1
Изобретение относится к станкостроению и может быть использовано во фрезерных станках с поворотной головкой.
Цель изобретения расширение технологических возможностей и упрощение конструкции.
Цель достигается за счет того, что увеличивается диапазон поворота фрезерных головок и исключается воздействие на головку дополнительной силы, равной весу электро- и гидро- ком 1уникаций.
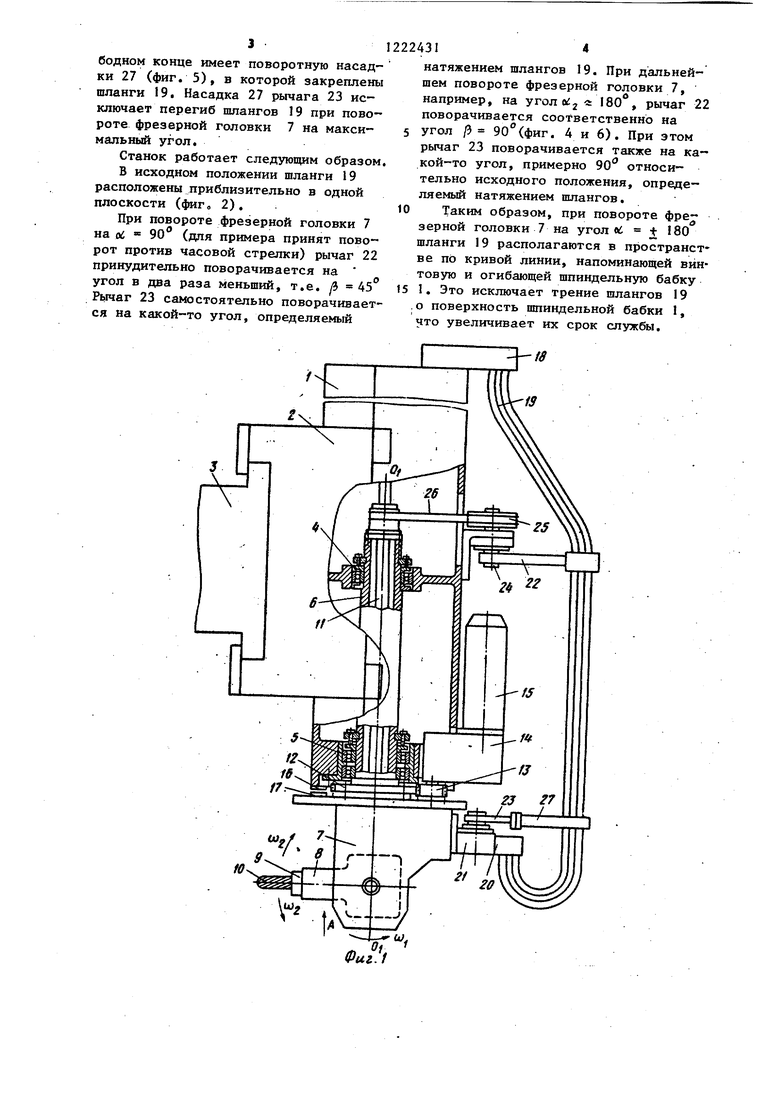
