2. Механизм по п. чающийся
1
о т л и тем, что он снабжен раэмещеннь1м на основании упором и взаимодействующим с последним одноплечим рычагом, связывающим упругое звено с основанием.
Изобретение относится к машиностроению, а именно к рычажно-зубча- тым преобразователям движения, и может быть использовано в автоматических устройствах, в частности в манипуляторах и роботах.
Цель изобретения - расширение кинематических возможностей механизма, что позволяет в широких пределах изменять закон движения исполнительного звена.
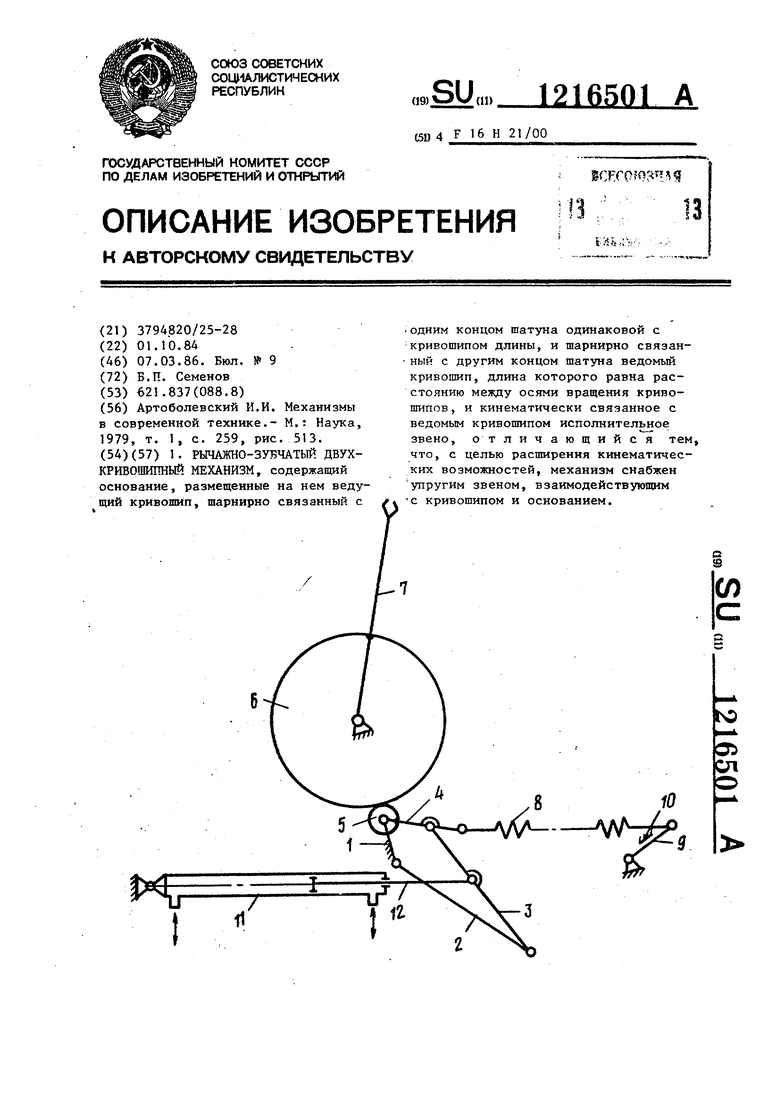
На чертеже показана схема механизма .
Механизм содержит основание 1, размещенные на нем ведущий кривошип 2, шарнирно связанный с последним одним концом шатун 3 одинаковой с ним длины и шарнирно связанный с другим концом шатуна 3 ведомый кривошип 4, длина которого равна расстоянию между осями вращения кривошипов 2 и 4.
С кривошипом 4 жестко связано ведущее колесо 5 зубчатой передачи, ведомое колесо 6 которой жестко связано с исполнительным звеном 7 в виде, например,захвата манипулятора.
Для исключения мертвого положения и изменения направления вращения ведомого кривошипа 4 последний связан с основанием 1 упругим звеном в виде например, пружины 8. Для регулировки натяжения пружины 8 она одним концом связана с одноплечим рычагом 9, размещенным на основании 1. Для ограничения поворота рычага 9 на основании 1 установлен упор 10.
Для расширения пределов регулировки закона движения ведомого кривошипа 4 с основанием 1 шарнирно связан цилиндр I1 двухстороннего действия, шток 12 которого шарнирно связан с шатуном 3,
3. Механизм, по пп. 1 и 2, отличающийся тем, что он снабжен цилиндром двухстороннего действия, шарнирно связанным с основанием, а шток цилиндра шарнирно связан с шатуном.
Механизм работает следующим образом.
Б исходном положении ведущий кривошип 2 расположен по линии, проходящей через оси вращения кривошипов 2 и 4, так, что шарнир, связывающий кривошип 2 с шатуном 3, расположен с противоположной стороны от оси вращения кривошина 4 относительно оси вращения кривошипа 2. Через 180 кривошип 2 совмещается с шатуном 3, а ось шарнира, связывающего кривошип 4 с шатуном 3, совмещается с осью вращения кривошипа 2.
5 При дальнейшем повороте кривошипа 2 кривошип 4 из этого положения мо- лсет перейти в любое из следующих состояний - вращение в прежнем направлении, остановка или вращение в про- 0 тивоположном направлении. Это состояние определяется соотношением вращаю- щегося момента, развиваемого маховой массой кривошипа 4, и усилия, возникающего при растяжении пружины 8. 5 Если усилие пружины 8 меньше вращающегося момента кривошипа 4, последний враш:ается в прежнем направлении.
Если усилие пружины 8 (с учетом Q сил трения) .равно этому моменту, то после контакта рычага 9 с упором 10 и соответствующего растяжения пружины 8 кривошип 4 останавливается, а кривошип 2 и шатун 3 вращаются вхолостую.
Если в этот момент рычаг 9 повернуть в обратную сторону, усилие пружины 8 превьш1ает маховой вращающий момент кривошипа 4, и последний вращается в противоположном направлении.
Ци-гиндр I 1 , воздействуя своим штоком 2 на лгатун 3, поворачивает по- следний вокруг шарнира, соединяющего
5
312165014
его с кривошипом 2. При этом в зави- Поскольку с кривошипом 4 жестко
сймости от скорости и направлениясвязано ведущее колесо 5 зубчатой
перемещения штока 12 скорость вра-передачи, то в итоге исполнительное
щения кривошипа 4 при постоянстве-звено 7 имеет широко регулируемые
скорости вращения кривошипа 2 уве-скорости и углы поворота, а также
личивается, уменьшается или равназаданные моменты и длительность
нулю (в заданных пределах времени).остановок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Фрикционная муфта механического пресса | 1980 |
|
SU872307A1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ВЫХОДНОГО ЗВЕНА КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 1993 |
|
RU2066858C1 |
| Рычажно-зубчатый двухкривошипный механизм | 1985 |
|
SU1305479A2 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| СТАНОК-КАЧАЛКА | 1995 |
|
RU2105197C1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |
| Зубчато-рычажный механизм с остановками | 1987 |
|
SU1599606A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике.- М.: Наука, 1979, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Арматура для железобетонных свай и стоек | 1916 |
|
SU259A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОДУКТОВ КОНДЕНСАЦИИ ФЕНОЛОВ С ФОРМАЛЬДЕГИДОМ ИЛИ ЕГО ПОЛИМЕРАМИ | 1925 |
|
SU513A1 |
