонтально на нижнем валке 25, поворотный фиксатор 11 устройства для измерения углов опускается посредством перемещения штыря 2 по вертикали в направляющих роликах 6
ПОД действием минимально установленного с помощью выбора веса балансировочного грузика 3 инерционного усилия до контакта с заготовкой. После этого заготовка 19 изгибается путем внедрения верхнего валка 18 с заготовкой 19 в эластичное покрытие нижнего валка 25. При этом свободный конец заготовки 19 перемещается под действием изгибающих усилий в зоне гибки до момента их уравновешивания внутренними усилиями, возникающими в заготовке, образуя с- горизонтом угол загиба V, определяемый глубиной внедрения верхнего валка 18 с заготовкой 19 в эластичное
покрытие нижнего валка 25 и физико- мехаютческими и геометрическими параметрами заготовки. Перемещаясь вверх, свободный конец заготовки 19
перемещает поворотньш фиксатор 11
устройства для замера углов, при
этом пггырь 2 вертикально перемещается вверх от действия на него через шарнирное закрепление фиксатора, а сам фиксатор 11 поворачивается от- носительно шарш-грного закрепления оси 8 на угол, соответствующий углу загиба V свободного конца заготовки 19, так как линия касания заготовки
3
и фиксатора лежит на плоской поверхности свободного (неизогнутого) конца заготовки.
При повороте фиксатора 11 относительно оси 8 крепления его к штырю 2 щуп 13 датчика 10 линейных перемещений перемещается ввиду его шарнирного закрепления к фиксатору внутрь корпуса датчика 10. Данные перемещения щупа фиксируются датчиком и преобразуются затем в угловые перемещения фиксатора 11 относительно горизонта по известной, геометрической зависимости
V
arcsin(a2 + Ь -(с -&)2/2аЬ,
когда известны три стороны треугольника (верпшны - ось 7, ось 8, ось шарового шарнирного закрепления конца щупа 13), где а - расстояние между осями 7 и 8, b - расстояние межд осями 8 и шарового шарнирного закрепления 12; с - расстояние между осями 7 и шарового шарнирного закрепления 12, когда между штьфем и фиксатором прямой угол; S - зафиксированное перемещение щупа 13.
Таким образом, угол загиба свободного конца заготовки 19 является определенным и определяется непосредственно в процессе изгиба, его малейшие изменения (если точность измерения датчика 0,01 мм - порядка 0,0002 рад) тут же фиксируются датчиком, котбрьй может быть выбран из широкого ассортимента отечественных приборов активного контроля. При дальнейшем прокатьшании заготовки в валках предлагаемое устройство выполняет роль прибора активного контроля за процессом гибки, так как угол загиба свободного конца заготовки на входе в зону гибки является одним из геометрических параметров, определяющим кривизну формообразования поверхности изгибаемой заготовки. При этом искажения свободного конца заготовки от давления на него поворотного фиксатора 11 устройства для замера углов практически не наблюдается, так как данное давление устанавливается минимально возможным путем подбора веса балансировочного грузика 3 и оно является постоянным на всем протяжении хода штыря 2 и поворота фиксатора 11.
14272
В процессе гибки конической детали свободный конец изгибаемой заготовки 19 на входе в зону гибки (где установлено устройство для. из5 мерения углов) составляет с горизонтом (по известным причинам - гибка на переменную кривизну по образующей линии гиба переменный угол вдоль линии гиба. Кроме этого, в
10 процессе гибки-прокатки на конус заготовки ее разворачивают относительно оси валка, обеспечивая тем самым прокатьшание различных длин дуг вблизи внутренней и наружной
15 кромки заготовки. Поэтому целесообразно контролировать углы загиба конца заготовки на входе в зону гибки в сечениях, перпендикулярных линии гиба заготовки, что обеспечи20 вает устройство измерения углов, так как контактные шарики 20 и 21 обеспечивают точечный контакт с заготовкой 19 поворотного фиксатора 11 и вмонтированы с возможностью свобод25 ного вращения во всех направлениях. В конце гибки или при установке новой заготовки для предотвращения повреждения устройства для измерения углов, а также, чтобы оно не за3Q трудняло установку заготовки или
смену гибочного инструмента, замыкают электрическую цепь с источником 24 питания и электромагнитной
катушкой 22 посредством выкл ючателя 23. Возникающая при этом во внутрен ней полости катушки ЭДС перемещает балансировочный грузик 3, в котором индуцируется данная ЗДС, вниз, тем самым перемещая посредством гибкой нити 5 штырь 2 с фиксатором 11 вверх
до крайнего положения.
Количество витков катушки 22 и мощность источннк-а 24 электротока минимальные и определяются известными расчетами, при этом введение
данных элементов в конструк ию уст- ройства не повлечет за собой ее усложнения и-увеличения габаритов .
