1
2о Автомат по п,1, о т л и ч а ю- U1, и и с я тем, что механизм подачи заготовки вьшолнен в виде четьфех- профильного плоского кулачка, расположенного соосно вращающемуся нолсу, двух подпружиненных один относи гель- но другого двуплечик пространствеш- ных рычагов, установленных с возможностью взаимодействия между собой одними плечами, гибкой тяги, один конед которой подпружинен,, Г-образ ной кулисы, а также приводного с храповым колесом и подпружиненного прижимного роликов, при этом на свободном конде одного из пространственных рычагов закреплен с возможностью взаимодействия с четырехпро- фильным плоским кулачком бочкообраз,- ный ролик, свободный конец второго рычага выполнен в виде вилки, в rlpo- ушинах которой подвижно установлен подпружиненный конец гибкой тяги., соединенной свободным кондом с Г-об- разной кулисой, в которой на оси за1
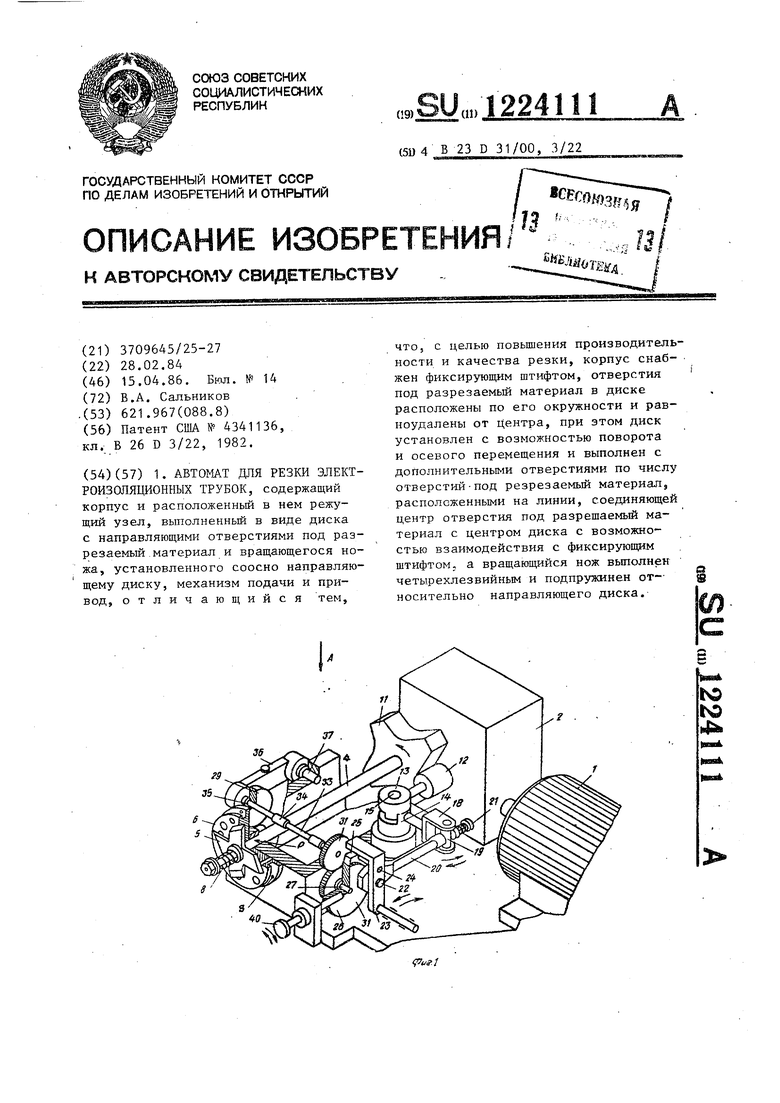
Изобретение относится к устройствам для обработки неметаллических материалов, в частности к оборудованию для резки электроизоляционных трубок из резины, пластика и т.п. диаметром от 0,8 до 7,0 мм.
Цель изобретения - повышение производительности, и качества резки.
