ного штыря, а их подвижные щупы 11 и 12 уперты в поворотный фиксатор 8, который шарнирно закреплен на подвижном штыре. Поворотный фиксатор выполнен симметричным относительно оси штыря. Датчики 9 и 10 также симметрично расположены относительно оси штыря. Свободный конец заготовки после выхода из валков перемещает
Изобретение относится к устройствам для управления процессом гибки, в частности к устройствам измерения ; углов загиба деталей в процессе их гибки на листогибочных машинах.
Цель изобретения - повышение точности измерения углов за,счет исключения давления щупа на заготовку.
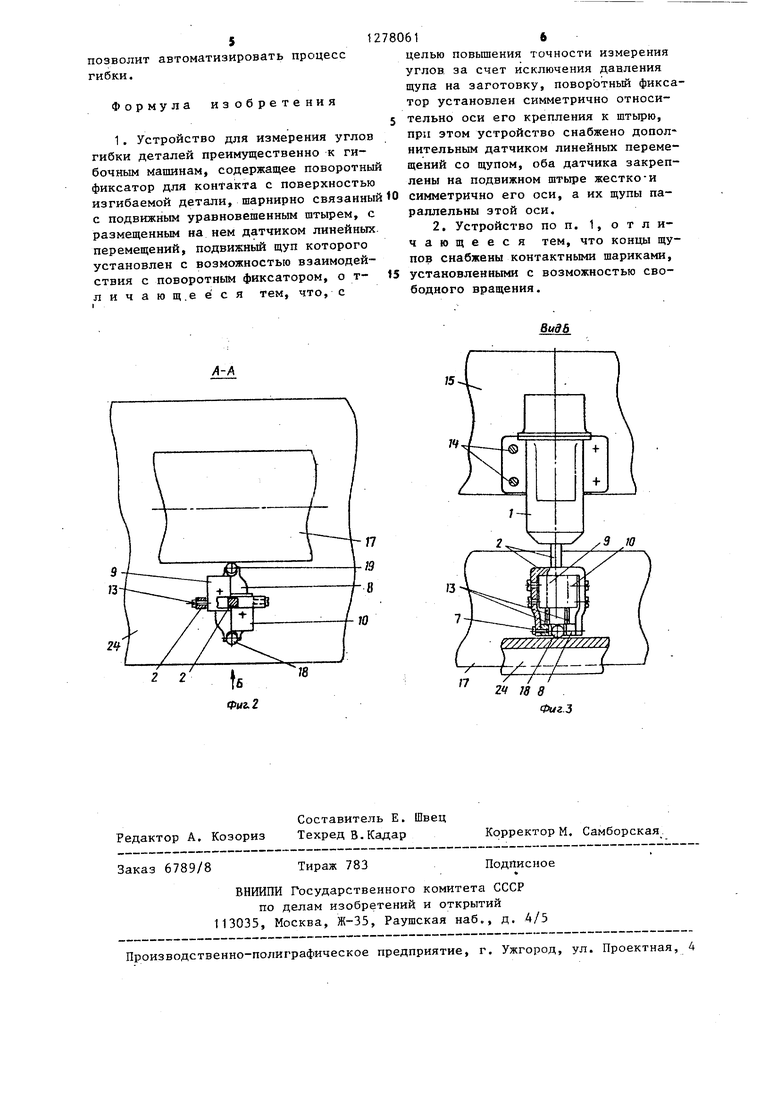
На фиг. 1 изображено предлагаемое устройство для замера углов и один из возможных вариантов установки его на гибочном оборудовании - на двухвалковой листогибочной машине с элас тичным покрытием валка; на фиг. 2 - разрез А-А на фиг. 1; на фиг, 3 - вид, Б на фиг. 2.
