Изобретение относится к машиностроению, в частности к манипуляторам и промышленным роботам, и может быть использовано при автоматизации технологических процессов.
Цель изобретения - расширение функциональных возможностей робота путем повышения подвижности схвата.
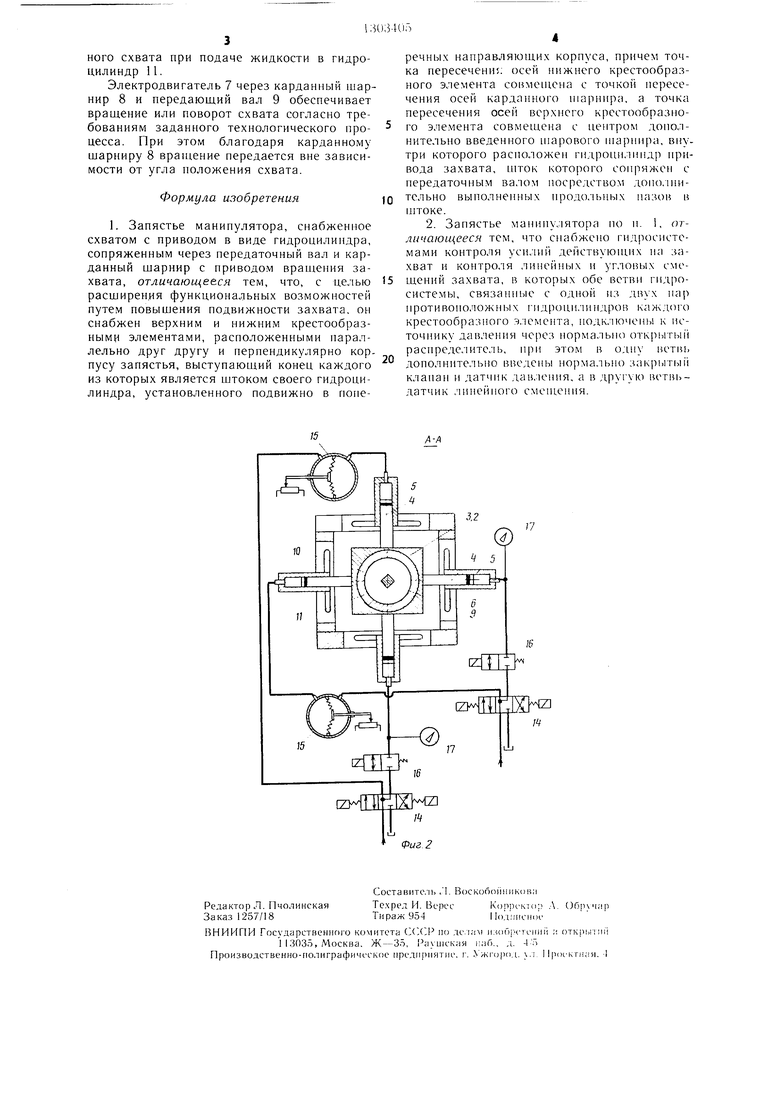
На фиг. 1 представлено запястье манипулятора, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1.
Запястье смонтировано в корпусе 1 и представляет собой промежуточный узел между рукой манипулятора и схватом, напри
детали в нем с объектом позиционирования. Момент соприкосновения и его направление автоматически фиксируется электронным устрйством управления по сигналу датчика 17 усилия - как минимум одним из
5 всех этих датчиков усилия запястья, включенного в ветвь с нормально закрытым клапаном 16 гидроцилиндра 5. ЭВМ манипулятора анализирует характер соприкосновения, я если он близок к номинальному, то выра Q батывается сигнал на открытие клапана 16. Распределитель 14 находится в нормально среднем проводном положении. При этом открывается свободное сообщение между противоположными полостями гидроцилиндров 5 данного крестообразного элемента 2(3)
20
мер, кулисно-рычажного типа. Запястье содержит два крестообразных элемента 2 и 3, расположенных параллельно друг другу и 15 в данном направлении через элементы гид- перпендикулярно оси корпуса 1. Выступаю- росхемы (фиг. 2) 5-15-14-16-5. В этом
положении минимума усилия (меньше заданного) происходит самоустановка, например, детали в отверстие. Если по характеру соприкосновения видно, что номинального позиционирования не достигнуто, то включаются одновременно клапан 16 и распределитель 14, причем клапан 16 открывает ветвь своего гидроцилиндра 5, а распределитель 14 включается в одно из своих край8 совмещена с точкой пересечения осей 25 положений в зависимости от того, в крестообразных штоков 4 гидроцилиндров 5 какую сторону необходимо подвинуть или по- элемента 2. В центральной часи крестооб- вернуть запястье (схват). Жидкость от на- разного элемента 3 установлен шаровой шар- норной станции направляется или в ветвь пир 10, внутри которого выполнен гидро- с датчиком 15 или в ветвь с датчиком 16, цилиндр 1, в штоке 12 которого имеется в ту или иную сторону смешая связан- осевая направляющая (например, квадрат- 30 ные штоки 4 гидроцилиндров 5 запястья. Веши и конец каждого из элементов 2 и 3 выполнен в виде штока 4 своего гидроцилиндра 5. Каждый гидроцилиндр 5 установлен подвижно в поперечных направляюших 6 корпуса 1. К крестообразному элементу 2 прикреплен редукторный электродвигатель 7, вал которого через карданный шарнир 8 связан с передаточным валом 9, причем точка пересечения осей карданного шарнира
личина линейного смешения своего крестообразного элемента 2 (3) в каждом из направлений контролируется своим датчиком 15. При работе одновременно в обоих этих направлениях наблюдается суперпозиция сме- 35 шений элемента 2 (3) в пределах своего поперечного плоского поля отработки. Если таким образом работают два параллельных гидроцилиндра 5 обоих крестообразных элементов 2 и 3 одновременно в одну стоной формы), сопряженная с передаточным валом 9 без возможности их взаимного проворота, но с возможностью их взаимного осевого смешения. Шток 12 шарнирно сопряжен с губками 13 схвата, выполненного по известной схеме.