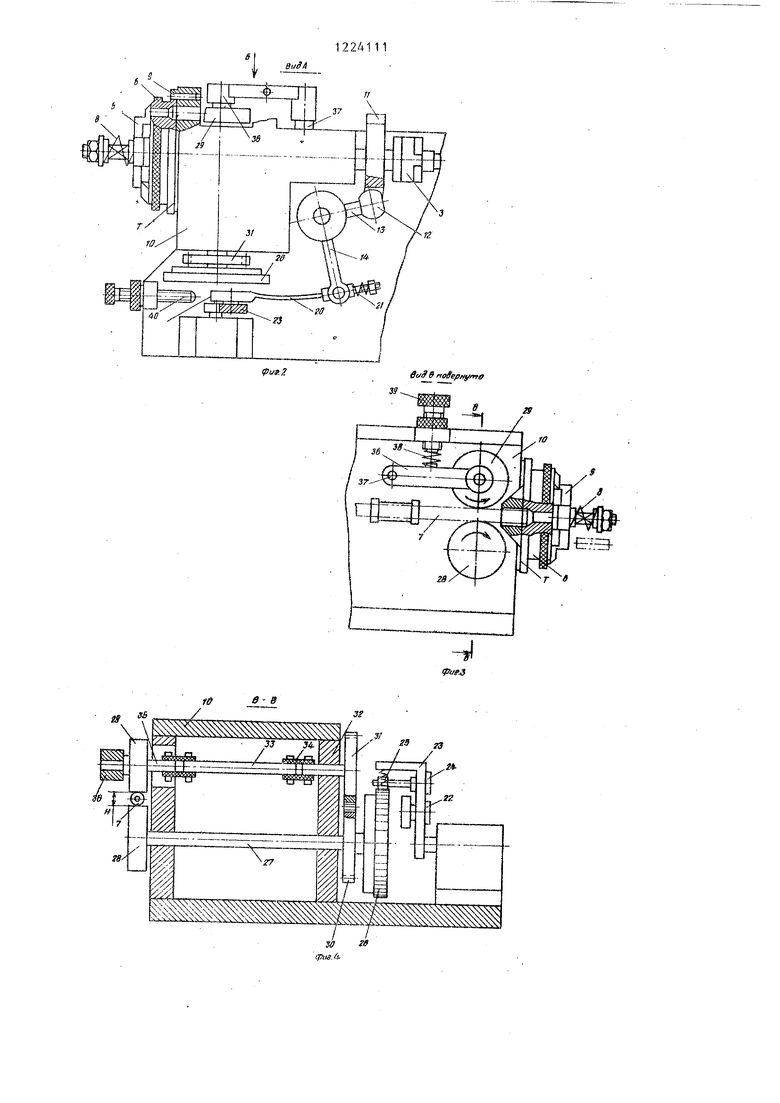
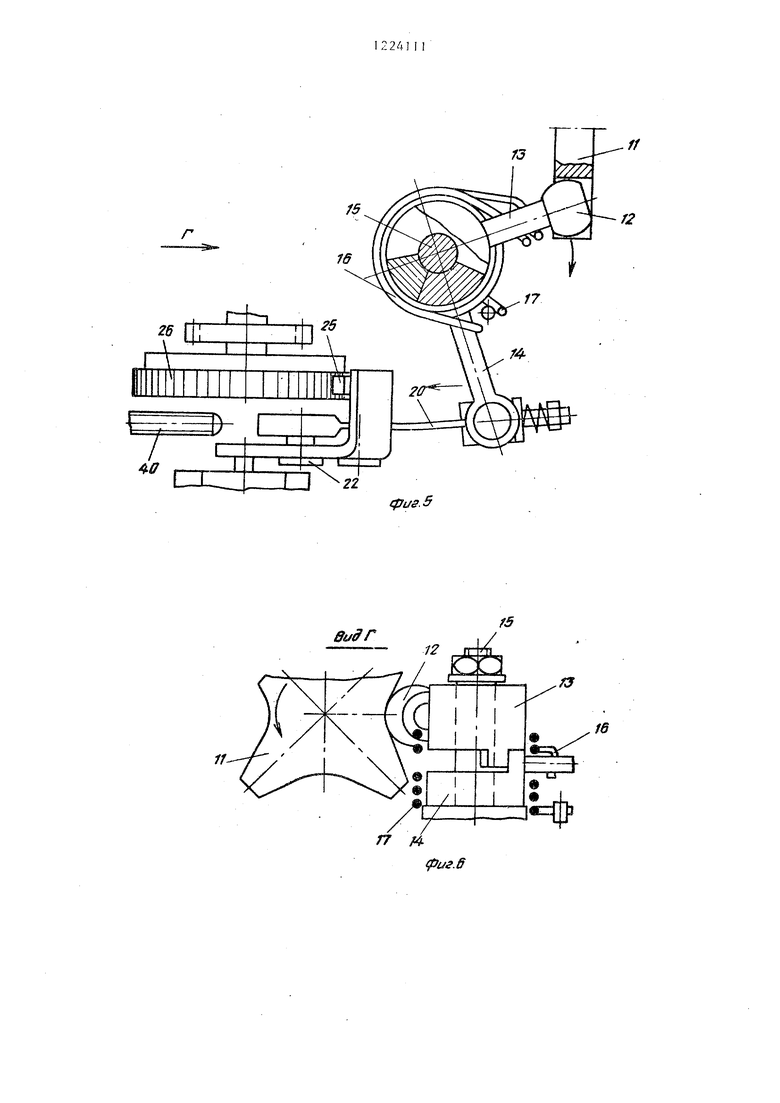
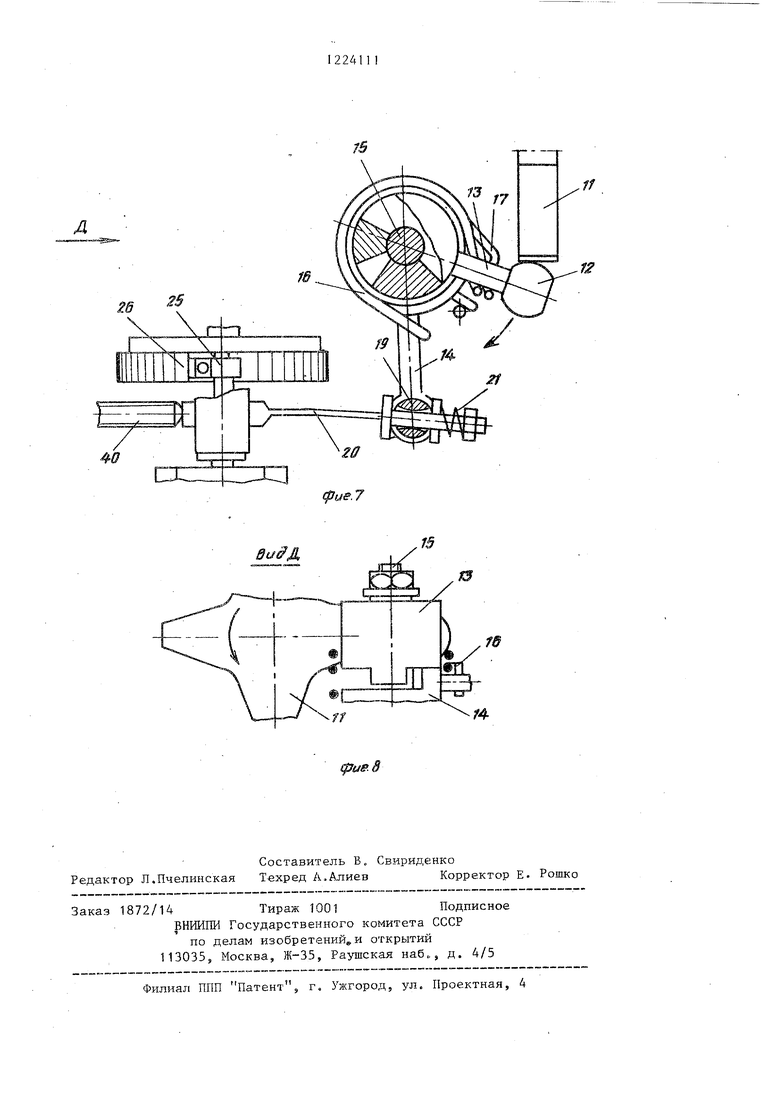
На фиг. 1 изображен автомат для резки электроизоляционных трубок, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2j на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 -.механизм подачи в момент начала подачи разрезаемой трубки; на фиг. 6 - вид Г на фиг. 5; ни фиг.7 - механизм подачи в момент окончания подачи разрезаемой трубки; на фиг.8 - вид Д на фиг. 7.