В устройстве для измерения углов в вертикальных каналах П-образного паза корпуса 1 установлены подвижный штырь 2 и балансировочный грузик 3, связанные перекинутой через блочное олесо 4 гибкой нитью 5. К штырю 2, стангчзленному в канале корпуса 1 в направляюЕцих роликах 6 для жесткой его координации и свободного его перемещения относительно корпуса 1, прикрепл:ен к нижнему концу, выполненному в виде П-образной вилки, шарнирно осью 7 поворотный фиксатор 8. Симметрично оси штыря 2 датчики 9 и 10 инейных перемещений, подвижные щупы 11 и 12 которых параллельны оси штыря 2 и уперты в фиксатор 8 своими концами, снабженными контактными с возможностью свободного вращения шариками 13. Датчики 9 и 10 жестко крепятся в П-образной вилке подвижного штыря. Монтажными винтами 14 корпус 1 устройства для измерения углов крепится к траверсе 15, в которой установлен в роликовых опорах 16 верхний жесткий гибочный валок 17
вверх и поворачивает фиксатор 8 относительно .оси 7 на угол загиба. При повороте фиксатора щупы 11 и 12 датчиков 9 и 10 перемещаются. Данные перемещения щупов фиксируются датчиками и преобразуются затем в угловые перемещения фиксатора относительно горизонта на простой геометрической зависимости. Т з.п, ф-лы, 3 ил.
так, чтобы каналы П-образного паза были расположены вертикально, что обеспечивает нормальный ход штыря. Для обеспечения более широкого применения устройства, например для замера углов при гиб ке конических деталей, в поворотном фиксаторе 8 устройства для непосредственного контакта по точкам с измеряемой поверхностью могут быть установлены по
концам два контактных шарика 18 и 19 с возможностью свободного вращения. Для обеспечения приведения поворотного фиксатора 8 в начальное положение (вывод из зоны гибки) в стенки канала установки балансировочного грузика 3 устройства для измерения углов вмонтирована электромагнитная катушка 20, подсоединенная через выключатель 21 к источнику 22 постоянного электрического тока.
Устройство может быть использовано при замере угла гибки деталей на листогибочной машине с двумя валками,
верхний из которых 17 - жесткий, а нижний 23 выполнен с эластичным покрытием, а между ними пода:ется заготовка 24,
Работа устройства, установленного
на двухвалковой листогибочной машине с эластичным покрытием нижнего валка, при гибке листовых деталей осуществляется следующим образом.
Перед гибкой заготовка 24 (плоский лист) устанавливается горизонтально на нижнем валке 23, поворотный фиксатор 8 устройства для измерения углов опускается посредством перемещения штыря 2 по вертикали в направляющих роликах 6 под действием минимально установленного с помощью выбора веса балансировочного грузика 3 инерционного
3
усилия до контакта с заготовкой. Посл этого заготовка изгибается путем внедрения верхнего валка 17 с заготовкой 24 в эластичное покрытие нижнего валка 23. При этом свободный конец заготовки 24 перемещается под действием изгибающих усилий в зоне гибки до момента их уравновешивания внутренними усилиями, возникающими в заготовке, образуя с горизонтом угол загиба ф , определяемый глубиной внедрения верхнего валка 17 с заготовкой 24 в эластичное покрытие валка 23 и физико-механическими и геометрическими параметрами заготовки.
Перемещаясь вверх, свободный конец заготовки 24 перемещает поворотный фиксатор 8 устройства для измерения углов, при этом штырь 2 вертикально перемещается вверх от действия на него через шарнирное закрепление фиксатора, а сам фиксатор 8 поворачивается относительно шарнирного закрепления (оси 7) на угол, соответствующий углу загиба Ф свободного конца заготовки, так как линия касания заготовки и фиксатора (контактных шариков 18 и 19) лежит на плоской поверхности свободного (неизогнутого) конца заготовки 24.
При повороте фиксатора 8 относительно оси 7 щупы 11 и 12 датчиков 9 и 10 линейных перемещений соответственно перемещаются под действием на них фиксатора 8 внутрь корпус (щуп 11) и наружу (щуп 12) своих дачиков, причем ввиду симметричности установки датчиков 9 и 10 параллельно ина одинаковом расстоянии до оси штыря 2 в плане. Данные перемещения щупов фиксируются датчиками 9 и 10 и преобразуются затем в угловые перемещения фиксатора 8 относительно горизонта по простой геометр ческой зависимости
Ф arctg (c-e)/(a+b),
де а, b - расстояние от щупов 11 и 12 50 до оси штыря 2 поворота фиксатора 8 в плане (до плоскости, проходящей через ось штыря 2 и ось 7 поворота фиксатора 8) ; 55 с, е - зафиксированное перемещение щупов 11 и 12 датчиками 9 и 10 соответственно.
