Изобретение относится к техничесКИМ средствам для производства по- грузочно-разгрузочных транспортных и складских работ, а точнее к грузозахватным приспособлениям для погрузчиков .
Цель иэ обретения - расширение функциональн№с возможностей и предотвращение повреждения груза.
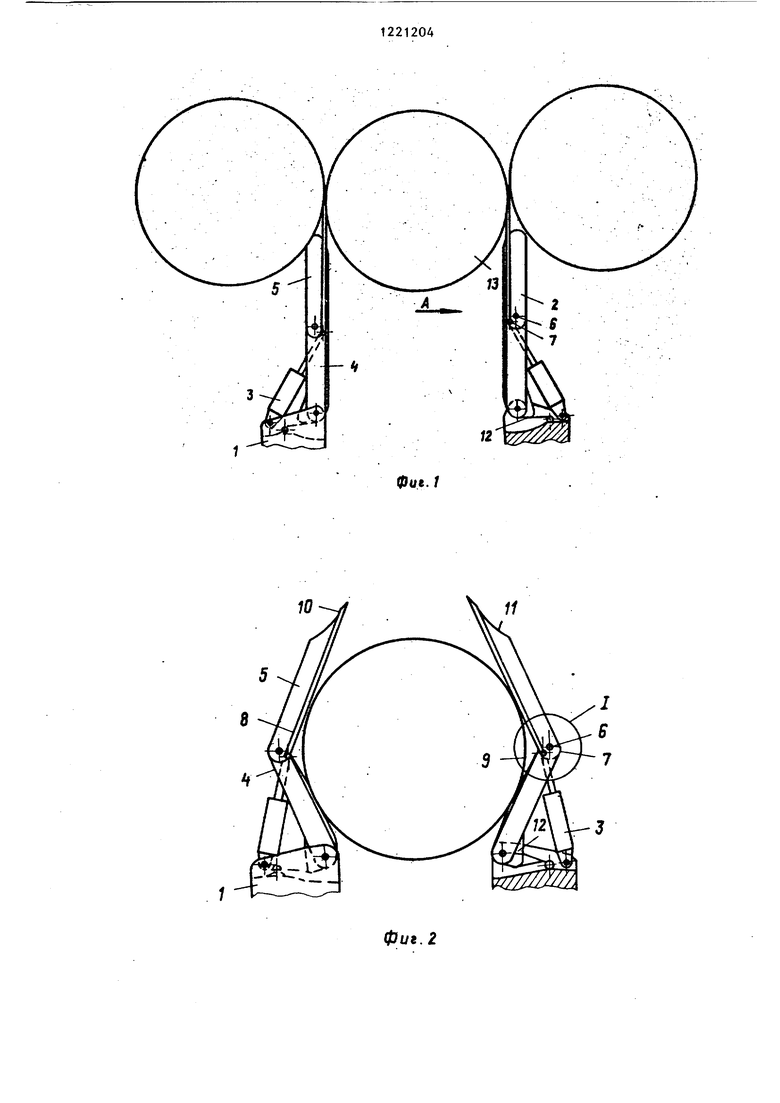
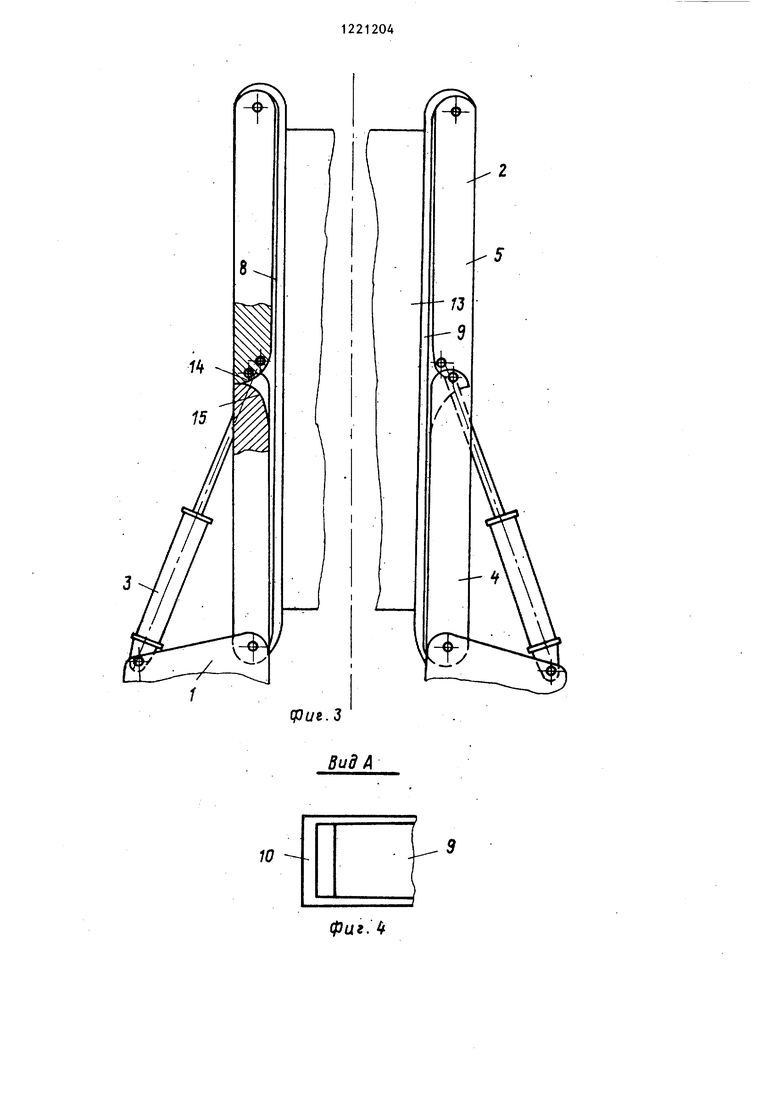
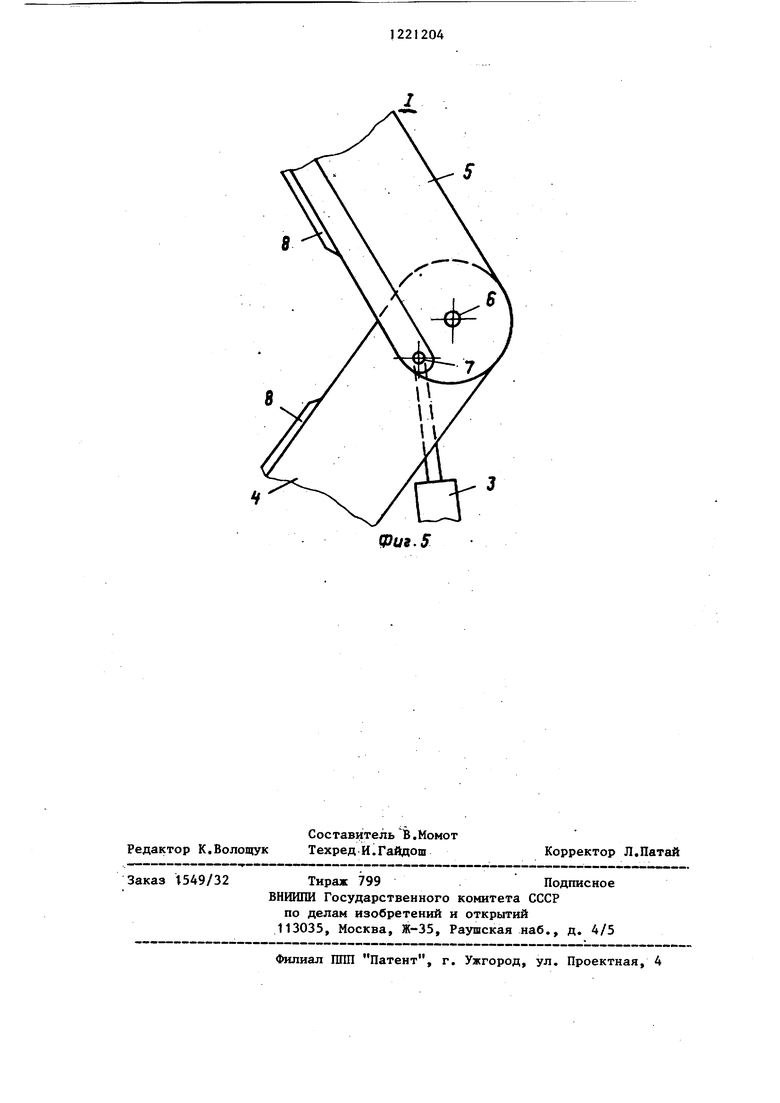
На фиг. 1 изображен универсальный захват в момент извлечения рулона бумаги из плотно сложенного штабеля, на фиг. 2 - то же, при транспортировании рулона на фиг. 3 - то же, при транспортировании груза прямоугольной формы, на фиг. 4 - вид А на фиг. 1} на фиг. 5 - узел I на фиг. .
Универсальный захват для штучных грузов состоит ид корпуса 1, пары шарнирно прикрепленных к нему лап 2 и силовых цилиндров 3 для их поворота Каждая лапа 2 состоит из двух рычагов 4 и 5 одинаковой длины, соединенных общим шарнирся4 б, причем ;дальний от корпуса 1 рычаг 5 также соединен с ним силовым цилиндром 3 в шарнире 7 с эксцентриситетом относительно общего шарнира 6 (фиг. 5). На,.