Изобретение относится к грузозахватным устройствам и может быть использовано для выполнения перегрузочных операций с грузами, снабженными цапфами.
Цель изобретения - повышение надежности.
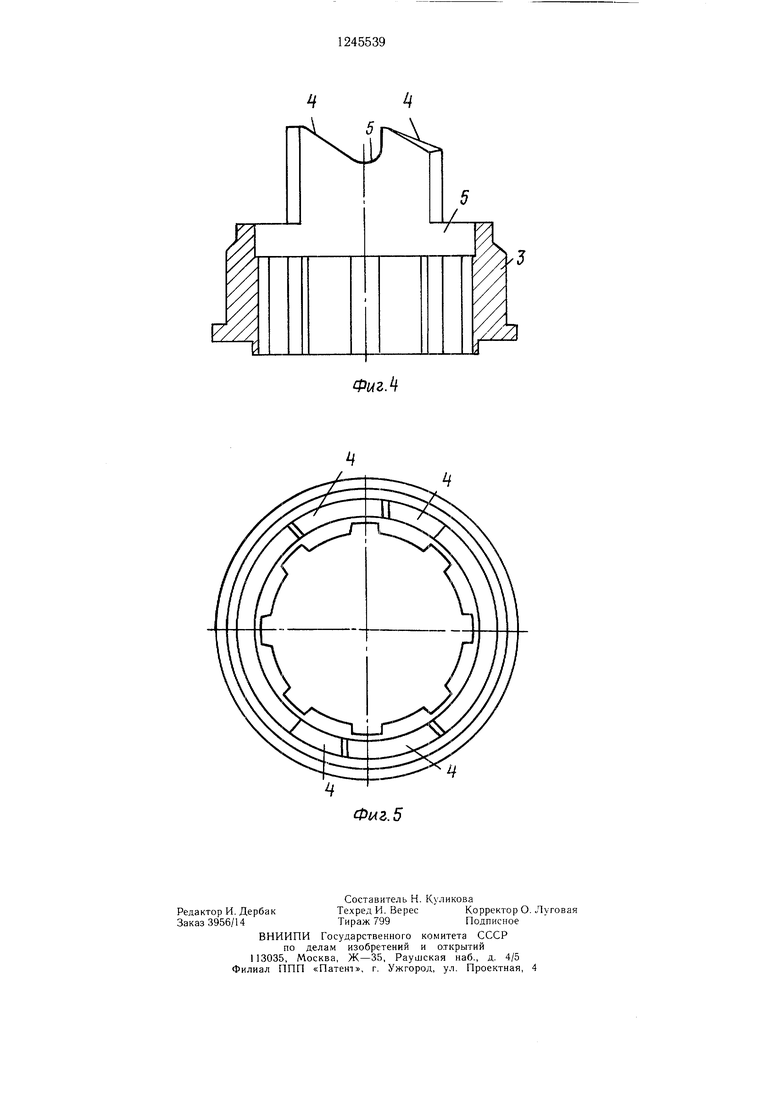
На фиг. 1 схематично изображено захватное устройство для грузов, снабженных цапфами, общий вид при сведенных рычагах (штрих-пунктиром -- при разведенных рычагах); на фиг. 2 - развертка шлицевой втулки по окружности, на которой расположены скосы и выемки; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - шли- цевая втулка, разрез; на фиг. 5 - то же, вид сверху.
Захватное устройство содержит стакан 1, корпус 2, шлицевую втулку 3 со скосами 4 и выемками 5. Все три детали скрепле ны между собой, например, винтом 6. В нижней части корпуса 2 на осях 7 установлены захватные рычаги 8, разводящие- ся пружинами 9. Захватные рычаги 8 в нижней части имеют поверхность захвата, соответствующую новерхности цапф 10 груза. В верхней части захватных рычагов 8, в прорезях, установлены ролики 11 на осях 12.
Механизм управления рычагами включа- ет в себя установленный в корпусе 2 подпружиненный пружиной 13 полый ползун 14, в нижней части которого смонтирован ловитель 15, соединенный с ползуном штифтом 16. Для разведения захватных рычагов 8 в этой части ползуна выполнено окно 17, а для равномерного разведении их относительно общей оси устройства па нижней стенке окна 17 выполнены с двух сторон скосы 18. Верхняя часть ползуна снабжена щлип,ами 19 с односторонними скосагуш 20. В средней части ползуна выпол- неиы бурт 21 и выточка 22. Внутри ползуна 14 размещен ступенчатый цилиндр 23 с упорами 24, выполненными в виде крестовины в верхней части.
