1
Изобретение относится к области манипуляторостроения н может бытьиспольэовайо, в частности в копирующих манипуляторах для передачи движения от оператора к захвату через шарниры, образованные соединенными осями звеньями манипулятора.
Известен привод манипулятора,который содержит стержни, установленные в цен- тральных валах звеньев в опорах, допускающих осевое перемещение. Стержни, перемешаясь в осевом направлении, воздействуют с помощью клиновых соединений на наклонные направляющие (клинья), закрегьленные на втулках, установленных на оси щарнира с возможностью осевого перемещения. Таким образом, поступательное движение стержня одного звена преобразуется в поступательное движение втулок вдоль оси шарнира, соединяющей звенья, а затем в поступательное движение стержня второго звена.
Недостатками известного привода явл ются; сложность конструкции, обусловленная наличием кинематических пар (клиновых соединений) требующих высокой точности при
их изготовлении и сборке, большие потери на трение в.клиновых соединениях при перодаче движения приводом, что снижает его I к.П.Д., а такжебольшие габариты наклонных направляющих и втулок, что увеличивает габариты и металлоемкость всего шарнира манипулятора.
С целью упрощения конструкции, ПОБЫШОния коэф(1)ициеита полезного действия и уме шения габаритов концы стержней выполнены в виде плунжеров, входящих в цилиндры, которые установлены в центральных валах на подщипниках и связаны между собой гибкой трубкой, заполненной рабочей жидкостью. «
Для предотвращения скручивания гибкой трубки цилиндры снабжены вилками, входящими в сцепление с осью щарнира.
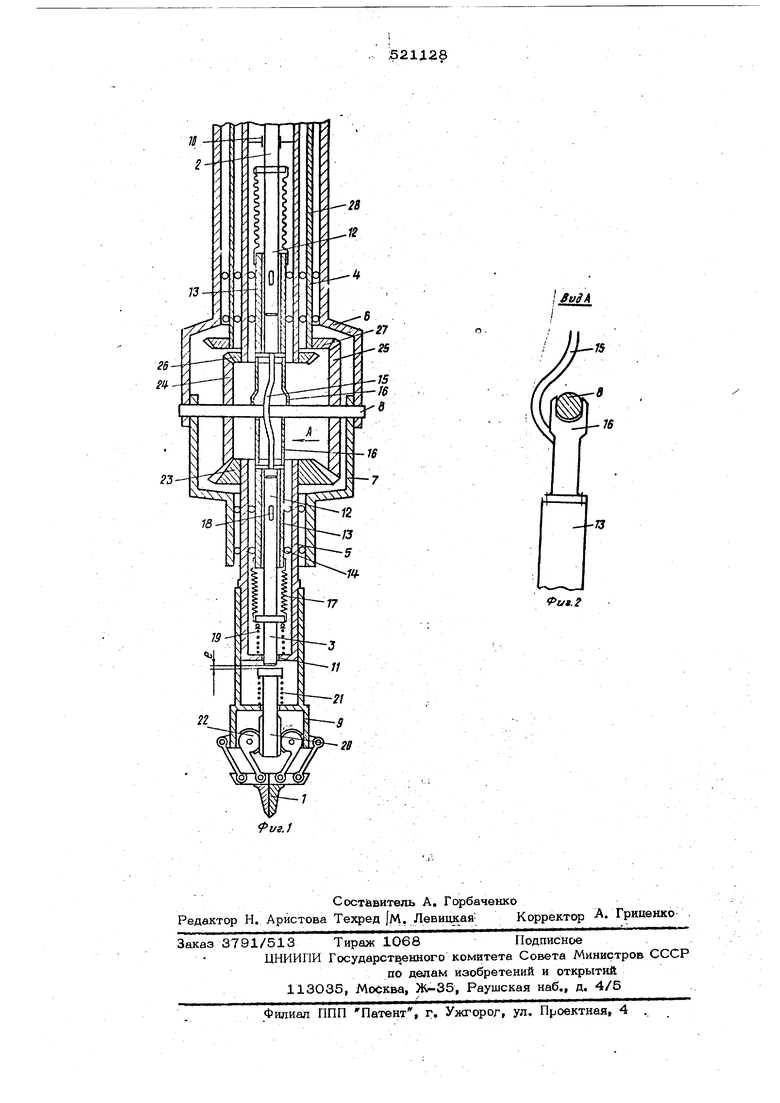
На фиг. 1 изображена схема кистевого щарнира исполнительного органа манипулятора с приводом захвата; на фиг. 2 - внл |пр стрелке А.