0
5
0
5
5
0
0
0 5
Из формулы видно, что ввиду постоянства суммы (а + Ь) (в данном случае а Ь - датчики установлены относительно штыря 2 симметрично и жестко) величина tgO линейно зависит только от показаний датчиков (с - е), что говорит о стабильности точности измерения углов на всем диапазоне измерения предлагаемым устройством, зависящим только от точности измерения используемых датчиков 9 и 10. Кроме того, так как установлено для датчика и разность (с - е) представляет относительную сумму зафиксированных ими линейных отклонений, то практически точность удваиваетйя (так как перемещения щупов сие (их величины) берутся со своим знаком - если перемещение щупа наружу относительно корпуса датчика +, если внутрь -.
При этом не требуется большая точность установления датчиков 9 и 10 относительно фиксатора 8, кроме как обеспечение параллельности их щупов и одинаковости расстояния до оси штыря 2 в плане, так как используются относительные показания датчиков (разность их показаний).
Установление датчиков на равном расстоянии до оси штыря 2 обеспечивает взаимное уравновешивание усилий давления щупов 11 и 12 датчиков на фиксат.ор 8 относительно оси 7 крепления его к штырю 2, что устраняет появление дополнительных усилий от фиксатора 8 на свободный конец изгибаемой заготовки при повороте фиксатора в процессе гибки заготовки, тем самым повышая точность измерения.
Предлагаемое устройство для измерения углов повышает точность и стабильность измерений. Изготовление его просто. Если, например, использовать электромеханические датчики, то их показания можно преобразовать в значения углов загиба при использовании, например, отечественного аналого-цифрового прибора типа Щ-34, имеющего индикаторное цифровое табло и выходной канал для передачи сгейе- рированного сигнала в двоично-десятичном коде.
Внедрение изобретения на гибочных машинах типа КГЛ,- ГЛС, ЛГМ, ЛГМЭ, ГЖ и других аналогичной конструкции значительно повысит точность гибки, снизит трудоемкость доводочных работ.
позволит автоматизировать процесс гибки.
Формула изобретения
целью повышения точности измерения углов, за счет исключения давления щупа на заготовку, поворотный фиксатор установлен симметрично относи- 5 тельно оси его крепления к штырю, при этом устройство снабжено дополнительным датчиком линейных перемещений со щупом, оба датчика закреплены на подвижном штьфе жестко-и
1. Устройство для измерения углов гибки деталей преимущественно к гибочным машинам, содержащее поворотный фиксатор для контакта с поверхностью изгибаемой детали, шарнирно связанныйЮ симметрично его оси, а их щупы па- с подвижным уравновешенным штырем, с раллельны этой оси. размещенным на нем датчиком линейных 2. Устройство по п. 1, о т л и- перемещений, подвижный щуп которого чающееся тем, что концы щу- установлен с возможностью взаимодей- пов снабжены контактными шариками, ствия с поворотным фиксатором, о т- 15 установленными с возможностью сво- личающ.ееся тем, что, с бодного вращения.
