20
25
Изобретение относится к машинотроению, а именно к рычажным преобраователям движения, может быть исполь- овано в приводах различных механизов с периодической остановкой одно- j о из элементов и является усовершенствованием изобретения по авт. св. № 1216501.
Целью изобретения является расширение кинематических возможностей ме- Ю ханизма путем обеспечения периодических остановок ведомого кривошипа в фиксированном положении на прямой, соединяющей оси вращения ведущего и ведомого кривошипов.
I На фиг. 1 представлена принципиальная схема механизма, пример его использования в приводе токарного станка; на фиг, 2 - то же, пример использования в устройстве для позиционной обработки деталей. , Механизм содержит основание 1, шарнирно связанные с основанием 1 ведомый 2 и ведущий 3 кривошипы. Шатун 4 посредством шарниров связан с ведущим и ведомым кривошипами 3 и 2. При этом расстояние между осями шарниров ведущего кривошипа 3 вдвое больше расстояния между осями шарниров ведомого 2, которое равно расстоянию между осями шарниров основания 1 , а расстояние между осями шарниров шатуна 4 равно расстоянию между осями шарниров ведущего кривошипа 3.
Ведомый кривошип 2 посредством пружины 5 связан с рычагом 6, установленным с возможностью вращения на основании 1.
Упор 7, связанный с основанием 1, предназначен для фиксации положения рычага 6. На одном из элементов механизма , например на основании 1 (фиг.1) или на ведущем кривошипе 3 (фиг.2), установлен упор 8, предназначенный для взаимодействия с шатуном 4.
При использовании механизма в качестве преобразователя движения в приводе токарного станка (фиг.1) с ведущим кривошипом 3 жестко связано колесо 9 зубчатой передачи, шестерня 10 которой связана с валом 11 шпинделя (не показан) токарного стан- ка, на котором крепится обрабатываемая деталь 12. Шарнир ведомого кривошипа 2 связан с ходовым винтом 13 токарного станка, который взаимодействует с гайкой суппорта 14 (не по30
35
40
5
50
20
25
аь-j - Ю
ьу
-3054792
казана). На последнем укреплен обрабатывающий деталь 12 резец 15.
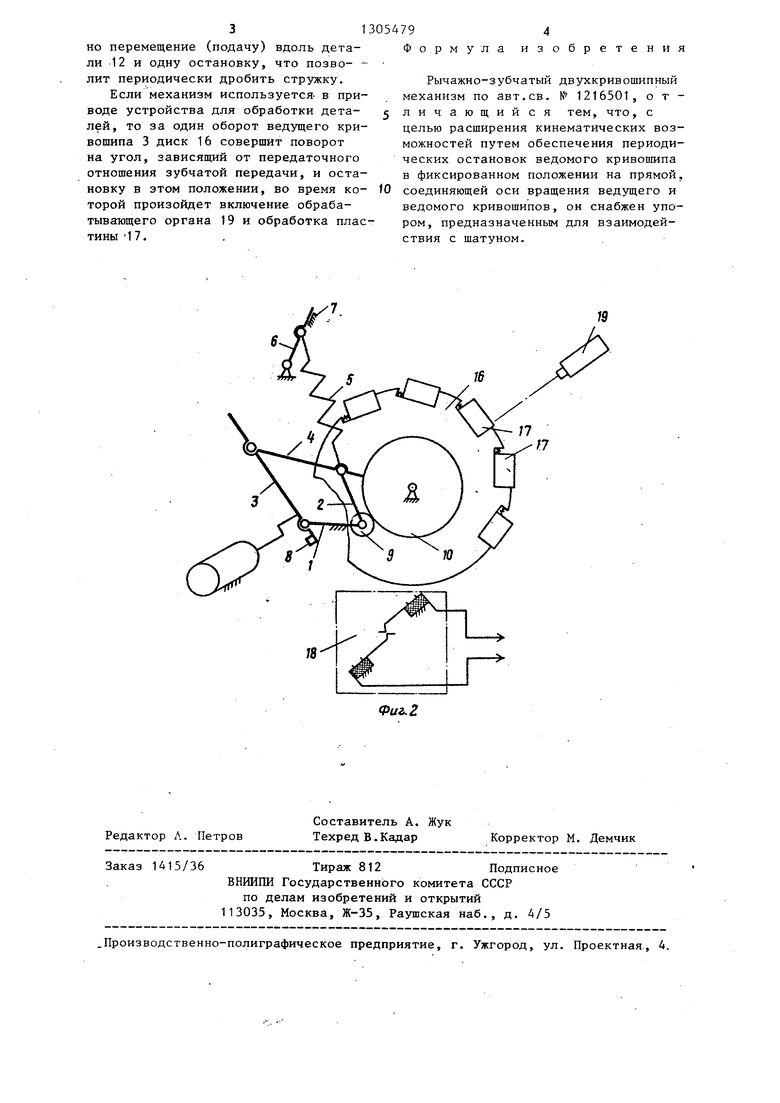
При использовании механизма в качестве преобразователя движения в устройстве для. позиционной обработки деталей (фиг.2) колесо 9 зубчатой передачи жестко связано с ведомым кривошипом 2, а шестерня 10 жестко связана с диском 16, установленным с возможностью вращения на основании 1. В диске 16 выполнены гнезда, например , для твердосплавных пластинок 17. Контактор 18 предназначен для включения обрабатывающего органа, например лазера 19 и взаимодействует с одним из элементов механизма.
