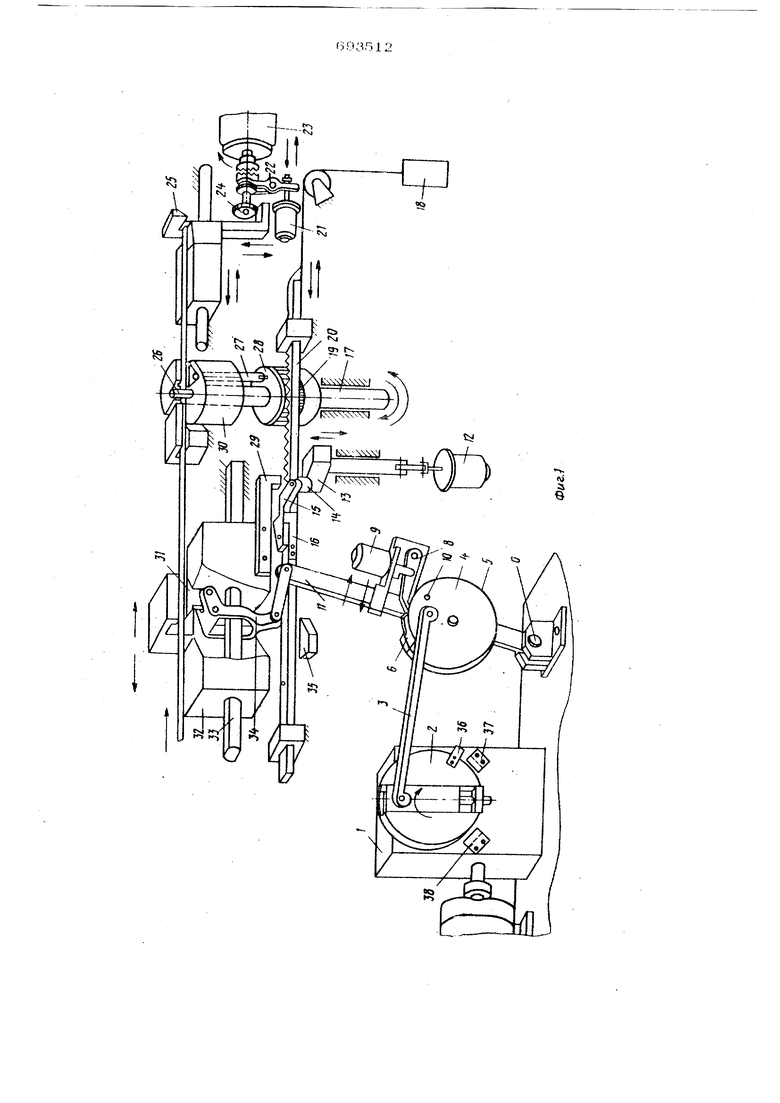
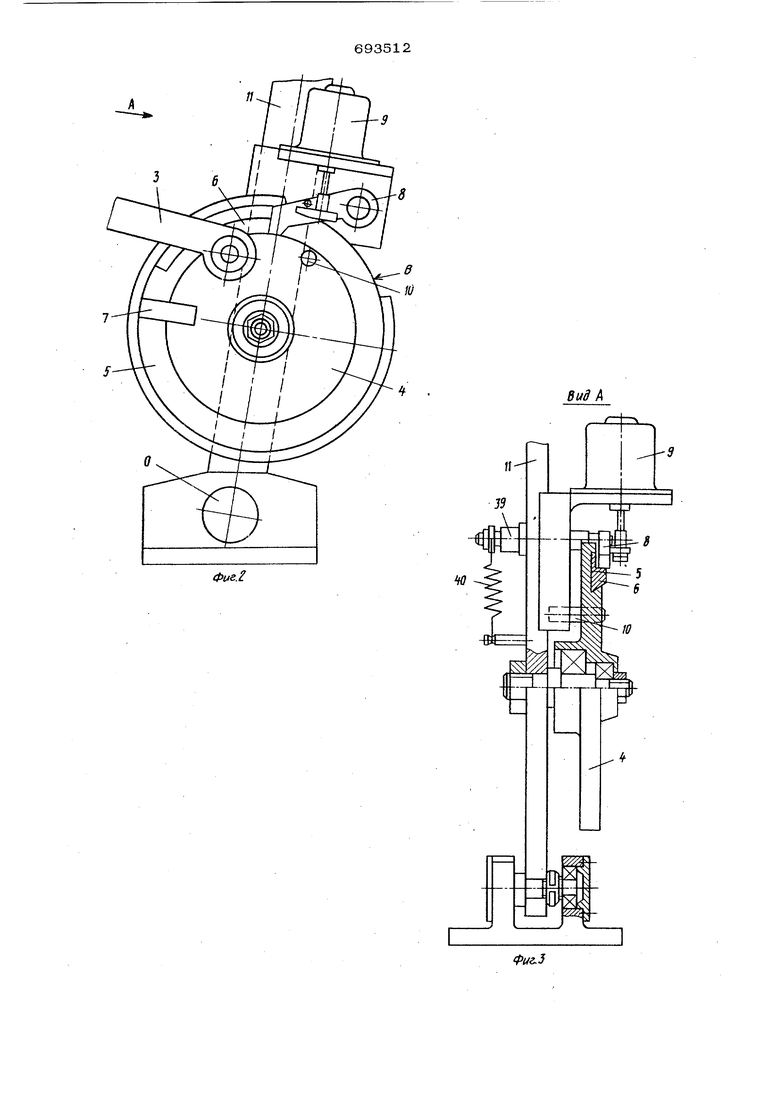
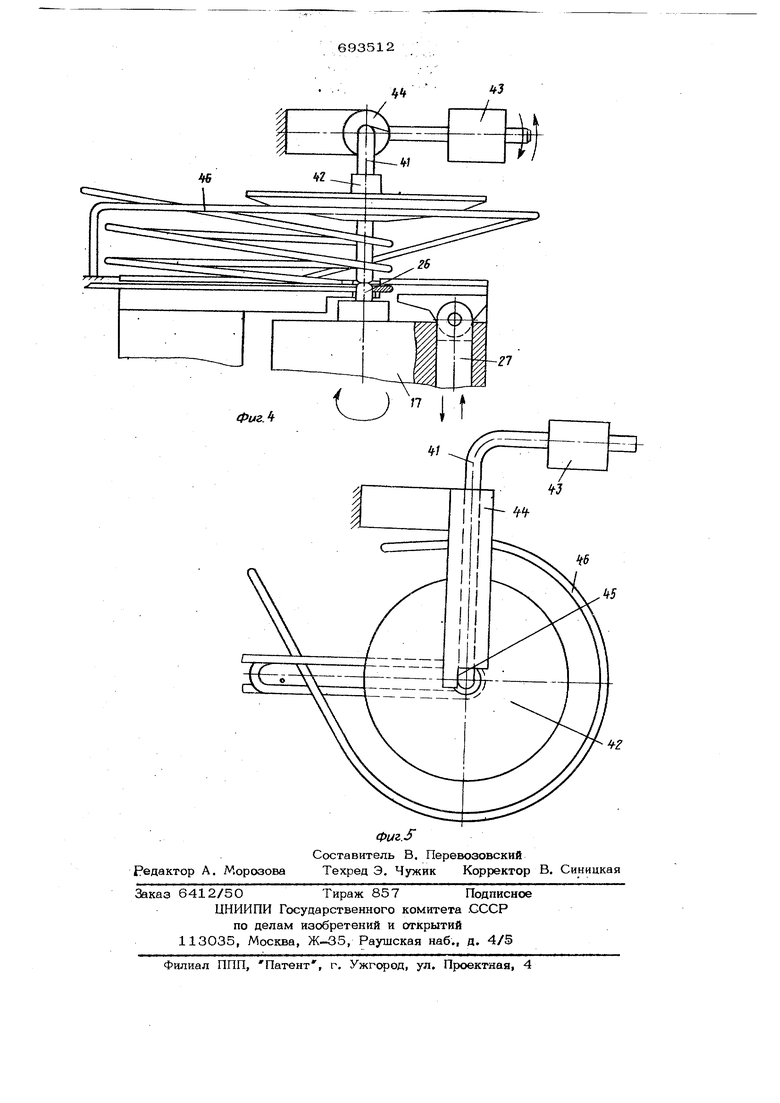
Изобретение относится к технологическому оборудованию для изготовления электрических машин и может быть использовано в электромашиностроении и электротехнической промышленности. Известен автомат для изготовления секции электрических машин, содержащий станину, механизм для подачи шинного провода с приводом, выполненный в виде клеш;евого захвата, механизм для отмера длины провода, связанный с приводом механизма подачи, устройство для гибки провода на ребро, содержащее гибочный палец rf захват, ножевой блок и систему 1 управления l. Известный автомат не обеспечивает изготовление секций больших размеров и имеет низкую производительность из-з неустойчивости многовитковых секций на оправке при изгибе. Целью изобретения является повышение производительности н расиш{зение технологических возможностей автомата Это достигается тем, что механизм для гибки, провода на ребро содержит Г-образный стержень, один конец которого контактирует с гибочным пальцем и несет на себе диск, а на другом - установлен регулируемый груз, направляющий трубчатый элемент, внутри которого установлен вышеупомянутый стержень с упором, расположенным со стороны выхода стержня к гибочному пальцу и спираль, установленную над механизмом гибки провода на ребро, концы которой жестко закреплены на станине, а гибочный палец расположен внутри спирали, кроме того, механизм для отмера длины провода выполнен в виде диска с цовым пазом, внутри которого установлен -ступенчатый упор с фиксатором и контактирующей с ним собачкой, управляемой электромагнитом. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - механизм для отмера длины провода; на фиг. 3 - вил по стрелке А на фиг. 2; на фиг. 4 - верхняя часть механизма для гибки прск вода на ребро; на фиг. 5 - то же, вид сверху. Автомат содержит привод с редуктором 1, кривошип 2, шатун 3, диск 4 с кольцевым пазом 5, выполненным по торцу диска в форме ласточкина хвоста сменный ступенчатый упор 6 с фиксато ром 7, собачку 8, управляемую электромагнитом 9, ведущий штифт 10, кулису 11, электромагнит 12 включения рейки, упор 13 включения рейки, ролик 14, рычаг 15 включения рейки, пружину 16 рычага, вал 17 реечного колеса, груз 18, реечное колесо 19, рейку 2О, электромагнит 21 ножевого блока; рычаг включения механигзма 22 отрезки, привод 23 ножевого блока,кулачок 24, нож 25, сменный гибочный палец 26,, зажим 27, торцовый