Привод захвата 1 манипулятора содержит стержни 2 и 3, размещенниев централышгх валах 4 и 5 звеньев G и 7, со- единенных осью 8 и образующих кистевой liepiiiip манипулятора. Ben 5 совместно «с Эвеном 7 составляет кисть манипулятора, имеющую два движения: вращение и изгиб. На кисти крепится корпус 9 захвата. Стержни 2 и 3 установлены в опорах ДО и 11, допускающих осевое перемещение стержней, а также вращение центральных ва пов 4 и 5 всжруг стержней. Концы стержней выполнены в виде плунжеров 12, входящих в цилиндры 13, которые устан жлены в центральных валах на подшшпшках 14 каЧения. Полости цилиндров заполнены рабочим (Телом (в данном случае жидкостью) и связа йы между собой гибкой трубкой 15, напри- резиновым шлангом. Для предотвращения скручивания гибкой трубки под действием момента трения в подшипниках 14 при вращении валов 4 и 5 цилиндры снабжены вилками 16, входян щими в епление с осью 8 шарнира. В цилиндрах 13 выполнены продольные пазы, служащие для прохода жидкости, герметизация которой обеспечена сильфоном 17. Для разгрузки сильфона от скручивающего момента в одном из пазов цилиндра установлена шпонка 18. Стержень 3 подпружинен возвратной пружиной 19. В корпусе захвата установлена с возможностью осевого перемещения зубчат,ая рейка 20, сна жеЯная пружиной 21 и сиепленнайс секторами 22, которые с помощью рычагов связаны с губками захвата. На валу 5 закреп лено зубчатое коническое колесо 23, которое через промежуточные колеса 24 и 25 связано с колесами 26 и 27, сиДящими на валах 4 и 28. Привод захвата манипулятора работает Следующим образом. Движение от оператора приходит к 2, который получает осевое перемещение вниз, при этом ею плунжер 12 входит в цилиндр 13 и вытесняет жидкость через гибкую трубку 15 в цилиндр 13, приводя в движение стержень 3 и сжимая возвратную гфужину 19. Стержень 3 толкает рейку 20, которая поворачивая зубчатые сектора 22 с рычагами, разводит губки зг,хвата, сжимая при этом пружину 21. Наведя губки захвата на предмет, оператор снимает усилие с рукоятки привода захвата и кинематическая цепь привода захвата йод действием пружйны 19 возвращается в исходное положение. Одновременно пружина 21 через рейку 20 и сектора 22 осуществляем зажим Предмета в губках захвата. При работе манипулятора обеспечиваемся, полная кинематическая независимость при- i вода захвата от всех движений любых звеньев манипулятора, что можно проследнть на примере вращения и изгиба в кистевом шарнире манипулятора. Вращение вала 5 кисти вместе с корпусом 9 захвата происходит при вращении валов 4 и 28| в одну сторону. При этом стержни 2 и 3 не вращаются, так как удерживаются вилками 16, которые, опираясь на оси 8, воспринимают крутящие моменты, возникающие в опорах 10, 11 и подшипнике передаваемые со стержней на цилиндры через шпонки 18. Поскольку не происходит никаких перемещений деталей квнематической цепи привода загвата, его губки остаются неподвижными. Изгиб кисти, т.е. поворот звена 7 относительно звена 6, происходит при вращении . валов 4 и 28 в противоположные стороны. При этом изгибается гибкая трубка 15. Иэменение объема трубки при ее изгибе ничтожно мало, тем не меНее в конструкции привода предусмотрено, чтобы возможное перемещение стержня 3 в сторону рейки .20 поглощалось зазором е между стержнем и рейкой. Поэтому в этом случае губки захвата, остаются неподвижными, не воспринимая никаких усилий со стороны движущихся звеньев манипулятора. Формула изобретени 1. Привод захвата манипулятора для передачи движения через шарниры, образованные соединенными осями звеньями манипулятора, содержащий стержни, установленные в центральных валах звеньев в опорах, установленных с возможностью осевого перемещения, отличающ. ийся тем, что, с целью упрощения .конструкции, повыщ ення к|п.д. и уменьшения габаритов привода , концы стержней выполнены в виде плунжеров, входящих в цилиндры, которые установлены в центральных валах на подшипниках и связаны между собой гибкой трубкой, заполненной рабочей жидко тью. 2. Привод по п. 1, о т л и ч а ю при и с я тем, что, с целью предотвращения скручивания гибкой трубки, цилиндры снабжены вилками, входящими в сцепление р осью шарнира.
Bv3K
/J-75
S
13
.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU503710A1 |
| Привод захвата манипулятора | 1973 |
|
SU547335A1 |
| Привод захвата манипулятора | 1978 |
|
SU674891A1 |
| Привод захвата манипулятора | 1975 |
|
SU549333A1 |
| Привод захвата манипулятора | 1976 |
|
SU607730A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| Манипулятор | 1984 |
|
SU1240581A2 |
| Привод захвата манипулятора | 1979 |
|
SU874333A2 |
| Привод захвата манипулятора | 1978 |
|
SU688328A1 |