Полости противоположных гидроцилиндров 5 (фиг. 2) каждого из крестообразных элементов 2 и 3 образуют взаимообратные всасывающую и нагнетающую полости, соединенные гидравлическими ветвя- .. рону, то весь схват плоскопараллельно пере- ми с гидравлической напорной станцией че- мещается в этом направлении без поворота рез тре хпозиционный распределитель 14 с нормально открытым состоянием между этими ветвями. В одной из двух гидравлических ветвей противоположных гидроцилиндров 5 включен датчик 15 линейного смешения свое- 45 оси карданного шарнира 8 или шаро- го крестообразного элемента 2(3) в каж- вого шарнира 10, если смещается один из дом из его двух взаимно перпендикулярныхкрестообразных элементов 2 или 3, и относинаправлений смешения, а в другой ветви - тельно обоих этих осей, если смешаются од- нормально закрытый клапан 16.новременно оба крестообразных элемента 2
Датчик 15 линейного смешения выполнени 3. При этом наблюдается суперпозиция
в виде, например, расходомера мембранно- 50 как угловых смешений схвата в своих взаимсхвата. Если один из этих гидроцилиндров 5 включен в одну сторону смещения, а другой - в другую, то схват поворачивается в соответствующую сторону относпго типа, мембрана которого связана с ползуном потенциометра.
Устройство работает следующим образом.
При подводе схвата к месту позиционирования, с деталью или без нее, с опредено перпендикулярных плоскостях, так и суперпозиции всех линейных и угловых смешений. Таким образом, осуществляется тактильное позиционирование и установка объекта сборочным или иным технологическим роленной погрешностью, допускаемой величи- ботом.
нами линейного и углового смещения запя-Захват и отпуск детали осуществляется
стья, происходит соприкосновение схвата илиизвестным способом работы кулисно-рычаждетали в нем с объектом позиционирования. Момент соприкосновения и его направление автоматически фиксируется электронным устрйством управления по сигналу датчика 17 усилия - как минимум одним из
5 всех этих датчиков усилия запястья, включенного в ветвь с нормально закрытым клапаном 16 гидроцилиндра 5. ЭВМ манипулятора анализирует характер соприкосновения, я если он близок к номинальному, то выраQ батывается сигнал на открытие клапана 16. Распределитель 14 находится в нормально среднем проводном положении. При этом открывается свободное сообщение между противоположными полостями гидроцилиндров 5 данного крестообразного элемента 2(3)
5 в данном направлении через элементы гид- росхемы (фиг. 2) 5-15-14-16-5. В этом
5 положений в зависимости от того, в какую сторону необходимо подвинуть или по- вернуть запястье (схват). Жидкость от на- норной станции направляется или в ветвь с датчиком 15 или в ветвь с датчиком 16, в ту или иную сторону смешая связан- 0 ные штоки 4 гидроцилиндров 5 запястья. Величина линейного смешения своего крестообразного элемента 2 (3) в каждом из направлений контролируется своим датчиком 15. При работе одновременно в обоих этих направлениях наблюдается суперпозиция сме- 5 шений элемента 2 (3) в пределах своего поперечного плоского поля отработки. Если таким образом работают два параллельных гидроцилиндра 5 обоих крестообразных элементов 2 и 3 одновременно в одну сто.. рону, то весь схват плоскопараллельно пере- мещается в этом направлении без поворота 45 оси карданного шарнира 8 или шаро- вого шарнира 10, если смещается один из крестообразных элементов 2 или 3, и относирону, то весь схват плоскопараллельно пере- мещается в этом направлении без поворота оси карданного шарнира 8 или шаро- вого шарнира 10, если смещается один из крестообразных элементов 2 или 3, и относисхвата. Если один из этих гидроцилиндров 5 включен в одну сторону смещения, а другой - в другую, то схват поворачивается в соответствующую сторону относпно перпендикулярных плоскостях, так и суперпозиции всех линейных и угловых смешений. Таким образом, осуществляется тактильное позиционирование и установка объекта сборочным или иным технологическим роботом.