12780616
целью повышения точности измерения углов, за счет исключения давления щупа на заготовку, поворотный фиксатор установлен симметрично относи- 5 тельно оси его крепления к штырю, при этом устройство снабжено дополнительным датчиком линейных перемещений со щупом, оба датчика закреплены на подвижном штьфе жестко-и
й йЮ симметрично его оси, а их щупы па- раллельны этой оси. 2. Устройство по п. 1, о т л и- чающееся тем, что концы щу- пов снабжены контактными шариками, 15 установленными с возможностью сво- бодного вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения углов | 1984 |
|
SU1214272A1 |
| Измеритель углов гибки для гибочной машины с установленными в неподвижных опорах боковыми валками | 1985 |
|
SU1274801A1 |
| Листогибочная валковая машина | 1976 |
|
SU715173A1 |
| Способ автоматического управления процессом гибки листов | 1984 |
|
SU1232327A1 |
| Устройство для измерения углов гибки деталей на гибочной машине | 1987 |
|
SU1489884A1 |
| Способ и устройство для гибки тонколистового металла | 2017 |
|
RU2638465C1 |
| ВАЛКОВАЯ ЛИСТОГИБОЧНАЯ МАШИНА | 1993 |
|
RU2015772C1 |
| Устройство для гибки листового металла | 1978 |
|
SU747405A3 |
| Листогибочное устройство | 1982 |
|
SU1015962A1 |
| Система программного управления листогибочной валковой машиной | 1973 |
|
SU504589A1 |
Изобретение относится к устройствам для управлейня процессами гибки. Оно и позволяет с большей точностью измерять углы загиба деталей. Устройство содержит в корпусе 1 подвижный штырь 2, уравновешенный балансировочным грузиком 3. На подвиж- .: ном штыре жестко закреплены два датчика 9 и 10 линейных перемецений, оси которьпс параллельны оси подвиж/5 (Л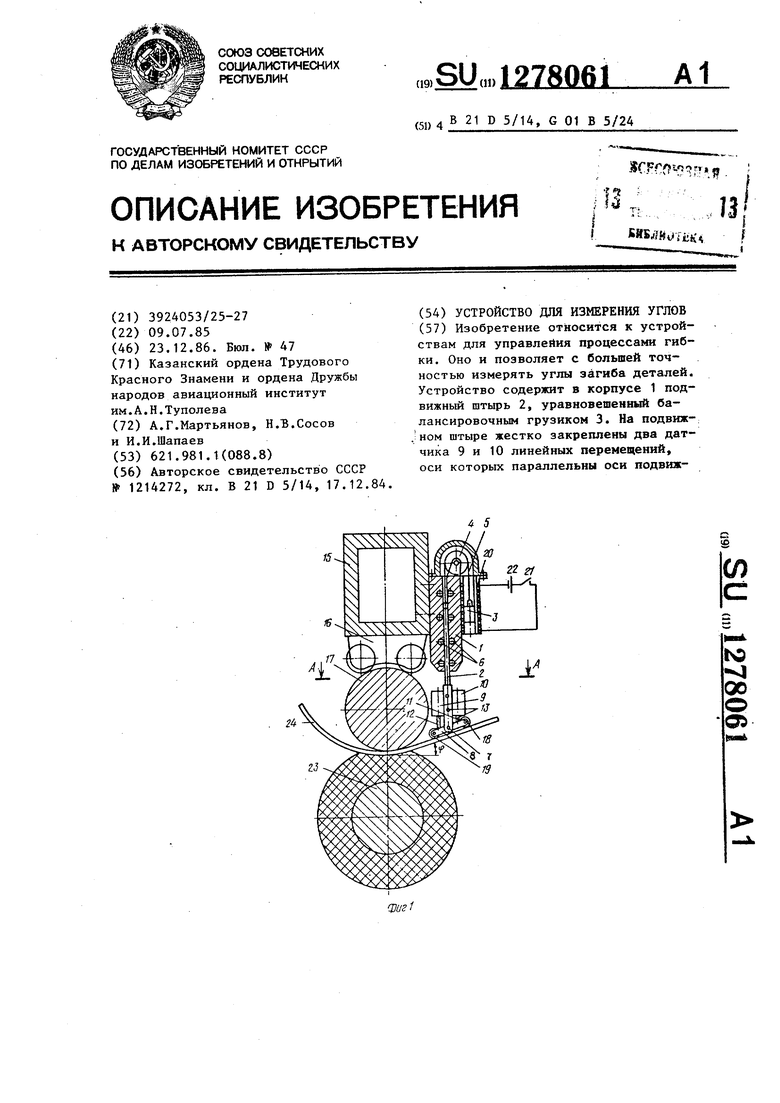
А-А
15
(/////// ////////Л
2t J8 8
Фиг.З
Редактор А. Козориз
Составитель Е. Швец Техред В.Кадар
Заказ 6789/8
Тираж 783
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М. Самборская
Подписное
| Устройство для измерения углов | 1984 |
|
SU1214272A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
