15
20
Изобретение,относится к подъемно-транспортному машиностроению, а именно к телеёкопическим штангам грузоподъемных устройств, и может быть использовано при перегрузке 5 элементов ядерного реактора.
Цель изобретения - повьшгение надежности телескопической штанги грузоподъемного устройства.
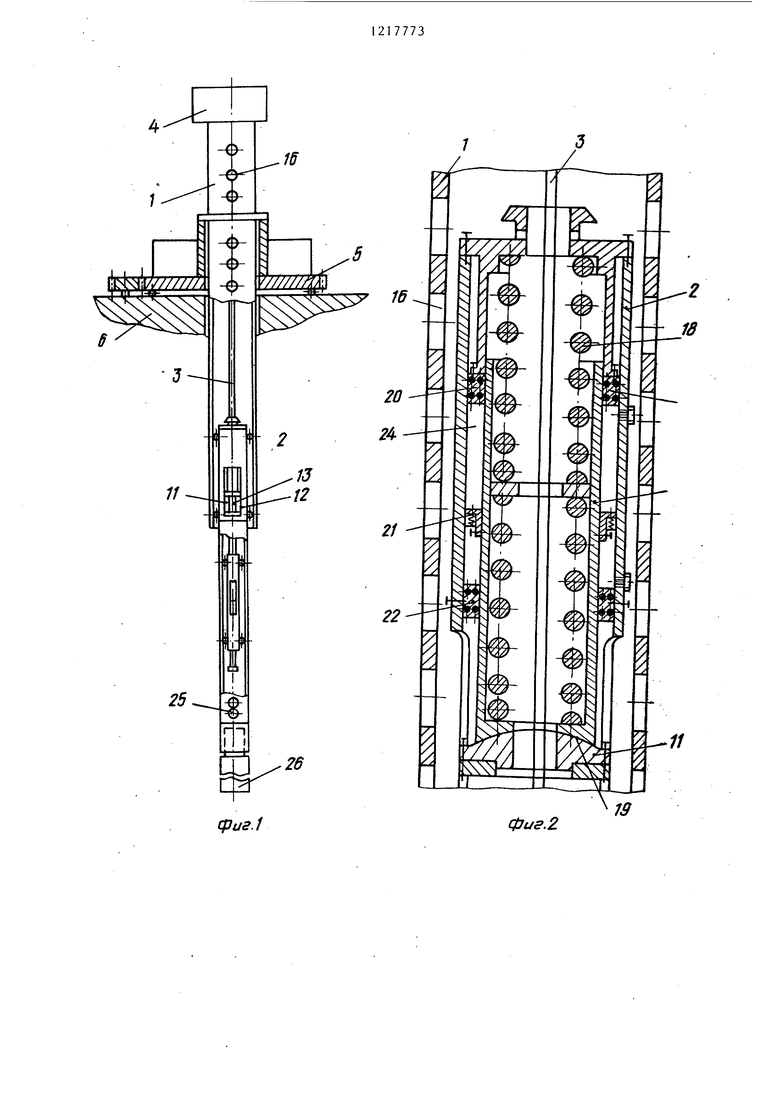
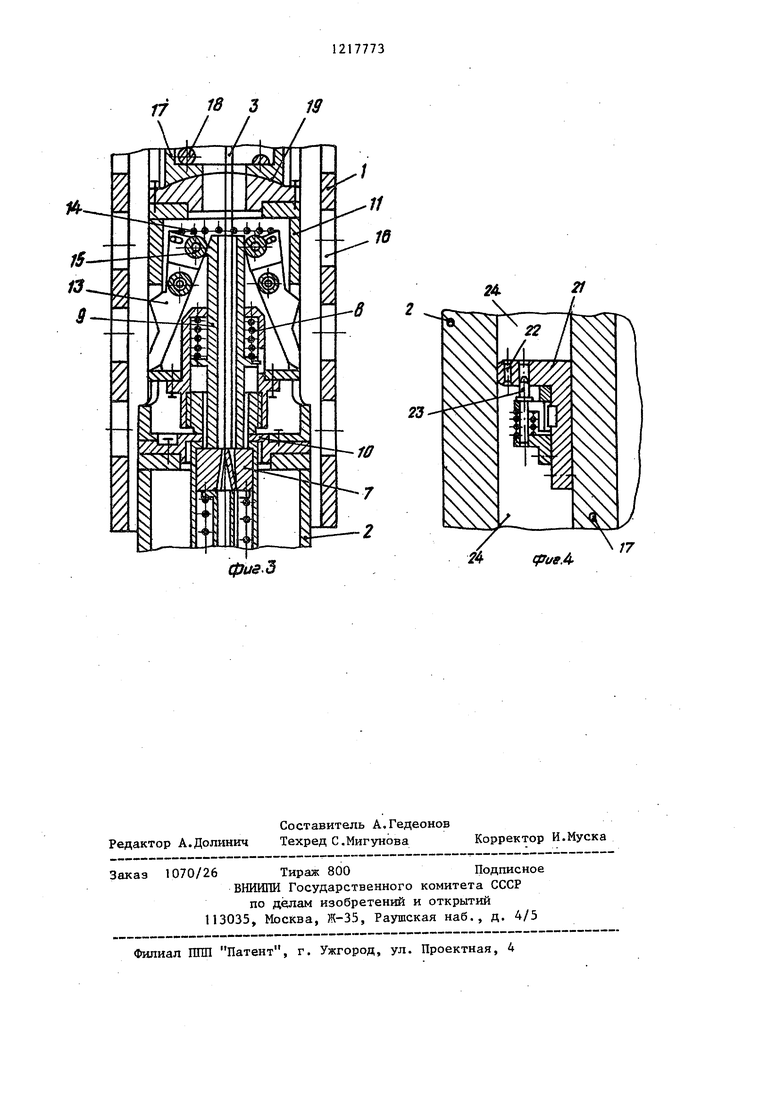
На фиг. 1 изображена телескопичес- кая штанга грузоподъемного устройства, общий вид; на фиг. 2 - часть штанги с амортизатором и гидродемпфером, общий вид; на фиг. 3 - часть штанги с подвижной обоймой и ловителями, общий вид; на фиг. 4 - поршень гидродемпфера, общий вид.