Автомат для резки электроизоляционных трубок содержит электродвигатель 1, червячный редуктор 2, который через муфту 3 соединен со шпинделем 4, на левом конце которого выполнен квадратный хвостовик, на котором установлен четырехлезвийный.нож 5 со ско
1
креплена собачка, установленная с возможностью взаимодействия с храповым колесом приводного ролика, а свободньи конец гибкой тяги расположен с возможностью взаимодействия с упорным винтом, закрепленным в корпусе.
Зо Автомат по пп, 1 и 2, о т л и- чающийся тем, что механизм подачи снабжен подпружиненньм балансиром, установленным одним концом в корпусе с возможностью регулировочного перемещения, при этом прижимной ролик выполнен приводным и установлен на свободном конде подпружиненного балансира,
4. Автомат попп. 1 -3, отличающийся тем, что привод, прижимного ролика выполнен в виде зубчатой передачи и 1сарданного вала.
5,. Автомат попп, 1 -4, отличающийся тем, что шарниры карданного вала выполнены в виде втулок из упругого материала.
X
шенньми под углом 40° к направлению движения режущими кромками, и диск 6. Диск 6 вьшолнен с двумя рядами отверстий под разрезаемый материал различного диаметра, расположенные по окружности равноудаленно от центра диска, и фиксирующими отверстиями, расположенными на линии, соединяющей центр отверстия под разрезаемьй матер иал с центром диска 6, Отверстия под разрезаемый материал выполнены в соответствии с диаметрами разрезаемых трубок 7. Четырехлезвийньй нож 5 подпружинен относительно диска 6
пружиной 8, который установлен с возможностью продольно-поворотного перемещения и фиксации путем взаимодействия фиксирующего отверстия и фиксирующего штифта 9, закрепленного в
корпусе 10. На правом конце шпинделя 4 закреплен четырехпрофи-пьный плоский кулачок 11, который через боч- бочкообразный ролик 12 имеет возможность взаимодействовать с плечом верхнего пространственного рычага 13. Пространственный рычаг 13 взаимодей312241
ствует своим вторым плечом с нижним i пространственным рычагом 14, закрепленным на оси 15. Пространственные рычаги 13 и 14 подпружинены один от- носительно другого пружиной 16, а 5 возвратная пружина 17 закреплена одним концом на верхнем пространственном рычаге, другим - на корпусе.
Свободное плечо пространственного рычага 14 выполнено в виде вилки 18, 0 в проушинах которой установлена ось 19 с коническим отверстием, в котором закреплен правьш конец гибкой тяги 20, подпружиненной пружиной 21. Левый конец гибкой тяги 20 соединен 5 посредством пальца 22 с Г-образной кулисой 23, в которой на оси 24 установлена собачка 25, входящая в зацепление с храповым колесом 26, установленным на валу 27-приводного 20 ролика 28. Поджимной ролик 29 вьтол- нен приводным посредством зубчатьпс колес 30 и 31, карданного вала 32, и промежуточного вала 33. Втулки 34 карданного вала 32 .выполнены, из уп- 25 ругого материала. Поджимной ролик 29 установлен на валу 35 подвижно на свободном концу балансира 36, другой конец которого установлен на оси 37. Балансир 36 подпружчнен по- 30 средством пружины 38 и регулировочного винта 39. Упорный винт 40 ограничивает перемещение гибкой тяги 20,
Автомат для резки электроизоляционных трубок работает следующим образом.
