В ОСНОВНОМ авторском свидетельстве описан кистевой захват-манипулятор, в котором для передачи зажимного усилия на прямолинейных участках использованы штоки, связанные через шаровые шарниры системой последовательно расположенных по нейтральной линии шарнира шариков, заключенных в гибкую оболочку. Для фиксации зажимаюш,его усилия захвата после снятия его оператором применен зажим штока конусным шариковым замком.
Недостатком известных опор с карданным шарниром манипуляторов подобного типа является то, что они создают манипулятору суженную рабочую зону ИЗ-за меньших углов его поворота во взаимно-перпендикулярных направлениях.
Отличительная особенность описываемой опоры к кистевому захвату-манипулятору по авт. свид. № 115714 состоит в том, что, с целью расширения рабочей зоны захвата-манипулятора за счет увеличения предельных углов поворота во взаимно-перпендикулярных направлениях, а также, с целью повышения заш.итных параметров опоры, внешний цилиндр и корпус опоры снабжены окнами прямоугольной формы.
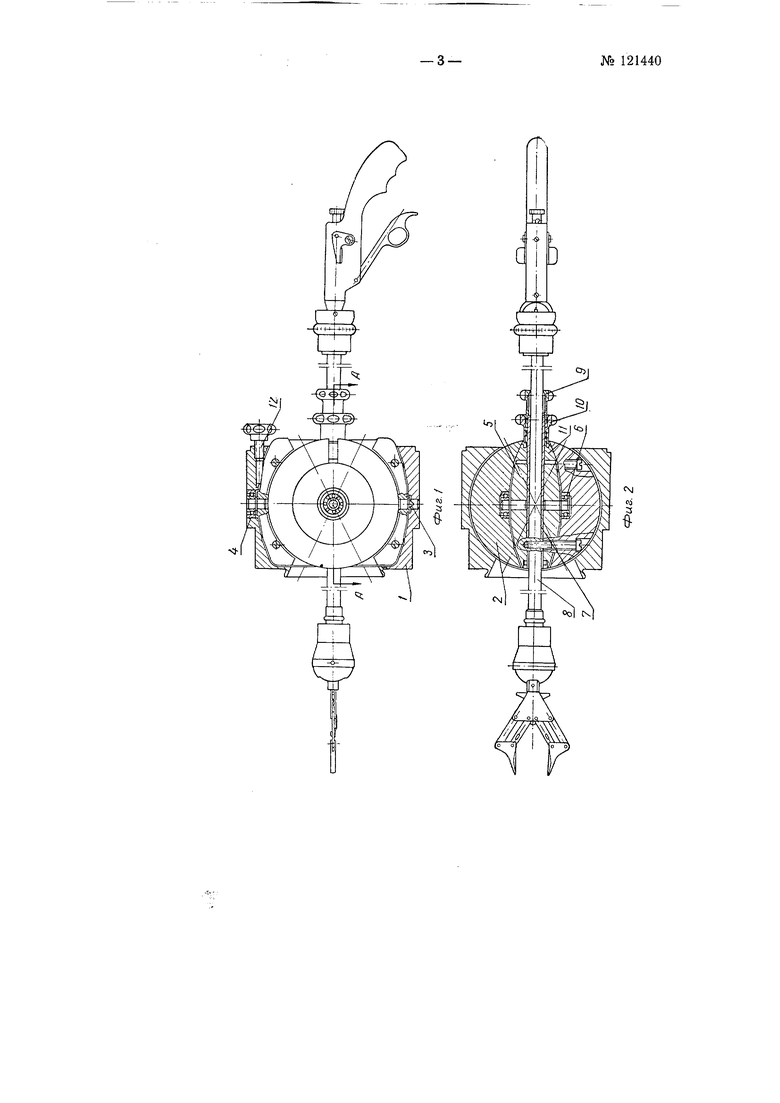
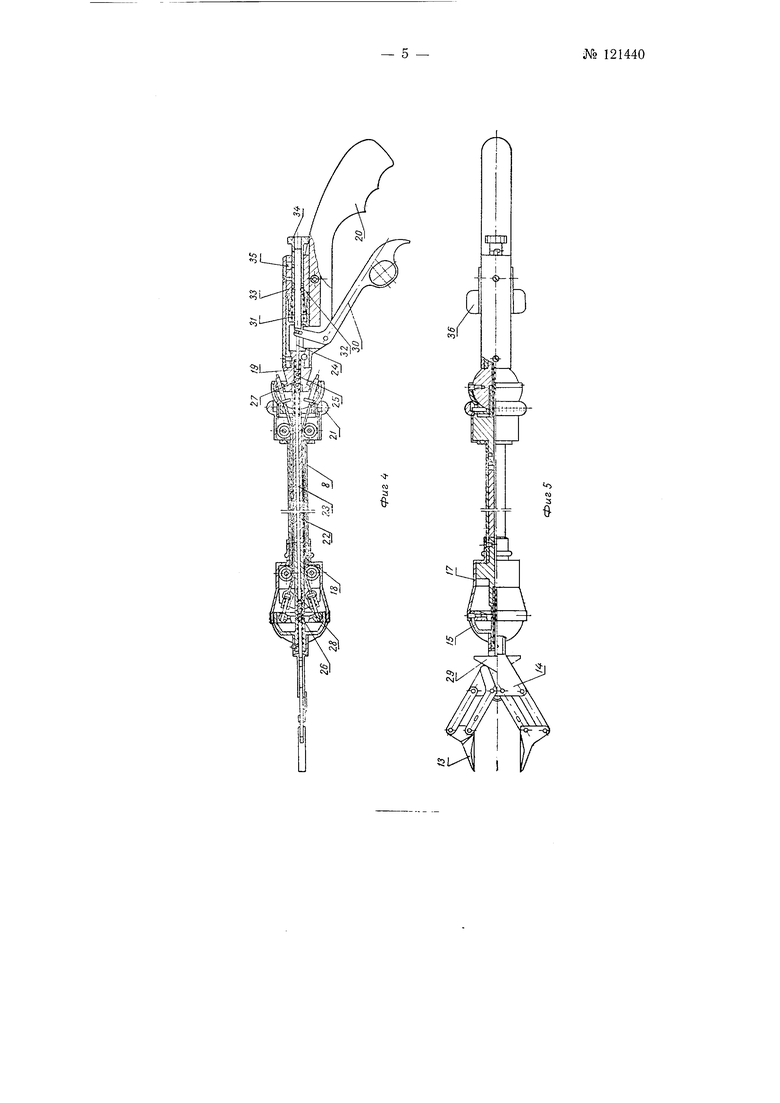
На фиг. 1 изображена описываемая опора с кистевым захватом-манипулятором, вид сбоку; на фиг. 2 - то же, разрез по АА на фиг. 1; на фиг. 3 - опора со стороны рабочей зоны захват-манипулятора; на фиг. 4. 5 - кистевой захват-манипулятор, монтируемый в описываемой опоре, в разрезе, вид сверху.