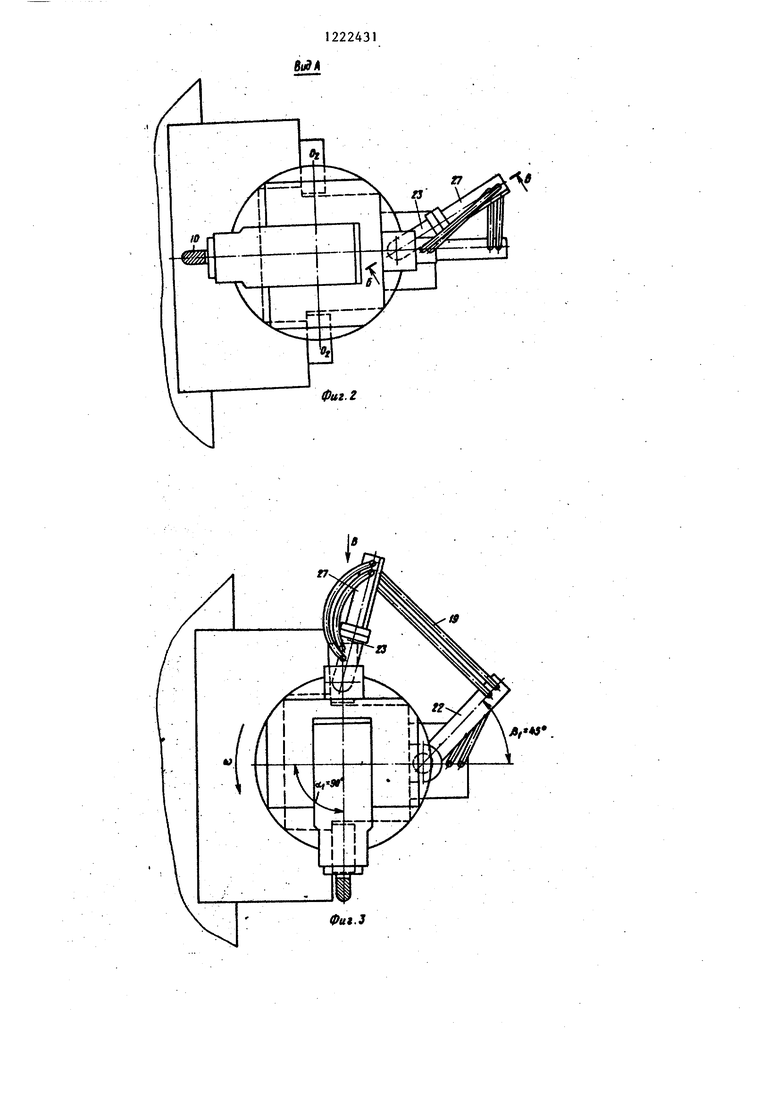
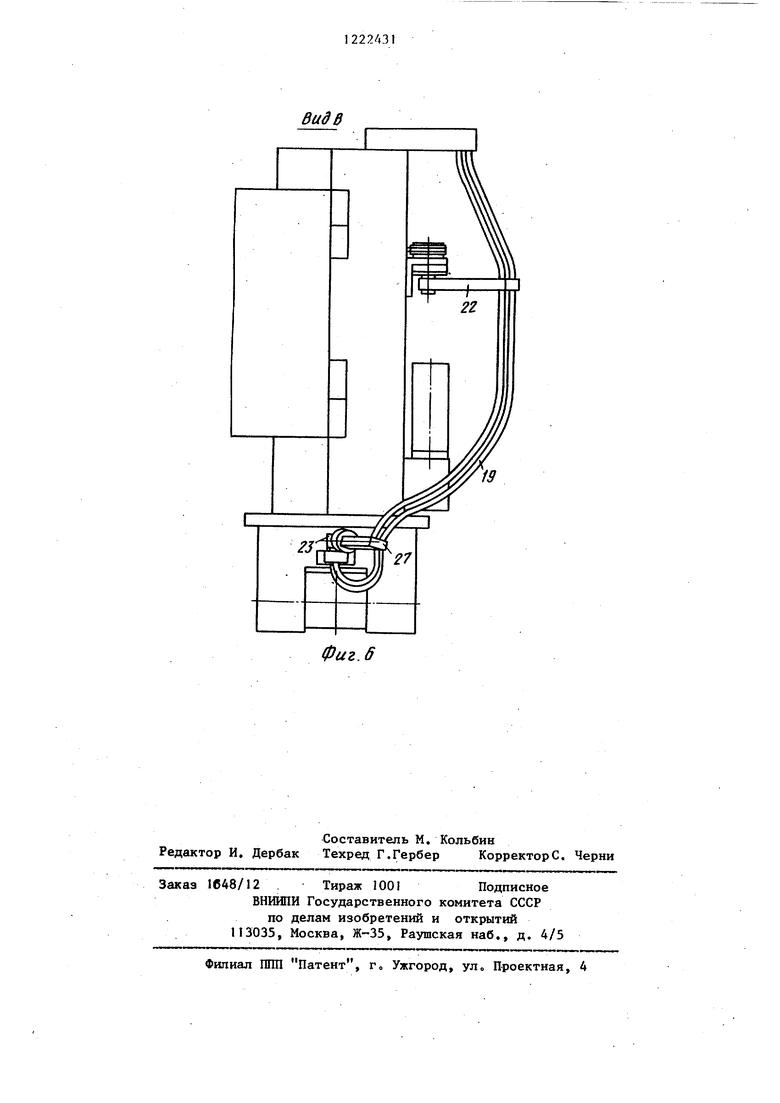
На фиг. изображена шпиндельная бабка металлорежущего станка, осна- цег-ного устройством для подвода гибких электро- и гидрокоммуникаций; н фиг, 2 - вид А не фиг. 1; на фиг, 3 - то же, головка повернута на 90 пр тив часовой стрелки; на фиг. 4 - то же, головка повернута на 180 против часовой стрелки; на фиг. 5 - разрез Б-Б на фиг. 2; на фиг. 6 - вид В на фнг. 3.