Предлагаемое устройство для измерения углов значительно расширяет
50 диапазон его применения, при этом повышая точность измерения, ко-, торая может быть улучшена при исполь зовании более точных датчиков линейных отклонений. Устройство можно
55 эксплуатировать автономно, используя в нем в качестве датчиков механические циферблатные индикаторные головки (например, часового типа МИ),
разградуировав циферблат по углу согласно приведенной формуле, или в системе автоматического контроля и управления процессом гибки, используя в качестве датчиков механо- электрические из средств активного контроля, а для преобразования сигналов датчиков в значения углов - используя отечественный аналого-цифровой прибор, например, типа Щ-ЗА, который имеет индикаторное цифровое
табло и выходной какап для передачи сгенерированного сигнала в двоично- десятичном коде.
Внедрение предлагаемого устройства на гибочньог машинах типа КГЛ, ГЛС, ЛГМ, ЛГМЭ, ГЛП и других аналогичной конструкции значительно повысит точность гибки, снизит трудоемкость доводочных работ, позволит автоматизировать процесс гибки и даст положительный экономический эффект.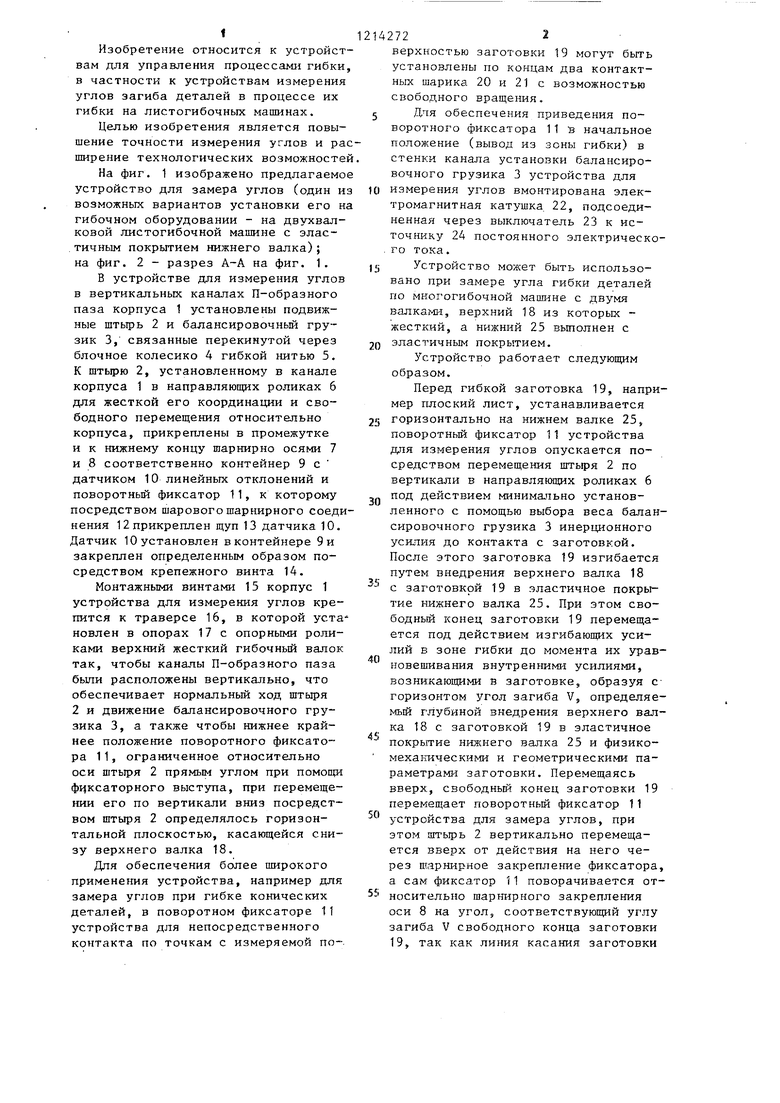


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения углов | 1985 |
|
SU1278061A1 |
| Способ автоматического управления процессом гибки листов | 1984 |
|
SU1232327A1 |
| Листогибочная валковая машина | 1976 |
|
SU715173A1 |
| Измеритель углов гибки для гибочной машины с установленными в неподвижных опорах боковыми валками | 1985 |
|
SU1274801A1 |
| Система программного управления листогибочной валковой машиной | 1973 |
|
SU504589A1 |
| Способ гибки заготовок и устройство для его осуществления | 1988 |
|
SU1806031A3 |
| Листогибочное устройство | 1982 |
|
SU1015962A1 |
| Устройство для подготовки металлических заготовок к сварке при изготовлении банок | 1990 |
|
SU1831397A3 |
| Листогибочная машина для изготовления труб намоткой | 1976 |
|
SU566648A2 |
| Способ и устройство для гибки тонколистового металла | 2017 |
|
RU2638465C1 |

I 5 14
/1-/I
Фиг2
| Листогибочная валковая машина | 1976 |
|
SU715173A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
