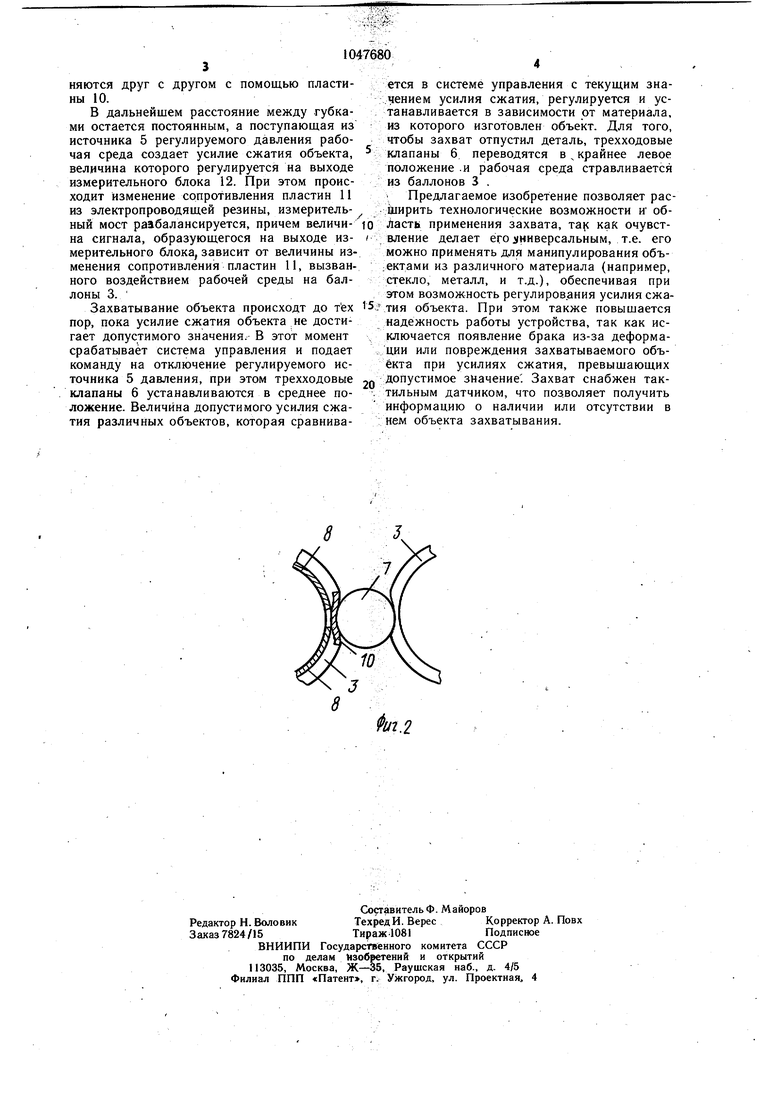
Изобретение относится к робототехнике, в частности к захватным устройствам, и может быть использовано для оснащения манипуляторов с автоматическим, а также с дистанционным управлением. По основному авт. св. № 766857 известен захват манипулятора, содержащий опору, к которой крепятся пальцы-стойки с губками, выполненными из нескольких баллонов, размещенных один над другим, надуваемых сжатым воздухом, поступаемым по шлангам через отверстия в стойках, причем оболочки выполняются из прочного материала, допускающего большие упругие деформации. На шлангах, по которым сжатый воздух подается в каждую оболочку губок независимо от подачи его в остальные оболочки, установлены трехходовые клапаны 1 Недостатком данного захвата является отсутствие средств очувствления, подающих в систему управления сигнальГ, соответствующие информации о наличии детали и измерении усилия сжатия объекта, что в значительной степени снижает надежность его работы, сужает технологические возможности и область применения. Цель изобретения - расширение техно логических возможностей и повышение надежности устройства. Поставленная цель достигается тем, что захват снабжен системой управления, блоком измерения и установленными на одной из губок тактильным датчиком и датчиком усилия сжатия, при этом тактильный датчик выполнен в виде трех пластин из электропроводящей резины, закрепленных на внутренней поверхности внешнего баллона таким образом, что две пластины расположены последовательно с интервалом и подключены к системе управления, третья расположена напротив интервала с возможноетью его перекрытия, а датчик усилия сжатия выполнен в виде установленных на одном из баллонов пластин из электропроводящей резины, концы которых подключены к измерительному блоку. На фиг. 1 изображен захват манипулятора, общий вид; на фиг. 2 - момент срабатывания тактильного датчика при захватывании объекта. Захват манипулятора содержит опору 1, к которой крепятся пальцы-стойки 2 с губками, выполненными в виде нескольких размещенных друг над другом баллонов 3, связанных через отверстия 4 в пальцах 2с источником 5 регулируемого давления с помощью трехходовых клапанов 6, установленных на соединительных магистралях. Кро ме того, на внутренней поверхности внешнего, непосредственно соприкасающегося собъ ,ектом 7 захватывания баллона 3, размещенного на одном из пальцев 2, установлен тактильный датчик, выполненный в виде закрепленных (клееных) на этой поверхности упругих растягивающихся пластин из электропроводящей резины, таким образом, что две из них 8, связанные с системой 9 управления, расположены напротив третьей 10. На внутренней поверхности предпоследнего баллона 3 установлен датчик усилия сжатия, выполненный в виде закрепленных пластин 11 из