Телескопическая штанга грузоподъемного устройства содержит внешнюю 1 и внутреннюю 2 секции, последняя из которых посредством гибкого органа 3 соединена с механизмом 4 ее подъема, закрепленным в верхней части секции 1. Секция 1 штанги закреплена на поворотной платформе 5, установленной на основании 6. Секция :2 содержит коуш 7, в котором закреплен гибкий орган 3. К коушу 7 пружиной 8 прижата подвижная втулка 9, установленная в направляющих 10 секции 2. Подвижная обойма 11 установлена в продольных направляющих 12 секции 2 и несет на себе ловители 13, одни концы которьк соединены друг с другом пружиной 14 и взаимодействуют через ролики 15 со втулкой 9. Секция 1 выполнена с отверстиями 16 для ловителей 13. На обойме 11 установлен стакан 17 амортизатора, в котором расположена пружина 18, упирающаяся в торец секции 2. Сопряженные поверхности 19 торцов обоймы 11 и стакана 17 выполнены сферическими. Гидродемпфер содержит кольцевые уплотнения 20 и кольцеобразный поршень 21, выполненный с дроссельным каналом
12177732
22 н подпружиненным клапаном 23., Поршень 21 надет на стакан 17 и расположен в полости 24, образованной стенками секции 2, стакана 17 и ус- 5 тановленными между ними уплотнениями 20. Полость 24 частично заполнена жидксустью. На конце секции 2 установлен грузозахватный орган 25 для элементов 26 реактора.
Телескопическая штанга грузоподъемного устройства работает следующим образом.
25
30
35
40
45
Для захвата элемента 26 реактора грузозахватный орган 25 секции 2 штанги наводится на элемент, поворотом платформы 5 достигается захват элемента 26, после чего секция 2 штанги поднимается вместе с элементом 26. В случае обрьша гибкого органа 3 механизма 4 подъема секция 2 вместе с грузозахватным органом 25 и элементом 26 начнет падать вниз. В связи с отсутствием усилия, действовавшего на втулку 9 со стороны коуша 7, втулка 9 под дейст- вием предварительно сжатой пружины 8 начинает перемещаться вниз, при этом ролики 15 выходят из контакта со втулкой 9 и под действием пружины 14 ловители 13 выходят из габарита секции 2. После попада- ния ловителей 13 в отверстия 16 секции 1 обойма П и стакан 17 окажутся неподвижными. Секция 2 начинает сжимать пружину 18 амортизатора , при этом открывается клапан 23 и гидродемпфер почти не препятствует перемещению секции 2. После остановки секции 2 за счет сжатия пружины 18 амортизатора начинается обратный ход секции 2 под действием сжатой пружины 18, однако колебаний секции 2 не возникает, так как при обратном ходе секции 2 клапан 23 закрыт и гидродемпфер совершает свой рабочий ход.