Вращение от электродвигателя 1 через червячный редуктор 2, муфту 3 передается на шпиндель 4, четырех- лезвийньй нож 5 и четырехпрофильный плоский кулачок 1V, который своими выступами нажимает на бочкообразный ролик 12 и поворачивает пространст- венньш верхний рычаг 13 и связанный
5
0 5 0 5 0
0
11
с ним нижний рычаг 14, который приводит в движение Г-образную кулису 23 через гибкую тягу 20, Собачка 25, установленная на оси 24, приводит в движение храповое колесо 26 и приводной ролик 28, От вала 27 приводного ролика 28 через зубчатые колеса 30 и 31 вращение передается валу 32, промежуточному валу 33,втулкам 34 и валу 35 поджимного ролика 29. Синхронное вращение приводного 28 и поджимного 29 роликов с четырех- лезвийным ножом 5 осуществляет подачу трубки 7 в зону отрезки, В зависимости от диаметра трубки 7 расстояние /У между приводным роликом 28 и поджимным роликом 29 может изменяться за счет поворота балансира 36 под действием пружины 38 и регулировочного винта 39, Для регулировки длины отрезки трубки 7 упорным винтом 40 ограничивают, ход гибкой тяги 20 и связанной с ней Г-образной кулисы 23, которая определяет угол поворота поджимного ролика 29, при этом пружина 16, удерживающая верхний 13 и нижний 14 рычаги в разведен- ном положении, закручивается, что позволяет поворачиваться верхнему рычагу 13 при неподвижном нижнем рычаге 14, При смене диаметра трубки 7, соответствующее направляющее отверстие Р диска 6 устанавливают в рабочую зону путем отвода диска 6 от торца Т корпуса 10 до выхода штифта 9 из фиксирующего отверстия S и поворота направляющего диска 6 в соответствующее положение. Пружина
8подожмет направляющий диск 6 к торцу Т корпуса 10, при этом штифт
9войдет в соответствующее фиксирующее отверстие. Гибкая тяга 20 позволяет передавать движение от сухаря 19 Г-образной кулисы 23 без дополгда- тельного сферического щарнира.
BtiSA
фа, г
0t/9 & noffeptf ffff
в- в
Г
ff
сриз.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поперечной резки длинномерного материала | 1987 |
|
SU1479284A1 |
| Автомат для изготовления секций электрических машин | 1975 |
|
SU693512A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| АВТОМАТ ДЛЯ СБОРКИ СЕЛЕНОВЫХ ВЫПРЯМИТЕЛЕЙ | 1948 |
|
SU76659A1 |
| Устройство для изготовления электроизоляционных трубок | 1988 |
|
SU1686498A1 |
| АВТОМАТ для РЕЗКИ И МАРКИРОВКИ ХЛОРВИНИЛОВЫХ ТРУБОК | 1973 |
|
SU363611A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПЛАСТИН И СБОРКИ СЕКЦИЙ РЕБРИСТЫХ РАДИАТОРОВ | 1997 |
|
RU2124976C1 |
| Машина для мытья, ополаскивания и сушки бутылок | 1927 |
|
SU25415A1 |
| Устройство для многоколенной пространственной гибки труб | 1985 |
|
SU1268245A1 |
| Ткацкий автомат для выработки бортовой ткани | 1960 |
|
SU137470A1 |
rr f4
д
т
26
25
0
IS
..J:
gjue.7
1
Составитель В, Свирид€;нко Редактор Л.Пчелинская Техред А.Алиев Корректор Е. Рошко
Заказ 1872/14 Тираж 1001Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений н открытий 113035, Москва, Ж-35, Раушская наб„, д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
| Патент США № 4341136, кл | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