рабочих поверхностях шарнирно соединенных рычагов 5 и-4 жестко при- креплены фрикционные накладки 8, с которыми контактирует гибкий зле- мент 9, выполненный в виде ленты, один, конец которой закреплен на свободном конце рычага 5, имеющем П-образную рамку 10, снабженную с тыльной стороны пластиной постоянной кривизны 11, а второй конец жестко закреплен на корпусе 1, Эксцентрик 12, который может быть выполнен в виде прилива, расположен с тыльной стороны рычага 4 и огибается
гибким элементом 9, Гибкие элементы 9 лап 2 охватывают с двух сторон груз 13. Рычаги 4 и 5 в месте их шарнирного крепления друг с другом снабжены упорами 14 и 15, которые могут быть выполнены в виде лриливов.
Универсальный захват действует следующим образом.
Погрузчик, оборудованный универсальн ьм захватом, подъезжает к грузу ТЗ в виде, например, рулонов бумаги, уложенных в штабель, и начинает вводить между рулонами П-об- . разные рамки 10. Далее посредством
силовых цилиндров 3 начинается
складывание рычагов 4 и 5. Так как дпина рычагов 5 увеличена за счет П-образных рамок 10, то по мере дальнейшего втягивания штоков цилиндров 3 П-образные рамки 10 охватывают груз 13 с его тыльной стороны и далее, свободно скользя по ней, перемещают рулон внутрь захвата. Одновременно по мере отклонения
рычагов 4 эксцентрики 12, воздействуя на гибкий элемент 9, выбирают излишек его, который образуется при складывании рычагов 4 и 5.
После сближения лап 2 груз плотно
охватывается гибким элементом 10, опираюпцшся на фрикционные накладки 9, и транспортируется.
Расширение сферы применения захвата происходит за счет возможности работать без переналадки с грузами различной геометрической формы. Предотвращение повреждения грузов достигается благодаря тому, что гибкий элемент, постоянно оставаясь
натянутым, позволяет в точности копи- ровать кривизну поверхности грузов, восприимчивых к механическим деформациям.