Верхняя часть ступенчатого цилиндра 24 установлена в подшипнике 25, который поджат к ступенчатому цилиндру пружиной 26. Взаимодействующие поверхности корпуса 2, ползуна 14 и ступенчатого цилиндра 23 защищены от воздействия внешней среды уп- лотнения лн 27. В верхней части стакана выполнен резьбовой хвостовик 28, который вворачивается в рабочий орган грузоподъемного средства.
Устройство работает следуюпдим образом.
При зацеплении груза исполнителгзный орган грузоподъемного средства совместно с захватным устройством для грузов с разведенными захватными рычагами 8 перемещается до упора ловителем 15 в цапфу 10 груза. Далее стакан 1, корпус 2, шлицевая втулка 3, захватные рычаги 8, ступенчатый цилиндр 23 с крестовиной 24 продолжают перемещаться относительно неподвижного ползуна 14. Перемещение указанных деталей
з
0
5
0
происходит TOvibKO прямолинейно, от поворота вокруг оси предотвращают шлицы 19 на ползуне 14 и шлицы втулки 3. При этом скосы 18 ползуна 14 сводят захватные рычаги 8, которые профилированной поверхностью захватывают цапфу 10, а крестовина 24 ступенчатого цилиндра 23 на своем пути встречает односторонние скосы 20 ползуна 14. После чего крестовина останавливается, а детали 1-3 и 8 продолжают свое движение относительно ползуна 14 и сжимают пружину 26.
Остановка движения деталей 1-3 и 8 происходит после упрра нижнего торца шлицевой втулки 3 в нижний торец выточки 22. При этом скосы 4 щлицевой втулки 3 сопрягаются со скосами 20 ползуна 14, а крестонина 24 под действием боковой силы, возникающей от энергии сжатия пружин 26, начинает перемещаться по сопряженной наклонной поверхности скосов 4 и 20 с пово|)отом в подшипнике 25 вокруг общей оси устройства. Далее происходит автоматическое переключение движения исполнительного органа на обратное направление. Стакан 1, корпус 2 и втулка 3 возвраща- югся в исходное положение. При этом под действием силы пружины 26 крестовина 24 ступенчатого цилиндра 23 входит в выемки 5, а сам цилиндр 23 нижней частью встает между роликами 11, тем самым фиксируя захватные рычаги 8, груз с цапфами И) подготовлен к транспортированию.
Расцепление захватного устройства производится также нажатием захватного устрой- ства, соединенного с исполнительным органом грузоподъемного механизма, в цапфу 10 груза. Стакан 1, корпус 2, шлицевая втулка 3, находящаяся в выемках 5 втулки 3 крестовина 24 ступенчатого цилиндра 23 и захватные рычаги 8 начинают перемещаться относительно ползуна 4, упершегося ловителем 15 в цапфу 10 груза. Перемещение указанных деталей происходит только прямо- . От поворота вокруг оси предотвращают шлицы 19 на ползуне 14 и шлицы втулки 3. При этом нижняя часть ползуна 14 со скосами 18 встает между прямыми участками захватных рычагов 8, а верхняя часть своими скосами 20 останавливает движение крестовины 24 ступенчатого цилиндра 23. Ста1кан , корпус 2, шлицевая втулка 3 и захватные рычаги 8 перемещаются до упора нижним торцом шлицевой втулки 3 в нижний торец выточки 22.
Одновременно скосы 20 сопрягаются со скосами 4, пружина 26 сжимается, а крестовина 24 ступенчатого цилиндра 23 под действием боковой силы, возникающей на наклонной поверхности от энергии сжатия пружины 26, начинает перемещаться по сопряженной поверхности скосов 4 и 20 с по- BopOToivi в подшипнике 25 вокруг общей оси устройства.