кулачок 28, зацеп 29, гибочный барабан 30, захват 31 ме ханизма подачи, каретку 32, направляющую 33 каретки, серьгу 34 механизма зажима, упор 35, лепесток 36, конечный выключатель 37 запуска счетчиков, конечный выключатель 38 для счета ходов подачи, ось 39 собачки механизма для отмера провода, пружину 4О собачки Механизм для гибки провода -на ребро со держит Г-образный стержень 41 (см. фиг. 4), один конец которого контактирует с гибочным пальцем 26 и несет на себе диск 42, а на другом - установлен регулируемый груз 43, направляющий трубчатый элемент 44, внутри которого установлен стержень 41 с упором 45, расположенным со стороны выхода упомя нутого стержня к гибочному пальцу 26 и спираль 46, установленную над механизмом гибки провода, концы которой жестко закреплены на станине (на чертеже не показана), а гибочный палец 26 расположен внутри спирали. Механизм для отмера длины провода выполнен в ви де диска 4 с кольцевым пазом 5, внутри которого установлен ступенчатый упор 6 с фиксатором 7 и контактирующей с ним собачкой 8, управляемой электромй гнитом 9./ Устрвйство работает следующим образом. Механизм отрезки провода устанавливается ножом 25 с приводом 23 от цент ра гибочного пальца 26 на расстоянии, равном длине катушки и ее короткого вы водного конца, при этом провод протягивается до ножа. В кольцевой паз диска 4-через срез В (см. фиг. 2) устанавливается сменный ступенчатый упор 6 и гибочный палец 26 радиусом, соответствующим наматываемой катушке. Высота гибочного пальца 26 должна быть равна толщине провода, а при многорядной на- могке - толщине всех проводов. Затем с помощью переключателей, расположенных на пульте управления, устанавливается программа электронным счетчиком на количество начальных подач, на количество изгибов и на количество укороченных подач. После настройки автомата на один из типоразмеров катушки включают привод кулисы 11 и привод ножа 25, От редуктора 1 через кривошип 2 получает движение шатун 3, который связан с диском 4. Лепесток .36, закрепленный на кривошипе, проходит через паз конечного выключателя и запускает электронный счетчик. Диск 4 находится в зацеплении с собачкой 8 через сменный ступенчатый упор 6. Установленный на дис. ... . л,. ке 4 ведущий штифт 10 качает кулису 11 вокруг оси О. При движении кулисы вправо через серьгу 34 захват 31 мехайТ1зма подачи вначале прижимает провод к каретке 32, а затем каретка вмес- те с проводом двигается по направляющей 33 до тех пор, пока не дойдет до