1 управления в счетчик 3 кадров заносится 1. В соответствии с заданньм адресом на первых выходах блока 5 памяти устанавливается код длительности кадра и код времени, необходимого для отработки максимальной ошибки, а на вторых выходах - код задания по координате и величина максимальной ошибки. По мере отработки задания импульсы с датчика положения блока 2 исполнительных механизмов поступают на . блок 6 коррекции, где формируется код текущей ошибки, который сравнивается с кодом максимально допустимой ошибИзобретение относится к области автоматики и может найти применение в системах программного управления производственными машинами, напри- мёр, металлорежущих станков, сварочных агрегатов, роботов.
Цель изобретения - повьшение по- мехозащищенности устройства путем исключения остановок, вызванных ошибками отдельных исполнительных механизмов.
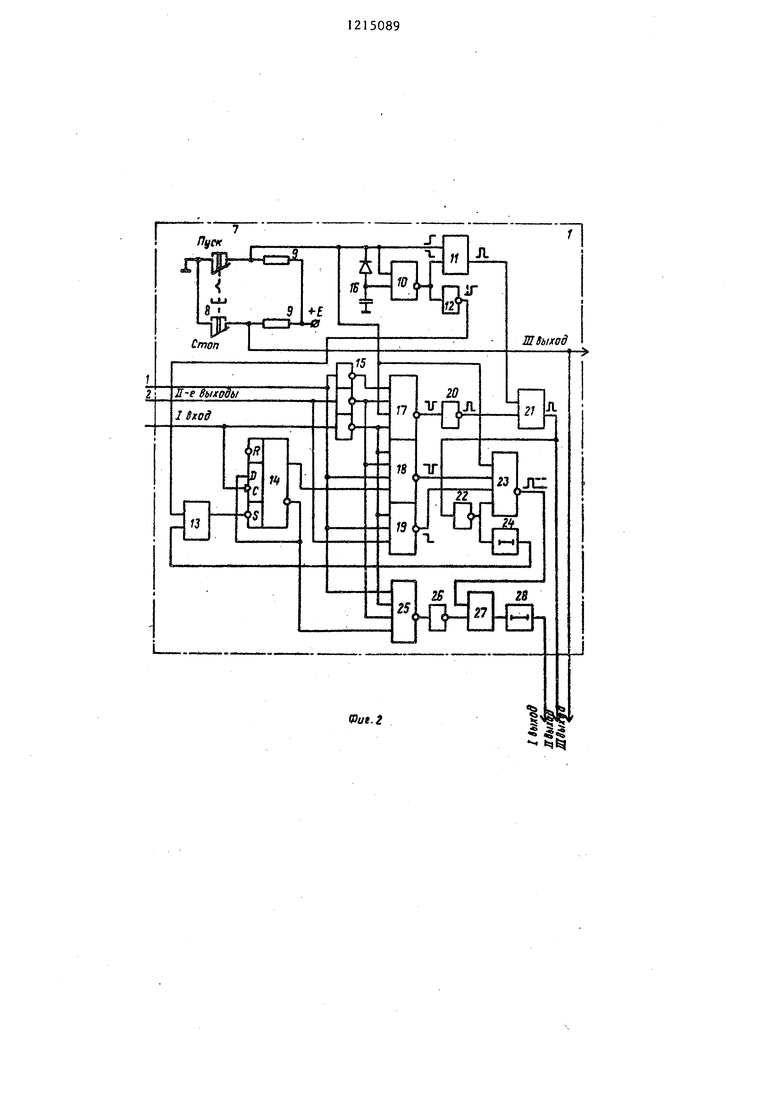
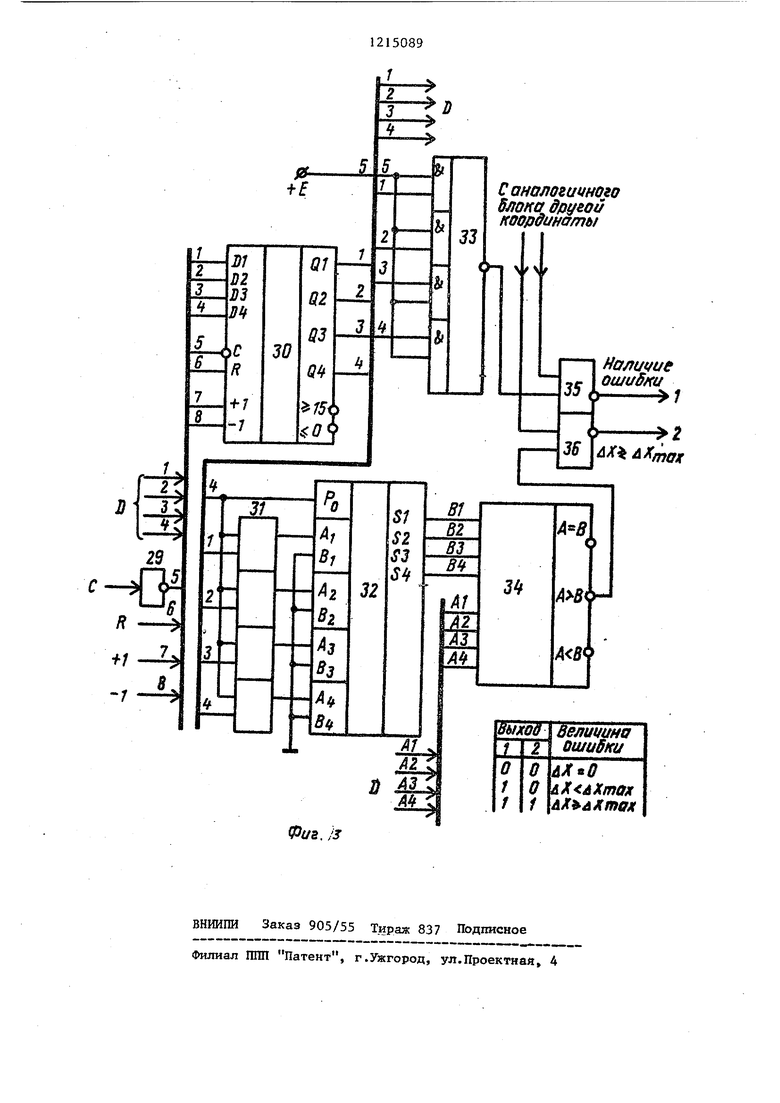
На фиг. 1 представлена структурная схема устройства для программного управления; на фиг. 2, 3 - соот- ветственно принципиальная схема блока управления и блока коррекции данного устройства (для одной координаты).
Устройство для программного управления содержит блок 1 управления блок 2 исполнительных механизмов, счетчик 3 кадров, таймер 4, блок 5 памяти, блок б коррекции.