электропроводящей резины, концы которых связаны с измерительным блоком 12 системы 9 управления. Пластины 8, 10 и 11 обладают свойством изменения собственного сопротивления при растяжении под воздействием внешних сил. В исходном и рабочемсостоянии во внешних баллонах 3, непосредственно соприкасающихся с объектом захватывания 7, находится рабочая среда под минимальным давлением, величина которого определяется требованиями отсутствия контакта электропроводяш их пластин 8 с электропроводящей пластиной 10 при подаче рабочей среды под Давлением в f стальные баллоны 3 в случае отсутствияобъекта 7 захватывания в зоне действия захвата, т.е. .между пальцами 2. Захват манипулятора работает следующим образом. При поступлении рабочей среды через трехходовые клапаны 6 от регулируемого источника 5 давления в баллоны 3 последние раздуваются и растягивают электропроводящие пластины 11, размещенные навнутренней поверхности предпоследнего баллона 3. При этом изменяется сопротивление каждой из пластин 11, подключенных к измерительному блоку 12, в котором происходит постоянная подстройка, чтобы на выходе измерительного блока поддерживался сигнал нулевого уровня. Так, например при использовании измерительного моста в качестве чувствительного элемента измерительного блока 12, в противоположные плечи которого включены пластины 11 и переменное сопротивление, связанное с приводом, управляемым через усилитель сигналом с измерительного моста при появлении разбаланса моста привод подстраивает переменное сопротивление для его уравновешивания. Электропроводящие пластины 8 и 10 тактильного датчика при соприкосновении губок с объектом 7 захватывания соприкасаются,замыкается цепь для прохождения электрического сигн-ала, при этом система 9 управления подает команду на измерительный блок 12. В измерительном блоке 12 прекращается подстройка сопротивления, включенного в плечо моста, противоположное плечу, к которому подключены концы электропроводящих пластин 11. Таким образом, величина сопротивления остается постоянной и равной величине сопротивления пластин 11 из электропроводящей резины в момент осуществления контакта захвата очувствленного манипулятора с объектом 7, т.е. в тот момент, когда пластины 8 соединяются друг с другом с помощью пластины 10. В дальнейшем расстояние между губками остается постоянным, а поступающая из источника 5 регулируемого давления рабочая среда создает усилие сжатия объекта, величина которого регулируется на выходе измерительного блока 12. При этом происходит изменение сопротивления пластин 11 из электропроводящей резины, измерительный мост раабалансируется, причем величи- ю на сигнала, образующегося на выходе из- / мерительного блока, зависит от величины изменения сопротивления пластин 11, вызванного воздействием рабочей