В момент упора происходит автоматическое переключение исполнительного органа на обратное направление движения. Стакан 1, корпус 2 и втулка 3 возвращаются в исходное положение, а крестовина 24 ступенчатого цилиндра 23 под действием силы сжатия пружины 26 входит между двумя скосами 4. При дальнейшем движении деталей 1-3 ступенчатый цилиндр 23 выходит из
зацепления с роликами 11, а пружины 9 разводят захватные рычаги 8. Роликами 11 захватные рычаги 8 входят в окно 17 ползуна 14, тем самым обеспечивая свободный выход цапфы 10. Пружина 13 обеспечивает возврат ползуна 14 при зацеплении и расцеплении груза с цапфой 10. Уплотнения 27 предохраняют внутреннюю часть устройства от загрязнения и влаги.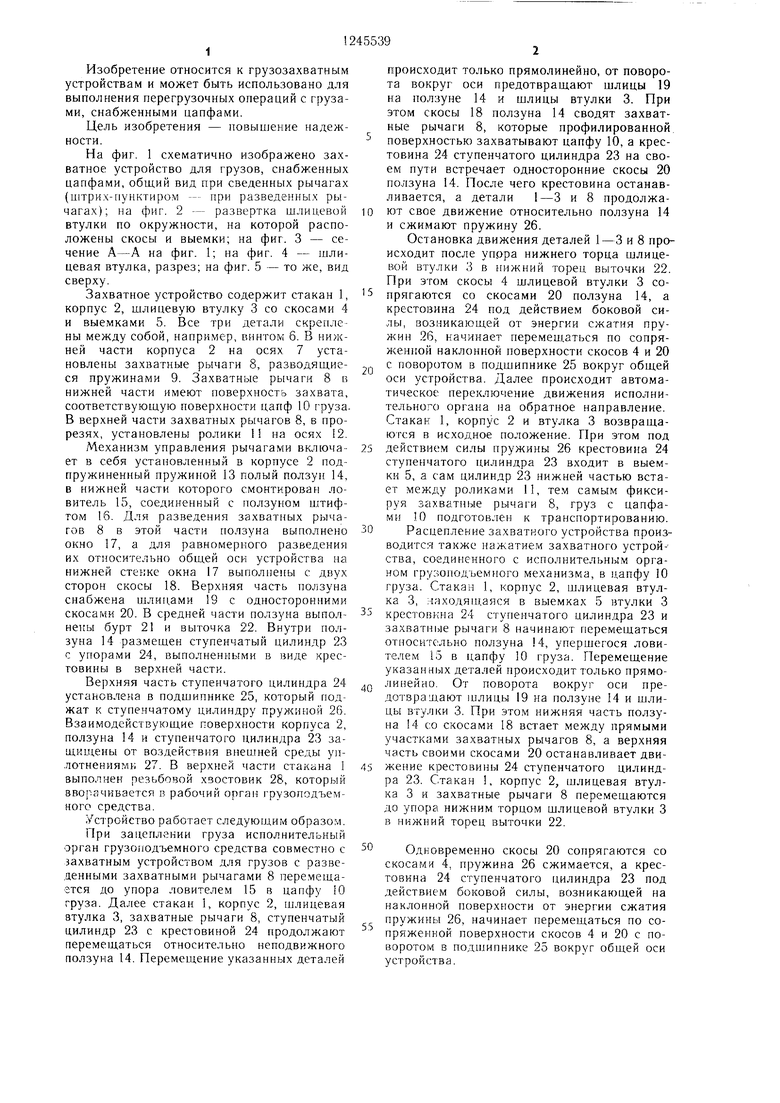

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов,СНАбжЕННыХ цАпфАМи | 1976 |
|
SU844546A1 |
| ДВУХТАКТНЫЙ ДЕТОНАЦИОННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2570947C2 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Устройство для запрессовки втулок | 1984 |
|
SU1183344A1 |
| Захват-кантователь | 1986 |
|
SU1341153A1 |
| ПОВОРОТНАЯ ГОЛОВКА ЗАХВАТНОГО УСТРОЙСТВА ДЛЯ ГРУЗОВ | 1995 |
|
RU2148549C1 |
| МАХОВИЧНЫЙ УДАРНО-ИМПУЛЬСНЫЙ ПРИВОД | 2004 |
|
RU2341699C2 |
| Устройство для комплектования пакета дисковых заготовок с технологическими прокладками | 1977 |
|
SU738821A1 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
| Захватное устройство для грузов с головкой | 1987 |
|
SU1519996A1 |
Фиг. 2
Фиг.З
ФигЛ
Фиг. 5
| Грузозахватные клещи для штучных грузов | 1957 |
|
SU110904A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