Блок 1 управления содержит кнопки 7 Пуск и 8 Стоп, резисторы 9 элемент И-НЕ 10, элемент И 11, мент НЕ 12, элемент И 13, триггер 14, группу 15 элементов НЕ, время- задающую цепь 16, элементы 17- 19, элемент НЕ 20, элемент ИЛИ 21, элемент ИЛИ-НЕ 22, элемент И-НЕ 23, элемент 24 задержки, элемент И-НЕ 25, элемент НЕ 26, элемент ИЛИ 27, элемент 28 задержки.
ки. Конец кадра фиксируется таймером 4, по сигналу с которого блоком 1 управления производится анализ кода с управляющих выходов блока.6 коррекции. Если какой-либо привод блока 2 исполнительных механизмов не отработал своего задания, то код ошибки из блока 6 по сигналу с блока 1 переписывается в регистр блока 2- и привод отрабатывает ошибку. После чего увеличивается код счетчика 3 кадров и задание на новый кадр переписывается из блока 5 памяти в блок 6 коррекции. 3 ил.
Блок 6 коррекции содержит элемент НЕ 29, счетчик 30, группу 31 элементов РАВНОЗНАЧНОСТЬ, сумматор 32, элемент 4-2И-ИЛИ-НЕ 33, схему 34 сравнения кодов, элементы И-НЕ 35, 36.
Данное устройство относится к системам координатно-параметричес- кого типа, так как условием перехода с одного кадра программы,на другой является выполнение программы предьщущего кадра как по величине перемещений, так и по времени.