Металлорежущий станок содержит шпиндельную бабку 1, установленную в поперечине 2 с возможностью вертикального перемещения. Поперечина 2 смонтирована на траверсе 3 с возможностью горизонтального перемещения (фиг. 1).
В шпиндельной бабке 1 на подшипниках 4 и 5 установлен полый вертикальный вал 6, к нижнему торцу которого прикреплена свою4 корпусом фрезерная поворотная головка 7. Полый вал 6 приводит во вращение головку 7 вокруг вертикальной оси 00, на угол + 180 . В поворотной головке 7 установлен поворотный вертлюг 8, в котором смонтирован рабочий вращающийся шпиндель 9 с фрезой 10. По- воротп)|й вертлюг 8 может вращаться вокруг горизоитальной оси 0 0 на угол 4; ПО. Внутри верхней части шпиндельной бабки I установлены электродвигатель, коробка скоростей выходной вал 11 которой смонтирован внутри полого вала 6. Выходной вал 11 соединен со шпинделем 9 кинематической цепью (не показана), допускающей поворот вертлюга. Возможна также конструкция фрезерной головки , высокоскоростной с одной скоростью вращения, в которой электродвигатель главного движения устанавливается на вертлюге 8, а шпиндель 9 непосредственно соединен с его валом.
10
15
20
25
224312
Вращение полого поворотного вала .
6 осуществляется через зубчатую передачу 12 и 13 от редуктора 14 и электродвигателя 15.
На подошве корпуса фрезерной головки 7 и нижней торцовой плоскости . шпиндельной бабки установлены круговые индукционные датчики 16 и 17, взаимодействующие между собой.
Для отсчета угла поворота вертлюга 8 относительно корпуса фрезерной головки 7 меняются также соответствующие круговые датчики (не показаны) . На заднем торце шпиндельной бабки 1 закреплена раздаточная коробка 18, к которой закреплены штан- ги 19 электро- и гидрокоммуникаций, в которых расположены электропровода для подачи электрической энергии к двигателю, установленному на вертлюге 8, и для связи индукционных датчиков 16 и 17 с системой программного управления станка, а также шланги 19 для подачи смазки и СОЖ, число шлангов может быть различные. Другой конец шлангов закреплен в приемной коробке 20, прикрепленной к кронштейну 21, установленному в корпусе фрезерной головки 7.
Средние части пшангов 19 закреплены в устройстве для направления коммуникации, исключающем их захлестывание за иаружную поверхность шпиндельной бабки 1 и преждевременный выход из строя.
Устройство для направления выполнено в виде двух рычагов, к свободным концам которых прикреплены шланги 19 рычага 22, установленного на шпиндельной бабке 1, и рычага 23, установленного в кронштейне 21, прикрепленного к корпусу фрезерной головки 7. Оси вращения рычагов 22 и 23 расположены параллельно оси вращения фрезерной головки 7, т.е„ оси вала 6. На валу 24 рычага 22 закреплен блок 25.. На задний конец полого вала 6 и на блок 25 намотано несколько рядов тросика 26, концы которого закреплены (прижаты) винтами к наружной поверхности блока 25. Диаметр последнего выполнен в два раза большим, чем диаметр заднего конца полого вала 6. Тросик 26, намотанный на задний конец полого вала 6, и блок 25ff
образуют кинематическую передачу с понижающей редукцией, имеющей передаточное отношение 0,5. Рычаг 22 выполнен цельным. Рычаг 23 на сво30
35
40
45
50
бедном конце имеет поворотную насадки 27 (фиг. 5), в которой закреплены шланги 19. Насадка 27 рычага 23 исключает перегиб шлангов 19 при повороте фрезерной головки 7 на максимальный угол.
Станок работает следующим образом.
В исходном положении шланги 19 расположены приблизительно в одной плоскости (фиго 2).
При повороте фрезерной головки 7 на oL 90 (для примера принят поворот против часовой стрелки) рычаг 22 принудительно поворачивается на угол в два раза меньший, т.е. /3 45 Рьгааг 23 самостоятельно поворачивается на какой-то угол, определяемый
натяжением шлангов 19. При дальнейшем повороте фрезерной головки 7, например, на угол (2 80 РЫчаг 22 поворачивается соответственно на
угол Р 90°(фиг. 4 и 6). При этом рычаг 23 поворачивается также на какой-то угол, примерно 90 относительно исходного положения, определяемый натяжением шлангов.