Механизм работает следующим образом.
Рычаг 6 взаимодействует с упором 7, при этом усилие от натянутой пружины 5 передается на шарнир ведомого кривошипа 2. В исходном положении ведущий кривошип 3 расположен по линии, проходящей Через оси вращения кривошипа 2 и 3 так, что шарнир, связывающий ведущий кривошип 3 с шатуном 4, расположен с противоположной стороны от оси вращения ведомого кривошипа 2 относительно оси вращения веду- 3. При повороте последнего на
совершает по30
щего 180°
ведомый кривошип 2 .ворот на 360 , а шатун 4 обходит
упор 8. При дальнейшем повороте веду о
35
40
щего кривошипа 3 на 180 упор 8 препятствует перемещению шатуна 4 относительно основания 1, и шатун 4 начинает вращаться совместно с ведущим кривошипом 3 относительно оси вращ&- ния последнего. В это время ведомый кривошип расположен по линии, соединяющей оси вращения кривошипов, и фиксирован в этом положении.
При повороте рычага 6 против часовой стрелки от упора 7 пружина 5 не
5 оказывает воздействие на ведомый кривошип 2. В этом случае приведенный момент на ведомом кривошипе 2 будет препятствовать его повороту, ведомый кривошип 2 остается неподвижным, а шатун 4 продолжает совместное вращение с ведущим кривошипом 3.
В результате, при использовании механизма в приводе токарного станка обрабатываемая деталь 12 за один
55 оборот ведущего кривошипа 3 совершит число оборотов, кратное передаточному отношению зубчатой передачи, а суппорт за этот период, совершит од50
31
но перемещение (подачу) вдоль детали 1 2 и одну остановку, что позво- - лит периодически дробить стружку.
Если механизм используется- в приводе устройства для обработки дета- лей, то за один оборот ведущего кривошипа 3 диск 16 совершит поворот на угол, зависящий от передаточного отношения зубчатой передачи, и остановку в этом положении, во время ко- торой произойдет включение обрабатывающего органа 19 и обработка пластины 17.