Рассмотрим работу его на примере отработки программы, состоящей из четырех кадров, В исходном состоянии при нажатой кнопке Стоп (отпущенной кнопке Пуск) на первом и третьем выходах блока 1 управления присутствует сигнал, соответствующий 1. Этим запрещена работа блока 2 исполнительных механизмов от программы, но не запрещена установка рабочих органов в исходную точку с помощью кнопок ручного управления в блоке 2 (на фиг. 1 не показаны) . Счетчик 3 кадров и блок 6 коррекции сброшены в ноль. На втором выходе блока 1 управления в исходном состоянии присутствует сигнал О . Блок 5 памяти содержит задание по кадрам для всех координат, код длительности кадра ut код до полнительного времени на отработку ошибки ui и код максимально допустимой ошибки л
mqx
. в ячейках памяти с адресом 0000 блока 5 памяти содержится код 0000 по всем указанным параметрам. На первом выходе таймера 4 присутствует сигнал О. С второго выхода таймера 4 поступает в блок 2 исполнительных механизмов тактовая последовательность , определяющая контурную скорость обработки и обеспечивающая готовность к запуску привода любой координаты в ручном режиме или от программы.
При нажатии кнопки Пуск на втором выходе блока 1 управления формируется управляющий импульс и спустя время С длительности управляющего импульса, первый выход блока I управления переходит в О, При этом заносится 1 в счетчик 3 кадров. В соответствии с адресом (номером кадра) на первых выхода блока 5 памяти устанавливается код длительности кадра ut и код времени At, необходимого для отработки максималь но возможной ошибки Д (,у при заданной контурной скорости обработки I
Код задания на отработку в кадре по данной координате Х(У) и величина максимальной ошибки и с блока 5 памяти записываются по импульсу с второго выхода блока 1 управления в блок 6 коррекции. Появление кода задания X(Y) на информационных выходах блока 6 коррекции при наличии на управляющем входе блока 2 управляющего сигнала в течение позволяет записать задание в регистр блока 2 исполнительных механизмов. Начало его отработки соответствует моменту-перехода в О сигнала на первом выходе блока 1 управления. Таймер 4 начнет отсчет времени: на его первом выходе установится 1,
По мере отработки задания импульсы с датчика положения блока 2 поступают в зависимости от направления движения на суммирующий или вычитающий входы блока 6 коррекции. В процессе отработки кадра в блоке 6 формируется код текущей ошибки, который подается на информационные выходы, а также сравнивается с кодом максимально допустимой ошибки и ,„д . В зависимости от результата сравнения блок 6 формирует на управляющих выходах код, который может принимать три значения: 00, если д х дУ ;
2150894
0, если йХ V U Y Дтах ; Ч. если U X V U Y 5 uniox- /
По окончании кадра на первом выходе таймера 4 формируется управляю- щий сигнал О. По этому сигналу блок 1 управления анализирует код с управляющих выходов блока 6 коррекции. Если код 00, т.е. ошибки . йХ, ДУ О, то на первом и втором выходах блока управления формируется импульс, который увеличивает код счетчика 3 кадров на I, переписывает задание на следующий кадр из блока 5 памяти в блок 6 коррекции и затем в блок 2 исполнительных механизмов.
Если в процессе отработки кадра за время it один из приводов или все приводы не отработают своего задания, то по сигналу с таймера 4 об окончании кадра блок 1 управления формирует импульс на первом выходе , по которому код ошибки из бло- -, ка 6 будет переписан в .регистр блока 2. Так как на втором выходе блока 1 импульс по окончании кадра не появился, то таймер 4 продолжает от15
20
счет времени до t &t+ &t . Привод отрабатывает ошибку. В момент времени t At+ it таймер 4 прекращает отсчет времени и вновь формирует импульс О. Если ошибка по всем координатам теперь равна нулю, то блок 1 управления сформирует управляющие импульсы на первом и втором выходах, тем самым разрешая пег реход к следующему кадру Код счетчика 3 кадров увеличивается на единицу. Задание на новый кадр из блока
5 памяти переписывается в блок 6 коррекции и в блок 2 исполнительных механизмов и т.д. Если за время t &t+ At ошибка все-таки не отработана, то на первом выходе блока
управления появится 1, запрещающая работу блока 2 исполнительных механизмов до устранения аварийной ситуации. Аналогичная остановка может возникнуть также, если ошибка
больше допустимой, В этом случае остановка произойдет сразу же .по окончании кадра. Для возобновления работы вначале надо выключить устройство кнопкой Стоп, затем устранить причину возникновения аварийной ситуации и после этого повторным нажатием кнопки Пуск запустить систему в работу.