крайнего положения, когда кулиса 11 изменяет направление движения и захват 31 механизма подачи освобождает провод, зацеп 29 через рычаг 15 перемешает рейку 2О влево. Установленное на валу 17 реечное колесо 19, находящееся в зацеплении с рейкой, поворачивается. При этом торцовой кулачок 28 зажимом 27 прижимает провод в гибочном барабане ЗО, который вращаясь, изгибает провод вокруг гибочного пальца 26 на 18О . Каретка 32, не доходя до крайнего левого положения рычага включения рейки 15, находит на упор 35, выходит из зацепления с зацепом 29 и рейка 2О под действием груза 18 возвращается в правое положение, при этом зажим 27 освобождает провод и гибочный барабан поворачивается в исходное положение. При повторном изгибе начальный выводной конец провода заходит на спираль 46 и цикл продолжается до тех пор, пока количество изгибов не достигнет числа, установленного на электронном счетчике. Когда будет достигнуто нужное число изгибов, электронный счетчик числа изгибов, дает сигнал на электромагнит 12, который вьщвигает упор 13. При этом рычаг 15 своим роликом 14 накатывает- ся на упор 13 (рейка движется вправо под действием груза) и рычаг 15 смещается в сторону от зацепа 29. При движении каретки 32 вправо, гибочный барабан 30 не вращается и изгиба провода не происходит, а каретка подает не- зажатый провод в гибочный барабан, при этом витки катушки поворшивают верхнюю часть гибочного пальца с диском 42 по . направлению движения провода вокруг трубчатого элемента 44, Когда витки катушки пройдут гибочный палец с фланцем, последний возвращается в исходное положение под действием груза 43, а когда ; каретка 32 сделает столько ходов, сколько витков в катушке и плюс количество полных длин катушки, входит в длинный выводной конец. После этого подается провод на величину меньше длины катушки за счет того, что электромагнитный счетчик последних ходов дает команду электромагниту 9, который поднимает собачку 8, и зуб последней заходит в уступ сменного ступенчатого упора 6, при этом получается короткий ход каретки и провод подается на длину некратную длине катушки. После последней короткой подачи получает сигнал электромагнит 21, который через рычаг 22, храповую муфту (на чертеже не показана) и кулачок 24, включает нож 25, который отрезает готовую катушку.
После включения электромагнита 21 сбрасывается команда с электронного счетчика. Далее цикл повторяется.