среды на баллоны 3. Захватывание объекта происходт до тех 15 пор, пока усилие сжатия объекта не достигает допустимого значения. В этот момент . срабатываёт система управления и подает команду на отключение регулируемого источника 5 давления, при этом трехходовые j клапаны б устанавливаются в среднее положение. Величина допустимого усилия сжатия различных объектов, которая сравнивается в системе управления с текущим зна.чением усилия сжатия, регулируется и устанавливается в зависимости от материала, из которого изготовлен объект. Для того, чтобы захват отпустил деталь, трехходовые клапаны 6. переводятся в крайнее левое положение .и рабочая среда стравливается из баллонов 3 . Предлагаемое изобретение позволяет расширить технологические возможности и обЛасть применения захвата, та как очувствление делает его универсальным, т.е. его можно применять для манипулирования объ.ектами из различного материала (например, стекло, металл, и т.д.), обеспечивая при этом возможность регулирования усилия ежатия объекта. При этом также повышается надежность работы устройства, так как исключается появление брака из-за деформации или повреждения захватываемого объёкта при усилиях сжатия, превышающих допустимое значение. Захват снабжен тактильным датчиком, что позволяет получить информацию о наличии или отсутствии в нем объекта захватывания.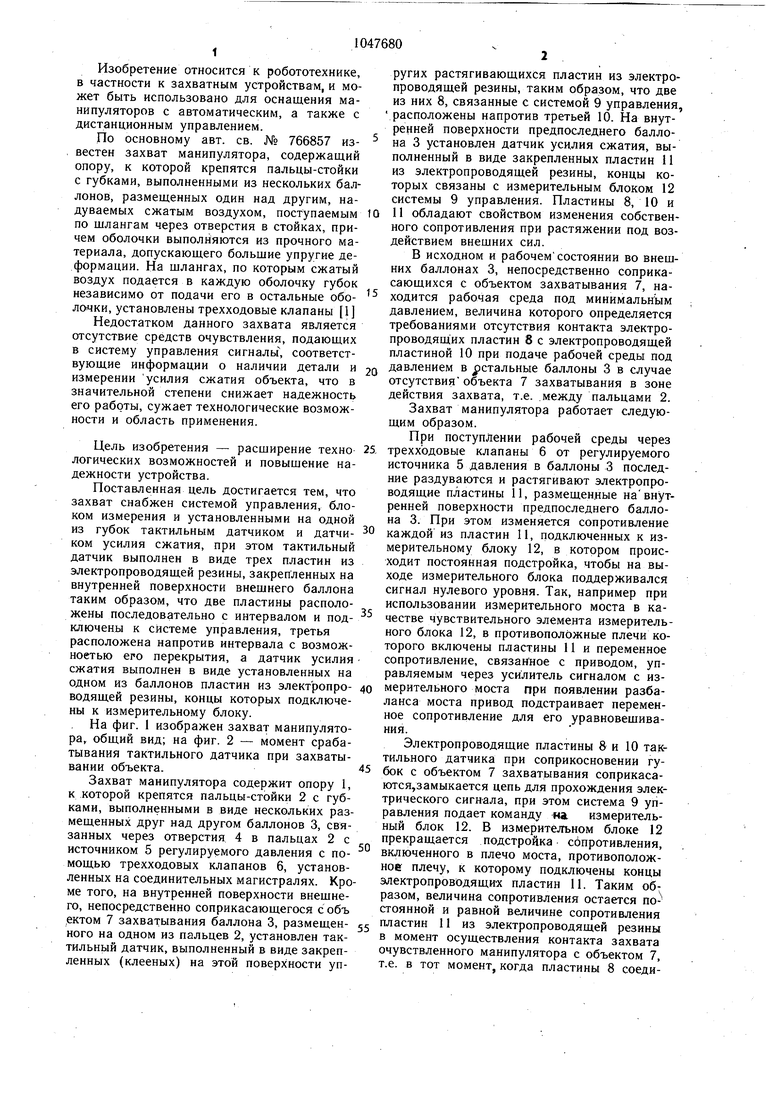
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Захват манипулятора | 1978 |
|
SU766857A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Манипулятор | 1978 |
|
SU766854A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Очувствленный захват манипулятора | 1981 |
|
SU986775A1 |
| Захват очуствленного манипулятора | 1978 |
|
SU709357A1 |
| Очувствленный схват робота | 1985 |
|
SU1373565A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
ЗАХВАТ МАНИПУЛЯТОРА, по авт. св. № 766857, отличающийся тем, что, с целью расширения технологических возЬюжностей и повышения надежности, он снабжен системой упрайления, блоком измерения и установленными на одной из губок тактильным датчиком и датчиком усилия сжатия, при этом тактильный датчик выполнен в виде трех пластин из электропроводяшей резины, закрепленнь1х на внутренней поверхности внешнего баллона таким образом, что две пластины расположены последовательно с интервалом и подключены к системе управления, третья расположена напротив интервала с возможностью его перекрытия, а датчик усилия сжатия выполнен в виде установленных на одном из баллонов пластин из электропроводяшей резины, -причем концы этих пластин подключены к измерительному блоку. i (Л 4 О5 оо
д
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР | |||
| Захват манипулятора | 1978 |
|
SU766857A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
