2. Захватное устройство содержащее корпус и приводные губки, выполненные из эластичного материала, отличающее ся тем, что, с цепью упрощения конструкции при сох- раиении надежности эахватьшания деталей различной формы и твердости, каждая губка выполнена в виде пакета
Изобретение относится к машиностроению, а именно к захватным уст- ; ройствам промышленных роботов и манипуляторов для надежного и быстрого закрепления объектов различной формь 5 и массы, выполненных из различных материалов.
Цель изобретения - упрощение конструкции при сохранении надежности захватьюания деталей различной формы ю и твердости, особенно хрупких.
На фиг.1 изображено захватное устройство с эластичными губками с отверстиями; на фиг. 2 - то же, с губками, выполненными в виде пакета 5 шгастин.
Захватное устройство состоит из корпуса 1, эластичных губок 2, выполненных из губчатой резины (размер 50 X 100 X 150), закрепленных на при- 20 водной части -3 (привод не показан).
Дпя манипулирования корковыми мо - делями с формой, близкой к цилиндрической (литейное производство), ве- сом кг в губках 2 выполнено 25 три ряда отверстий. Диаметр отверстий равен 6 мм, шаг S между отверстиями и между рядами - 12 мм. Оси отверстий перпендикулярны направлению перемещения губок, что способст- JQ вует максимальному использованию эластичности, полученной сверлением отверстий.
L -« . , .
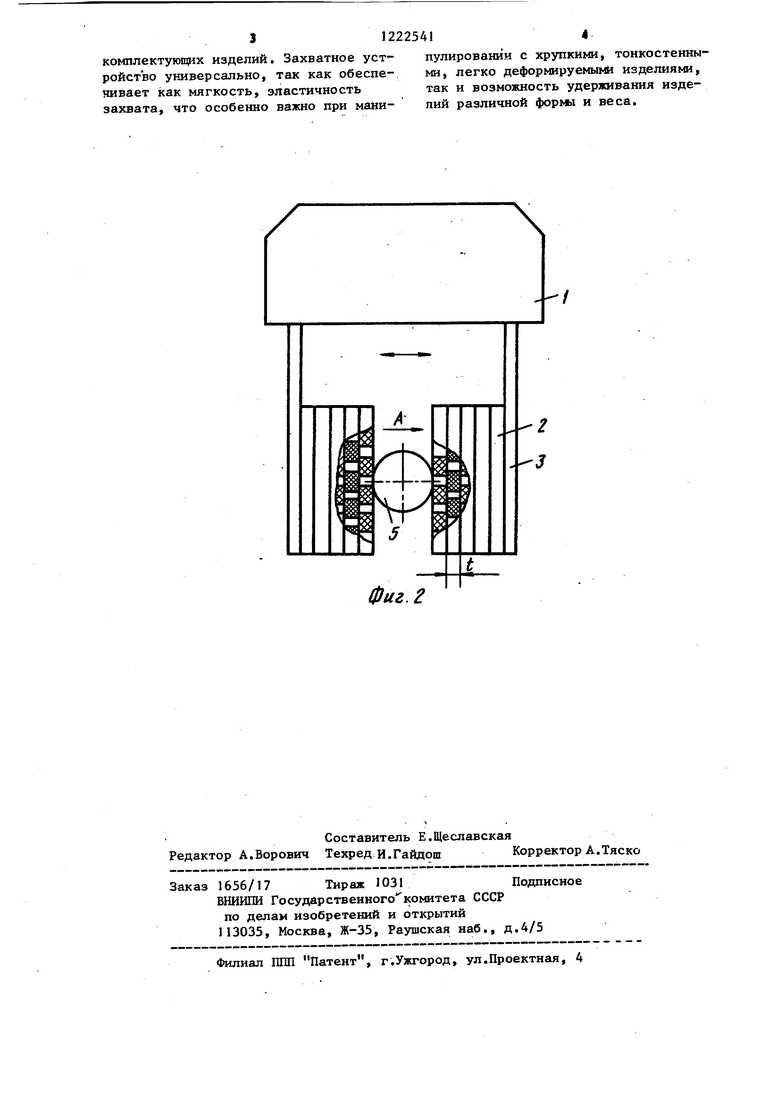
Губки также могут быть выполнены в виде пакета эластичных пластин 4 35 с отверстиями (фиг.2), изготовленных из губчатой резины и склеенных между собой клеем 88. Для манипулирования, например, корковыми моделями двойной кривизны массой до 15 кг необходимый размер пластины составляет
пластин, в которых вьшолнены отверстия со смещением относительно отверстий соседней пластины на-половину расстояния между отверстиями, причем оси отверстий параллельны направлению перемещения губок, а диаметры отверстия и расстояния между ними связаны зависимостью 852Ь,