Эффективность применения предлагаемого автомата по сравнению с существующими конструкциями заключается в повышении производительности и расширении технологических возможностей автомата за счет, выполнения механизма для гибки провода на ребро в виде Г-образного стержня, контактирующего с гибочным пальцем, снабженного диском и регулируемым грузом, расположенным, внутри трубчатого элемента с упором со сторо-
вода на ребро, содержащее гибочный палец и зажим, ножевой блок и систему управления, отличающийся тем, что, с целью повьш1ения произво- дительности и расширения технологических возможностей автомата, механизм для Гибки провода на ребро содержит Г-юбразный стержень, один конец которого контактирует с гибочным пальцем.и несет на себе диск, а на другом - установлен регулируемый груз, направляющий трубчатый элемент, внутри которого установлен вьш1еупомянутый стержень с упором, расположенным со стороны выхода стержня к гибочному пальцу и спираль, установленную над механизмом гибки провода на ребро, концы которой жестко закреплены на станине, а гибочный палец расположен внутри спирали,
2, Автомат по п. 1, отличающийся тем, что, механизм для отме- ра длины провода выполнен в виде диска с торцовым пазом внутри которого установлен ступенчатый упор с фиксатором и контактирующей с ним собачкой, управляемой электромагнитом,
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке № 1831829/О7, кл. Н 02 К 15/04, 1972,. ны выхода стержня к гибочному пальцу И спирали, установленной над механизмом гибки, концы которой жестко закреплены На станине. Формула изобретения 1. Автомат для изготовления секций электрических машин, содержащий станину, механизм для подачи шинного провода с приводом, выполненный в виде клещевого захвата, механизм для отмера длины провода, связанный с приводом меха- низма подачи, устройство для гибки проФиг
Вид /(
Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU536871A1 |
| Автомат для гибки проволоки | 1989 |
|
SU1664444A1 |
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
| Устройство для многоколенной пространственной гибки труб | 1985 |
|
SU1268245A1 |
| Автомат для изготовления изделий из листового материала | 1981 |
|
SU1033347A1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| Навивочное устройство автомата для изготовления спиральных пружин | 1977 |
|
SU657894A1 |
| Автомат для отрезки и гибки проволочных деталей | 1979 |
|
SU874246A1 |
| Автомат для изготовления секций электрических машин | 1972 |
|
SU608234A1 |
| Станок для изготовления секций электрических машин | 1972 |
|
SU493862A2 |
Ш