Формула изобретения
Рычажно-зубчатый двухкривошипный механизм по авт.св. № 1216501, отличающийся тем, что, с целью расширения кинематических возможностей путем обеспечения периодических остановок ведомого кривошипа в фиксированном положении на прямой, соединяющей оси вращения ведущего и ведомого кривошипов, он снабжен упором, предназначенным для взаимодействия с шатуном.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ С ПЕРИОДИЧЕСКИМИ ОСТАНОВКАМИ В.И. ПОЖБЕЛКО | 2003 |
|
RU2252350C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |
| Устройство для алмазного выглаживания цилиндрических деталей | 1988 |
|
SU1720845A1 |
| Рычажно-зубчатый двухкривошипный механизм | 1984 |
|
SU1216501A1 |
| Кривошипно-кулисный механизм с выстоем ведомого звена | 1988 |
|
SU1504433A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2246056C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Шарнирный механизм | 1986 |
|
SU1397652A2 |
| Пространственный рычажный механизм с периодическими остановками | 1985 |
|
SU1307134A1 |
Изобретение относится к машиностроению и является усовершенствованием технического решения по авт.св. № 1216501. Целью дополнительного изобретения является расширение кинематических возможностей механизма путем обеспечения периодических остановок ведомого кривошипа. Механизм содержит основание 1, шарнирно связанные с ним ведущий 3 и ведомьм 2 кривошипы, шарнирно связанные между собой посредством шатуна 4. Ведомый кривошип 2 посредством пружины 5 связан с рычагом 6, установленным с возможностью вращения оснований 1 и взаимодействующим с упором 7. На одном из элементов механизма, например на основании 1 или на ведущем кривошипе 3, установлен упор 8, пр дназначенный для взаимодействия с шатуном 4. За половину оборота ведущего кривошипа 3 ведомьй кривошип 2 совершает один оборот,а при дальнейшем вращении ведущего кривошипа 3 на половину оборота за счет взаимодействия шатуна 4 с упором 8 ведомый кривошип 2 совершает фиксированную остановку в положении, совпадающем с линией,соединяющей оси вращения ведущего и ведомого кривошипов 3 и 2. 2 ил. « (Л ho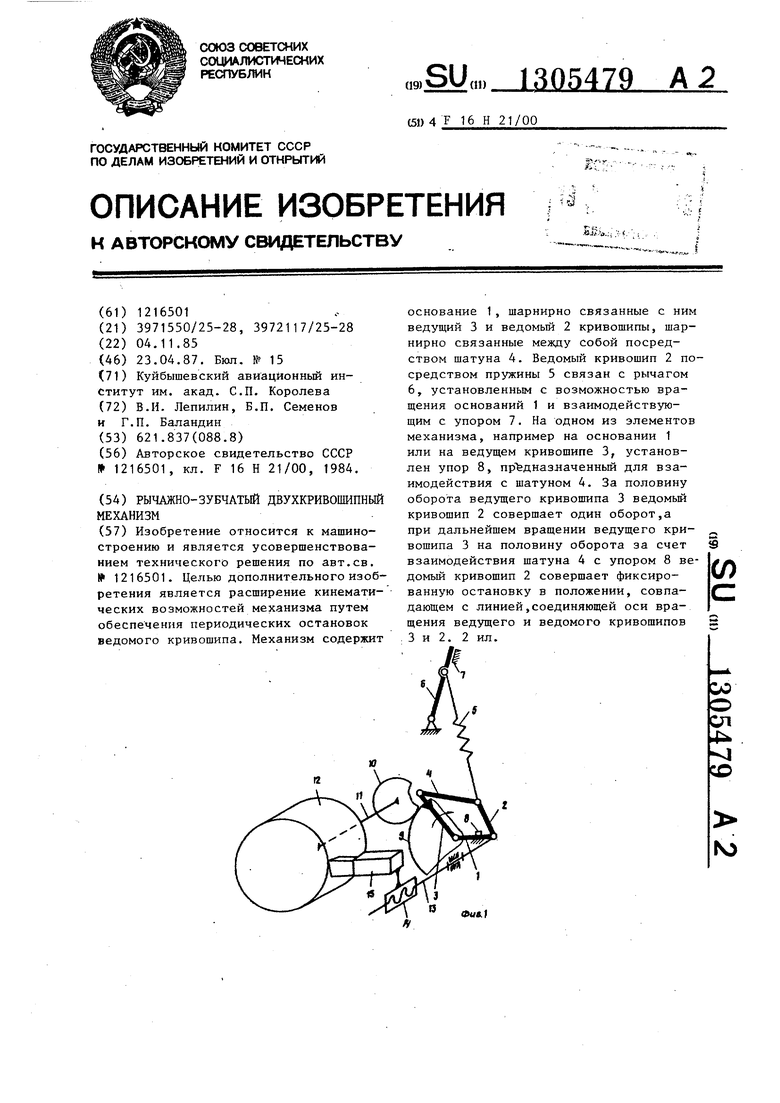
19
Редактор Л. Петров
Составитель А. Жук Техред В.Кадар
1415/36
Тираж 812Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4.
Корректор М. Демчик
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