Для захвата элемента 26 реактора грузозахватный орган 25 секции 2 штанги наводится на элемент, поворотом платформы 5 достигается захват элемента 26, после чего секция 2 штанги поднимается вместе с элементом 26. В случае обрьша гибкого органа 3 механизма 4 подъема секция 2 вместе с грузозахватным органом 25 и элементом 26 начнет падать вниз. В связи с отсутствием усилия, действовавшего на втулку 9 со стороны коуша 7, втулка 9 под дейст- вием предварительно сжатой пружины 8 начинает перемещаться вниз, при этом ролики 15 выходят из контакта со втулкой 9 и под действием пружины 14 ловители 13 выходят из габарита секции 2. После попада- ния ловителей 13 в отверстия 16 секции 1 обойма П и стакан 17 окажутся неподвижными. Секция 2 начинает сжимать пружину 18 амортизатора , при этом открывается клапан 23 и гидродемпфер почти не препятствует перемещению секции 2. После остановки секции 2 за счет сжатия пружины 18 амортизатора начинается обратный ход секции 2 под действием сжатой пружины 18, однако колебаний секции 2 не возникает, так как при обратном ходе секции 2 клапан 23 закрыт и гидродемпфер совершает свой рабочий ход.
25
(риг.1
11
фиг.2
1
физ-д
cpt/вЛ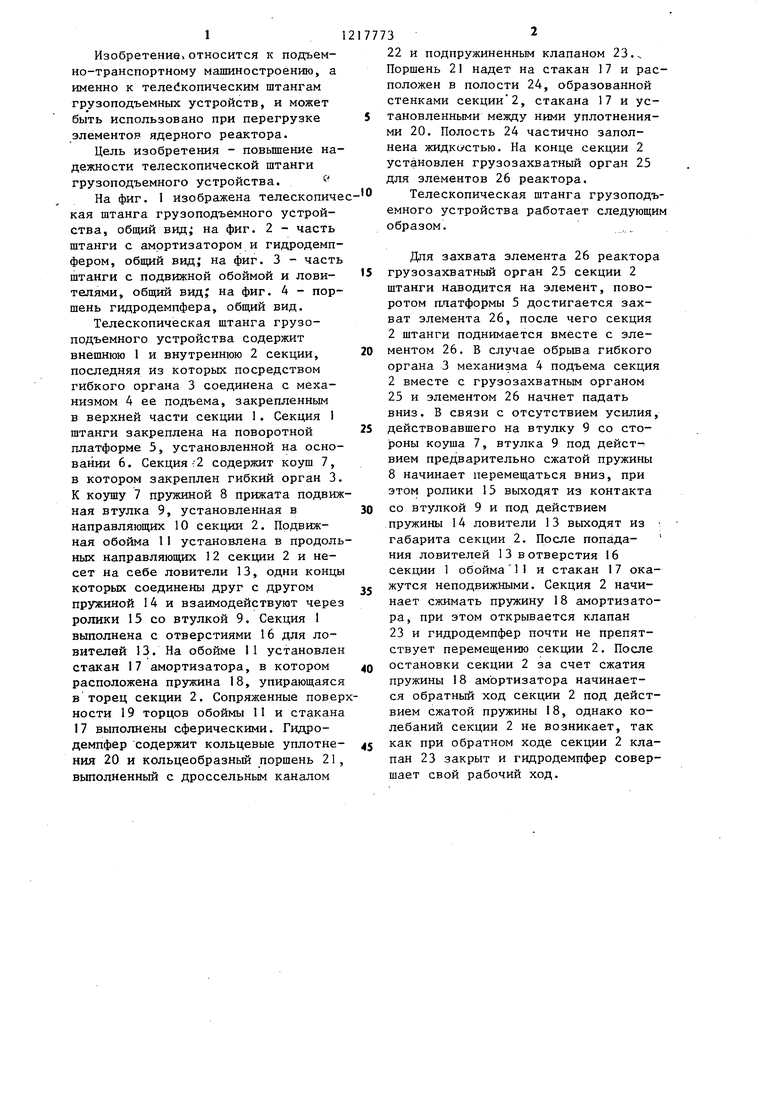
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное устройство | 1983 |
|
SU1270101A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЙ В СКВАЖИНЕ | 1992 |
|
RU2041335C1 |
| Захватное устройство для раскрывающихся емкостей | 1983 |
|
SU1129168A1 |
| Захватное устройство для грузов с цапфами | 1983 |
|
SU1245539A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Грузозахватная система | 1990 |
|
SU1787918A1 |
| УСТАНОВКА ДЛЯ БЕТОНИРОВАНИЯ НАБИВНЫХ СВАЙ | 1998 |
|
RU2139978C1 |
| Пробоотборник | 1979 |
|
SU989355A1 |
| Автономный пробоотборник | 1979 |
|
SU989361A1 |
| ТЕЛЕСКОПИЧЕСКАЯ ШТАНГА ПЕРЕГРУЗОЧНОГО МОСТА | 1968 |
|
SU231082A1 |

Редактор А.Долинич
Составитель А.Гедеонов Техред С.Мигунова
Заказ 1070/26 Тираж 800Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ПШ Патент, г. Ужгород, ул. Проектная, 4
Корректор И.Муска
| Предохранительное устройство дляТЕлЕСКОпичЕСКОй шТАНги пОд'ЕМНО- ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU819048A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