Нажатие кнопки Стоп приводит к сбросу в ноль счетчика 3 кадров, блока 6 коррекции и запрету работы блока 2 исполнительных механизмов от программы.
Блок управления 1 возвращает в исходное состояние счетчик блока 6 коррекции и счетчик 3 кадров, управляет записью задания на следующий кадр из блока 5 памяти в блок 6 коррекции и блок 2 исполнительных механизмов, а также перезаписью кода ошибки в конце кадра (если она меньше л „„х 3 блока 6 коррекции в блок 2; запускает таймер 4 в начале каждого кадра, запрещает работу устройства, если ошибка в момент време
ни t ut или t ut+ fit больше
допустимой или не устранена за вре-
мя t At+ it 5 разрешает работу блока исполнительных механизмов 2 от программы только при нажатой кнопке .
При нажатой кнопке Пуск с по- мощью схемы задержки на элементе 10 и элементе 1 формируется импульс, который, пройдя через элемент ИЛИ 21 появляется на втором выходе блока 1 и записывает 1 в счетчик кадров. Этот же импульс, пройдя через элементы 22, 23, 27 и элемент задержки 28, появляется на первом выходе блока 1 управления. Импульс с элемента ИЛИ 21, пройдя через элемент НЕ 22 и элемент 24 задержки, подтверждает исходную установку триггера на прямом выходе. На элементах И-НЕ 17, 18, 19, 25 реализован дешифратор, анализирующий код с блока 6 коррекции в момент появления импульса с таймера 4. Так, если код с блока 6 в конце кадра (t &t) равен 00, то при нажатой кнопке Пуск на входе элемента 17 устанав- ливаются четыре I, поэтому на ее выходе установится О, что приведет к появлению управляющего импульса на втором и с задержкой на первом выходах блока I управления и к переходу на следуюп1Ий кадр.
На входе элементов IS 19, 25 в этот момент совпадение отсутствует и на их выходах останется 1. Триг- гер 14 в исходном состоянии через задержку на элементе Й-НЕ 10 и элемент И 13 установлен в 1 на прямом выходе. Приходящий при t it с таймера 4 импульс задним фронтом (переход из О в г) опрокинет триггер 14 в О. Если кадр отработан с ошибкой по одной из координат, то с таймера 4 придет повторный импульс при t ut At и задним фронтом вовратит триггер в состояние 1. Таким образом, триггер 14 в каждом кадре считает число импульсов с таймера 4,
Совпадение четырех 1 на входе элемента 18 наступит при t at, если по одной из координат привод отработал задание с ошибкой uTviYi U j,,,, , т.е. код. на вторых входах равен 10, При этом на первом выходе блока 1 управления появляется импульс, который перепишет из блока 6 коррекции в блок 2 исполнительных механизмов код ошибки. На втором выходе блока 1 управляющий сигнал отсутствует, что исключает смену кадра.
Элемент И-НЕ 19 при совпадении на входе д XV & У г д переходит в О и запрещает работу блока 2 от программы до устранения аварийной ситуации. Аналогично действует и элемент 25; если за время t bt+ ut ошибка полностью на отработана, то на-выходе элемента 25 установится О, а на первом выходе блока 1 - 1, что также запрещает работу блока 2 от программы до устранения причины сбоя. Сигнал 1 на третьем выходе блока 1 управления появляетс при нажатой кнопке Стоп. Он сбрасывает в ноль счетчик 3 кадров и реверсивный счетчик 30 блока 6 коррекции. Элемент 24 задержки не позволяет сформировать на втором выходе импульс достаточной длительности и исключить неопределенность в работе триггера 14. Элемент 28 задержки на фиг, 3 позволяет сформировать управляющий импульс на первом выходе блока 1 управления с задержкой по отношению к импульсу с второго выхода блока 1, Благодаря задержке импульс записи на входе блока 2 появится после того, как сменится номер кадра и задание на кадр будет записано в блок 6 коррекции.