50 X 100 X 150, толщина t 10 мм с размером Перфорации: диаметр И 6 мм, шаг S 12 мм.
Устройство работает следующим образом.
Привод, расположенный в корпусе 1 сближает приводные губки 2 и обхватывает , корковую модель. Наличие перфорации позволяет увеличить площадь пятна контакта губок 2 с деталью 5 без увели чения усилий зажима. Регулировать эластичность губок можно изменением диаметров отверстий и изменением расстояний между отверстиями (шагом S), а также количеством и толщиной t пластин в губках.
Экспериментально доказано, чтсг для корковых моделей массой до 25 кг в губках, выполненных из губчатой резины, диаметр отверстий должен находиться в пределах 5-8 мм, S iSb.
Дпя деталей значительного веса (более .10 кг) и повышенной хрупкости (детали из стекла, фарфора, тонкостенные корковые модели) b 8 - - 10 мм, S 2Ь, t 10 мм. Губка состоит из пяти пластин. Для деталей двойной кривизны и повышенной хрупкости следует пользоваться губками, вьшолненными в виде пакета пластин. Дпя более жестких деталей из конструкторских и технологических соображений следует пользоваться губками, выполненными из одной пластины.
Предлагаемое захватное устройство характеризует простота конструкции, что обусловливает снижение затрат на проектирование и изготовление, а также экономию материалов, и
312225414
комплектующих изделий. Захватное уст- пулировании с хрупкими, тоикостенны- ройство универсально, так как обеспе- ми, легко деформируемыми изделиями, кивает как мягкость, эластичность так и возможность удерживания изде- захвата, что особенно важно при мани- пий различной формл и веса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1986 |
|
SU1445949A1 |
| Захватное устройство | 1987 |
|
SU1426784A1 |
| КОМПЕНСИРУЮЩАЯ МУФТА ПРИВОДА | 2007 |
|
RU2347121C1 |
| Устройство для вытяжки листов термопласта | 1989 |
|
SU1609700A1 |
| Захват манипулятора | 1982 |
|
SU1047680A2 |
| Способ закрепления образцов при испытании на прочность | 1985 |
|
SU1288540A1 |
| Схват манипулятора | 1979 |
|
SU850374A2 |
| Устройство для вытяжки листов термопласта | 1988 |
|
SU1548070A1 |
| Схват промышленного робота | 1975 |
|
SU533478A1 |
| ДАТЧИК ДЛЯ ЗАМЕРА ПОПЕРЕЧНЫХ ПЕРЕМЕЩЕНИЙ ПРИ РАСТЯЖЕНИИ ОБРАЗЦОВ ИЗ ТКАНЕПОДОБНЫХ МАТЕРИАЛОВ | 2024 |
|
RU2823792C1 |
1.Захватное устройство, содержащее корпус и приводные губ1ш, выполненные из эластичного материала, отличающееся тем, что, с целью упрощения конструкции при сохранении надежности захватывания деталей различной фор14 1 и твердости, каждая губка вьюолнена в виде пластины с отверстиями, оси которых перпендикулярны направлению перемещения губок, а. диаметры отверстия и расстояния между ними связаны зависимостью- S 2Ь. 1чЭ ЬЭ to СП , 2 3
-/
фиг. 2
| Исполнительный орган манипулятора | 1974 |
|
SU498156A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