Таким образом, при повороте фрезерной головки 7 на угол «i t 180 шланги 19 располагаются в пространстве пО кривой линии, напоминающей винтовую и огибающей шпиндельную бабку
1. Это исключает трение шлангов 19 0 поверхность шпиндельной бабки 1, что увеличивает их срок службы.
-ш
18
Фиг. г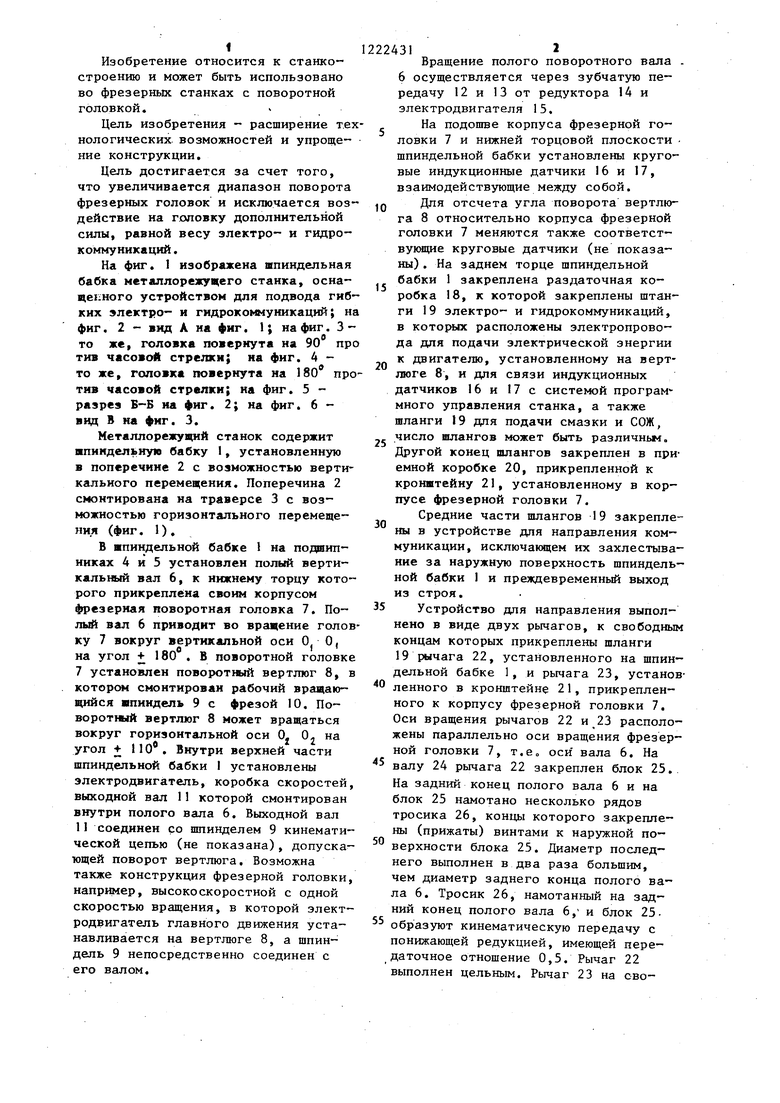
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельная бабка многоцелевого станка | 1987 |
|
SU1509196A1 |
| Шпиндельная бабка фрезерного станка | 1991 |
|
SU1808511A1 |
| КОПИРОВАЛЬНО-ФРЕЗЕРНЬ^Й СТАНОК | 1968 |
|
SU217893A1 |
| Токарный многорезцовый полуавтомат | 1982 |
|
SU1119780A1 |
| Станок для пятикоординатной обработки вращающимся инструментом пространственно-сложных криволинейных поверхностей | 1972 |
|
SU491252A1 |
| МНОГОШПИНДЕЛЬНЫЙ ПОЛУАВТОМАТ | 1966 |
|
SU222843A1 |
| Станок для одновременной обработки двух канавок и двух спинок спирального сверла | 1977 |
|
SU614904A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТОКАРНЫЙ СТАНОК | 1996 |
|
RU2103114C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ РЕЗАНИЕМ ПАЗОВ В ОТВЕРСТИИ ДЕТАЛИ | 1992 |
|
RU2088385C1 |
| Продольно-строгально-фрезерный станок | 1991 |
|
SU1797526A3 |
Фиг.ft
27
Фиг. 5
В ид В
Фиг.6
| Каталог на станок REH фирмы Шисс-ФРОРИП | |||
| ФРГ, 1984 |
