Известны кистевые захваты-манипуляторы для дистанционной работы в химических шкафах со средним уровнем радиоактивности, в которых используются шарнирный или тросовый привод для передачи усилия оператора к рабочим губкам, зажимаюш,им сосуд с .химическим реактивом. Недостаток такого типа кистевых захватов-манипуляторов состоит в том, что они не обеспечивают зажим сосуда при поворотах кисти вокруг горизонтальной оси.
В описываемом кистевом захвате-манипуляторе этот недостаток устранен тем, что для передачи зажимного усилия на прямолинейных участках использованы штоки, связанные через шаровые шарниры системой последовательно расположенных шариков, заключенных в гибкую оболочку.
Отличительная особенность описываемого кистевого захвата-манипулятора состоит в том, что, с целью сохранения постоянства зажимного усилия при изменении относительного положения звеньев захвата в пространстве, шарики в боуденовской оболочке расположены по нейтральной линии шарнира. Для фиксации зажимающего усилия захвата после снятия зажимающего усилия оператором применен зажим штока конусным шариковым замком.
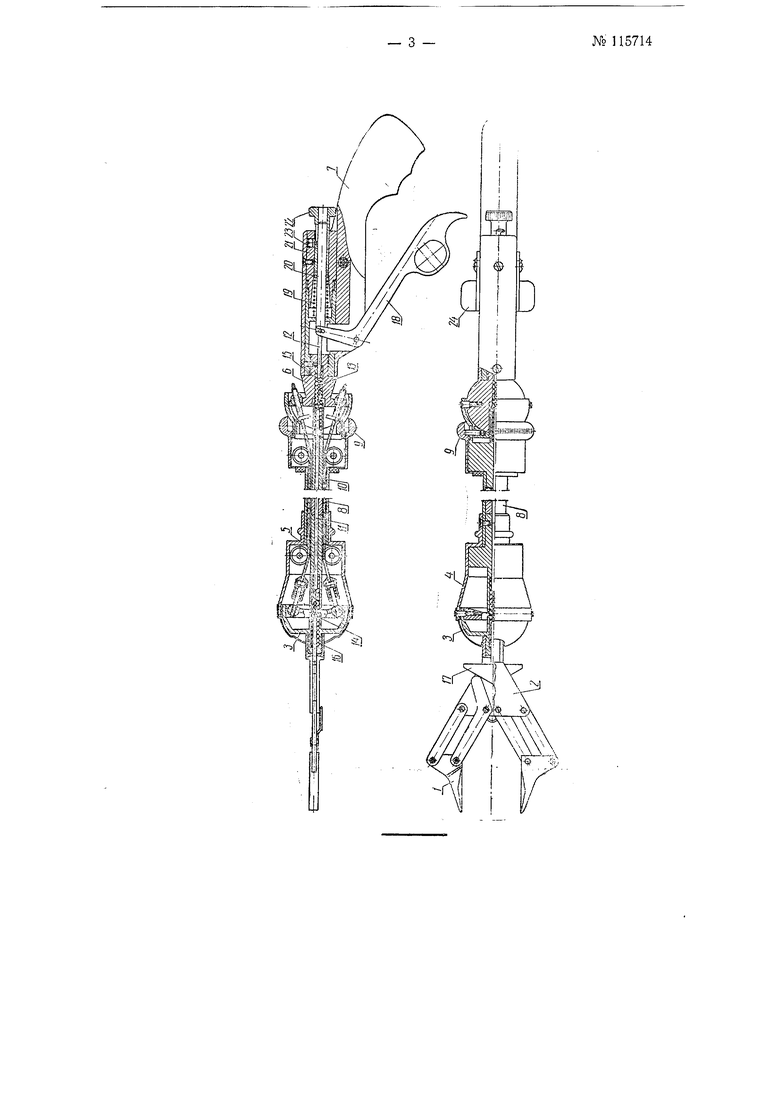
На чертеже изображен кистевой захват-манипулятор в двух проекциях.
Рабочие губки 1 шарнирно укреплены на обойме 2, соединенной посредством резьбы с полусферой 3, заключенной в корпус 4. Полусфера связана двумя тросиками 5 с корпусом 6 рукоятки 7. Тросики проходят внутри трубчатой штанги S, прикрепленной к гайке 9, монтируемой в стенке химического шкафа. Центральная трубка 10 имеет канал, через который пр-оходит шток 11, передающий толкающее усилие стержня 12 через шарики 13, 14 в боуденовской оболочке 15, 16 к клину 17, сбли№ 115714- 2 -
жающему рабочие губки для зажилга сосуда с химическим реактивом. Толкающее усилие стержыо передается от рычага 18, лз который воздейетвует оператор. На стержень надета ;-ружи1 а 19, которая давит на шарики 20 замка, зажил;ающпе стержень во BTyjH;e 21 е конической внутреггиен расточкой. BключeинL и вы.клгачение зам.ча во время работы ироизводнтся иоворотным ограш- чнтеле.м 22, с1 абжениь М фигурным вырезом, в который входит штифт 23. Фигурный вырез позволяет фиксировать ог 5а}гичитель в двух положениях, соответствующих включению и выключению шарикового замка. Левый и правый рычажки 24 позволяют осуществлять разовое отключение щарикового замка за счет выталкивания щариков втулкой при работе правой или левой рукой.
Кистевой захват-манипулятор дает возможьость осуществлять зажим сосуда рабочими губками / и поворот его вокруг нейтральной линии. Перемещеиие сосуда в щкафу обесиечивается поворотом гайки 9 ео щтангой 8 в щарнире, размещенном в стенке щкафа. Наклоны сосуда осуществляются за счет поворота тросиками 5 полусферы 5, несущей рабочие губки.
Предмет изобретения
1.Кистевой захват-манипулятор, в котором для передачи зажимного усилия на прямолинейных участках использованы щтоки, связанные через шаровые щарниры системой последовательно расноложенных щариков, заключенных в гибкую оболочку, отличающийся тем, что, с целью сохранения постоянства зажимного усилия при| изменении относительного положения звеньев захвата в пространстве, щарики в боуде овской оболочке расположены по нейтральной линии щарнира.
2.Кистевой захват по п. 1, отличающийся тем, что, с целью фиксации зажимающего усилия захвата после снятия зажимающего усилия оператором, применен зажим щтока конусным щариковым замком.
| название | год | авторы | номер документа |
|---|---|---|---|
| Опора к манипулятору для работы с радиоактивными веществами | 1957 |
|
SU121440A2 |
| Опорный шарнир к манипулятору для работы с радиоактивными веществами | 1959 |
|
SU125980A1 |
| Шпаговый манипулятор для работы с радиоактивными веществами | 1959 |
|
SU125866A1 |
| Кузнечный манипулятор | 1985 |
|
SU1263420A1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
| Захват | 1980 |
|
SU905061A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Привод захвата манипулятора | 1975 |
|
SU521128A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Машина испытательная | 2017 |
|
RU2643183C1 |