(Pue. /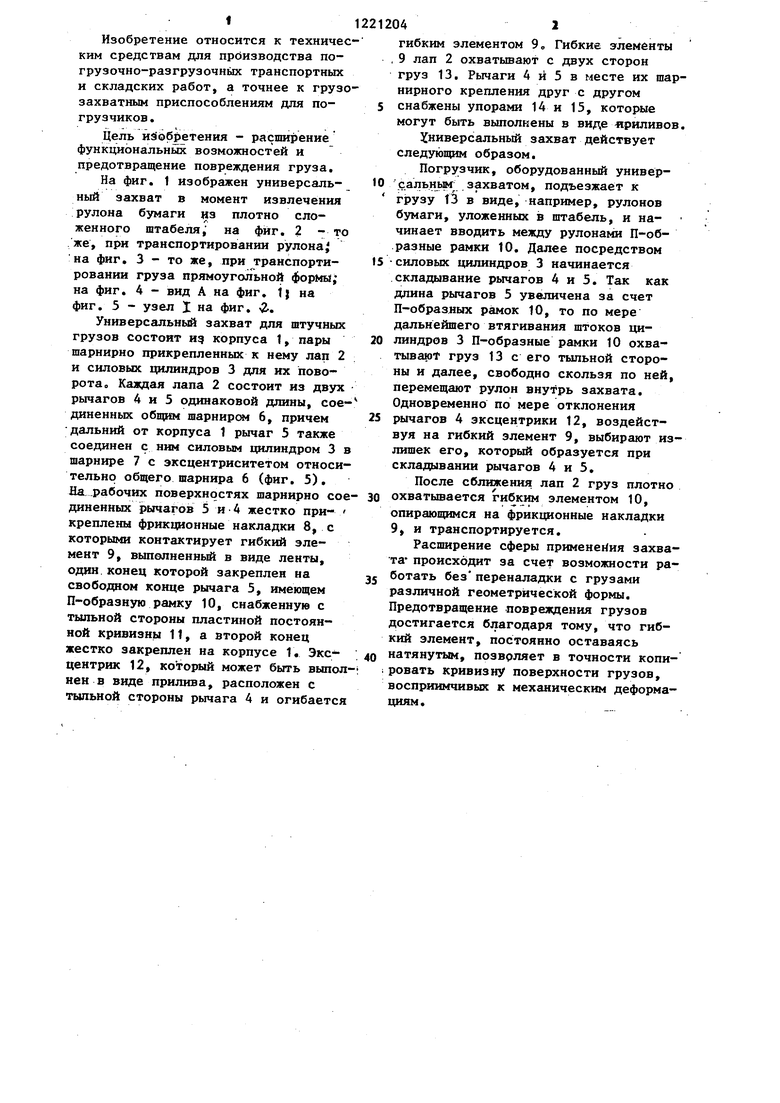
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство к погрузчику | 1978 |
|
SU749798A1 |
| Поддон | 1986 |
|
SU1381035A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захват погрузчика | 1987 |
|
SU1521713A1 |
| Устройство для упаковки в бумагу цилиндрических рулончиков медицинской ваты | 1955 |
|
SU103537A1 |
| СМЕННЫЙ ЗАХВАТ К УНИВЕРСАЛЬНОМУ ПОГРУЗЧИКУ ДЛЯ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 1965 |
|
SU171109A1 |
| УСОВЕРШЕНСТВОВАННЫЙ ПОГРУЗЧИК ПОДДОНОВ | 1996 |
|
RU2160203C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2217899C2 |
| Орган для захвата пакетов грузов к погрузчику | 1986 |
|
SU1409584A1 |
| Складной поддон | 1987 |
|
SU1495232A1 |
10
11
фиг. 2
Сриг. 3 Вид А
фиг.
Фиг. 5
| Погрузочно-разгрузочные машины и складское оборудование промышленных предприятий./Под ред | |||
| Я.Л.Немец | |||
| М.: Машиностроение, 1970, Со 157, рис, 82. |