ного схвата при подаче жидкости в гидроцилиндр 11.
Электродвигатель 7 через карданный шарнир 8 и передающий вал 9 обеспечивает вращение или поворот схвата согласно требованиям заданного технологического процесса. При этом благодаря карданному щарниру 8 вращение передается вне зависимости от угла положения схвата.
Формула изобретения
1. Запястье манипулятора, снабженное охватом с приводом в виде гидроцилиндра, сопряженным через передаточный вал и карданный щарнир с приводом вращения захвата, отличающееся тем, что, с целью расщирен.ия функциональных возможностей путем повышения подвижности захвата, он снабжен верхним и нижним крестообразными элементами, расположенными нарал- лельно друг другу и перпендикулярно корпусу запястья, выступающий конец каждого из которых является щтоком своего гидроцилиндра, установленного подвижно в поне
речны.х направляюн 1их корпуса, причем точка пересечени;: осей нижнего крестообразного элемента совмещена с точкой пересечения осей карданного нюрнира. а точка пересечения осей верхнего крестообразного эле.мента совмецхена с центром дополнительно введенного ншрового Н1арнира, внутри которого расноложен гидроцнлиндр нри- вода захвата, шток которого сопряжен с передаточным валом посредством допо.ши- тельно выполненных нродолын11х пазов в П1токе.
2. Запястье манинулятора по п. 1, отличающееся тем, что снабжено гидросистемами контроля УСИ.ЛИЙ действуюнщх на захват и контроля линейных и угло1П 1х смещений захвата, в которых обе ветви гидросистемы, связанные с одной из двух пар нротивопо.пожных идроцп. шндров каждого крестообразного з.чемента, подключены к источнику давления через нормально открытьи распределитель, при этом в одну нетвь дополнительно введены нормально закрытый кланан и датчик дав.пения, а в другую ветвь- датчик линейного смен1е11ия.
ЕИШ1Ш-и
Iг/1
Ч
Фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Запястье манипулятора | 1987 |
|
SU1407797A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Запястье манипулятора | 1980 |
|
SU931469A1 |
| Манипулятор | 1990 |
|
SU1722807A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Промышленный робот | 1986 |
|
SU1368166A1 |
| Манипулятор | 1981 |
|
SU971644A1 |
Изобретение относится к области машиностроения, в частности к манипуляторам и промышленным роботам, и может быть использовано при автоматизации технологических процессов. Целью изобретения является расширение функциональных возможностей робота путем повышения подвижности схвата. Запястье содержит два крестообразных элемента 2 и 3, расположенных параллельно друг другу и перпендикулярно оси звена 1. Конец каждого элемента 2 и 3 выполнен в виде штока 4 цилиндра 5, имеющего возможность перемещения в горизонтальных направляющих корпуса. На элементе 2 закреплен электродвигатель 7, вал которого через карданный шарнир 8 связан с передаточным валом 9. В центральной части элемента 3 установлен Н1аровой шарнир 10. Полости противоположных цилиндров 5 каждого элемента 2 и 3 образуют взаимообрат}1ые всасывающую и нагпетаю- шую полости, соединенные гидравлическими ветвями с гидравлической напорной станцией. В одной из этих ветвей установлены дополпительный распределитель и датчик давления, а в другой ветви уста- овлен датчик линейного смещения элемента. 1 з.п. ф-лы, 2 ил. с 3 СО /)Т 00 о СО 4 О ел 5iiii S:ii: i J ii Фиг.1
Редактор Л. Пчолинская Заказ 1257/18
ВНИИПИ Государственного комитета ((,(Р по ле.-|ам ii:«ioiH-vciiiiii :i откцьп iiii
1 13035, Москва. Ж - 35. Рамнская i;af.. ,i. -1 . Производственно-полиграфическое ||ред|1()иятие. г. кг()poл- .i 1 lpi)i KTna i. I
Составитель . I. РЗоскопоГишковп
Те.хрел И. BepL-c Тираж 954
KoppcKKip .Л- ()
I 1()Л 1ИС11(К
| Запястье манипулятора | 1972 |
|
SU512048A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