Опора имеет корпус 1, укрепляемый в стенке камеры. Внешний цилиндр 2 удерживается в корпусе поднятником 3 и шарикоподшипником 4. Внутренний цилиндр 5 размеш,ен внутри внешнего цилиндра на шарикоподшипниках 6. Внешний цилиндр состоит из двух полуцилинд№ 121440- 2 -
ров. Во внутреннем цилиндре укреплена трубка 7, через которую проходит трубчатая штанга 8 кистевого захвата-манипулятора. Трубка имеет гайку 9 для зажима трубчатой- штанги по внешней поверхности. Внешний и внутренний цилиндры с их опорами образуют карданный шарнир, обеспеч иваюш.ий повороты кистевого захвата-манипулятора в двух взаимно-перпендикулярных направлениях.
Внешний цилиндр и корпус снабжены окнами прямоугольной формы Б и В (см. фиг. 3), обеспечиваюш;ими увеличенные предельные углы поворота кистевого захвата-манипулятора. Гайка 10 с клином 1J служат для фиксации внутреннего цилиндра во внешнем. Винтом 12 зажимают в корпусе внешний цилиндр.
Рабочие губки 13 кистевого захвата-манипулятора укреплены на обойме 14, соединенной посредством резьбы с полусферой 15, заключенной, в корпус 17. Полусфера связана двумя тросиками 18 с корпусом 19 рукоятки 20. Тросики проходят внутри трубчатой штанги 8. Центральная трубка 22 снабжена каналом, через который проходит шток 23, передаюш,ий толкаюп,ее усилие стержня 24 через шарики 25, 26 в боуденовской оболочке 27, 28 клину 29, сближаюш ему рабочие губки для зажима сосуда с радиоактивным веш,еством. Толкаюш.ее усилие стержень получает от рычага 30, на который воздействует оператор. На стержень надета пружина 31, которая давит на шарики 32 замка, зажимаюш,ие стержень во втулке 33 с конической внутренней расточкой. Включение и выКоТючение замка во время работы производятся поворотным ограничителем 34, снабженным фигурным вырезом, в который входит штифт 35. Фигурный вырез позволяет фиксировать ограничитель в двух положениях, соответствуюн;их включению и выключению шарикового замка. Левый и правый рычажки 36 позволяют осуш,ествлять разовое отключение шарикового замка за счет выталкивания шариков втулкой при работе правой или левой рукой.
Кистевой захват-манипулятор с описываемой опорой позволяет осуш;ествлять зажим сосуда рабочими губками 13, поворот его вокруг нейтральной линии, перемеш;ение в камере за счет поворота цилиндров опоры и смеш,ение относительно опоры в глубь шкафа. Гайка 21 служит для фиксации губок после поворота вокруг нейтральной линии.
Предмет изобретения
Опора к кистевому захвату-манипулятору по авт. свид. № 115714 для работы с радиоактивными веш,ествами с применением карданного шарнира, снабженного внутренним и внешним цилиндрами, отличаюш;аяс я тем, что, с целью расширения рабочей зоны захвата-манипулятора за счет увеличения предельных углов поворота во взаимно-перпендикулярных направлениях, а также, с целью повышения заш,итных параметров опоры, внешний цилиндр и корпус опоры снабжены окнами прямоугольной формы.
/
Ж
N
| название | год | авторы | номер документа |
|---|---|---|---|
| Кистевой захват-манипулятор | 1957 |
|
SU115714A1 |
| Опорный шарнир к манипулятору для работы с радиоактивными веществами | 1959 |
|
SU125980A1 |
| Запястье манипулятора | 1985 |
|
SU1303405A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Привод захвата манипулятора | 1975 |
|
SU521128A1 |
| Устройство для спуска и подъема объектов | 1982 |
|
SU1082751A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
| КИСТЕВОЙ ПРОТЕЗ | 2006 |
|
RU2423952C2 |
| Крестово-кулисная муфта | 2024 |
|
RU2829844C1 |
| Шпаговый манипулятор | 2017 |
|
RU2663393C1 |

/ т
Фиг 5
NJ
со 3