Блок 6 коррекции выявляет ошибку в отработке задания по каждой координате в каждом кадре, анализируя ошибки всех координат и в зависимоети от результата анализа формирует на управляющих выходах соответствующий код. Задание на текущий кадр поступает с блока памяти на В -входы реверсивного счетчика 30, Наличие на С-входе счетчика О позволяет записать информацию в счетчик, откуда она поступает на информационные выходы для записи в блок 2 исполнительных механизмов и в схему 34 сравнения кодов. По мере отработки задания с датчика обратной связи блока 2 на суммирующий (+1) или вычитающий (-1) входы счетчика 30 поступают импульсы, уменьшая содержимое счетчика 30. Схема 34 сравни- вает код со счетчика 30 с кодом максимально допустимой ошибки Л я блока 5 памяти и, если ошибка по координате больше Д щах то на выходе А В схемы 34 появится О, а на выходе элемента И-НЕ 36 - 1. Элемент
4-2И-ИЛИ-НЕ 33 фиксирует точную отработку задания, т.е. если на всех выходах счетчика 30 будут нули, то на выходе элемента 33 появится 1 и соответственно на выходе элемента И-НЕ 35 появится О. Группа 31 элементов РАВНОЗНАЧНОСТЬ и ее сумматор 32 осуществляют анализ к,рда со счетчика 30 и, если он окажется дополнительным (ошибка отрицательна), то преобразуют его в прямой для сравнения его модуля с кодом ошибки
maxФормула изобретения
Устройство для программного уп- 5 равления, содержащее блок управления, блок исполнительных механизмов, счетчик кадров, а также блок памяти и таймер, управляющий вход которого соединен с вторым выходом блока уп- 0 равления, первый вход которого подключен к первому выходу таймера, а информационные входы последнего соединены с первыми выходами блока памяти, отличающееся тем, 5 что, с целью повышения помехозащищенности устройства, оно содержит блок коррекции, суммирующий и вычитающий входы которого соединены с одноименными выходами блока исполнительных
0 механизмов, информационные входы - с вторыми выходами блока памяти, информационные выходы - с одноименными входами блока исполнительных механизмов, управляющие выходы - с вторыми входами блока управления, вход записи блока коррекции объединен с управляющим входом таймера и счетным входом счетчика кадров, а вход сброса - с одноименным входом
0 счетчика кадров и третьим выходом блока управления, первый выход которого подключен к управляющему входу блока исполнительных механизмов, тактовый вход которого соединен с вто5 рым выходом таймера, информационные выходы счетчика кадров подключены к адресным входам блока памяти.
5
(Put. I
0ff
W
or
S2 Q3 Q
-1
15b
±
JL
29
7:3
f/
r
2,
4
d
31
AI Bj
AZ 82
АЗ Вз
A Bit
Фиъ. /s
5J
С аналогичного Влока fffftfeoif коор&иноты
&
55
О
Hofluttue ошидки
36
г
ЛХ лХтах
2
SI
S2
S3
s
B1
62
S3
ВЧ
4/
3
АЧ
Ж
лг
z 4

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления циклическими процессами | 1983 |
|
SU1124247A1 |
| Многопрограммный регулятор температуры | 1983 |
|
SU1136123A1 |
| Многопрограммный регулятор температуры | 1983 |
|
SU1087951A1 |
| Система управления гибким производственным комплексом | 1987 |
|
SU1513417A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Система для автоматического числового управления координатными перемещениями при обработке изделий микроэлектроники | 1990 |
|
SU1835534A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Функциональный интерполятор | 1984 |
|
SU1168900A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
Изобратение относится к области автоматики и может найти применение в системах программного управления производственных машин, например металлорежущих станков, сварочных агрегатов, роботов. Решается задача автоматической коррекции отклонений фактической траектории от программной вследствие воздействия случайных факторов, после чего устройство воз вращается к выполнению программ. Этим достигается повьшение помехозащищенности устройства. При пуске ий блока с S
| Патент США № 4084083, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ выявления степени износа подшипников качения главного вала ветроэнергетической установки | 2024 |
|
RU2821843C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для контроля параметров объекта | 1978 |
|
SU697979A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
