o
О5 00
ю
4
сд Изобретение относится к машиностроению, касается усовершенст ювания устройства для многоколенной пространственной гибки труб и может быть использовано, например, при изготовлении гидро- и пневмоаппаратуры в различных отраслях промынь ленности. Цель изобретения - упрощение конструкции путем сокращения количества приводных и управляющих механизмов. На фиг. 1 изображено устройство, общий вил; на фиг. 2 - узел привода гибочного механизма; на фиг. 3 - узел поворота и фиксации управляющего барабана; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - узел системы полуавтоматического управления устройством. Устройство содержит основание 1 и неподвижную плиту 2, между которыми расположены вертикальные щтанги 3 и управляющий барабан 4. На цилиндрической поверхности барабана закреплена винтовая спираль 5 привода поворота барабана и размещены переставные упоры 6. На управляющем барабане со стороны его торн,а установлен подвижный и подпружиненный в осевом направлении посредством пружин 7 кулачковый диск 8, на котором размещена система упоров 9. Число кулачков на диске 8 выбирается меньщим на одно от количества изгибов трубы. На вертикальных п тангах 3 установлена каретка 10 продольной подачи, взаимодействующая посредством ограничителя 11 с упорами 6 и винтовой спиралью 5 управляющего барабана 4. На каретке продольной подачи установлена с возможностью относительного перемещения зубчатая рейка 12, соединенная с щестерней 13, закрепленной на поворотном валу зажимного патрона 14, предназначенного для закрепления обрабатываемой труб1,| 15, а также ограничители 16 и 17 перемещения этой рейки. На основании 1 соосно патрону 14 установлен гибочный механизм, включающий матричный ролик 18 и огибаюпдий ролик 19, закрепленный посредством водила 20 на валу 21, на консольной части которого размещена щестерня 22, соединенная с зубчатой рейкой 23. На этой рейке расположены ограничитель 24, взаимодействующий с упорами 9, а также гайки 25 и 26. Рейка 23 входит одним концом в полость одного из щтоков 27 пневмоцилиндра 28, снабженного пробкой 29. Между гайкой 26 и пробкой 29 установлена винтовая пружина 30. Второй щток 31 пневмоцилиндра 28 соединен с кулисой 32, на которой выполнен фигурный паз 33. Через этот паз пропущен качающийся вокруг оси 34 рычаг 35 с щарнирно закрепленной на нем изогнутой осью 36 и собачкой 37, взаимодействующей с храповым колесом 38, установленным на поворотном валу управляюHiero барабана 4. Привод перемещения каретки 10 продольной подачи выполнен в виде трособлочной системы 39 с полиспастом 40, один из концов троса которой закреплен на каретке и образует свободную ветвь, на которой навещен груз 41, а другой, через полиспаст 40, соединенный со штоком пневмоцилиндра 42, - с плитой 2. При этом трос привода перемещения каретки 10 соединен также с зубчатой рейкой 12 привода вращения зажимного патрона 14. На основании 1 установлен пневмоцилиндр 43, щток которого соединен с кулисой 44, снабженной копирными пазами и взаимодействующей с изогнутыми осями 36 и 45. На оси 45 закреплена собачка 46, взаимодействующая с храповым колесам 38. Устройство снабжено также унорами 47, размещенными на одной из вертикальных штанг 3, и установленным на верхнем основании 2 упором 48 и на нижнем основании 1 - упором 49. Пневмоцилиндры 28, 42 и 43 соединены с магистралью сжатого воздуха через пневмокран 50, управляемый посредством подвижного клина 51 с рукояткой и золотникового расп)еделителя 52, закрепленных на кронщтейне 53. На этом кронштейне закреплены также направляющие винты 54 ползуна 55, кинематически взаимосвязанного с одной стороны с золотниковым распределителем 52, а с другой стороны - с кулачковым диском 8, а также роликовый отсекатель 56 и натяжитель 57 пружины 58. Клин 51 посредством качающегося рычага 59 взаимодействует с ползуном 55. На блоке полиспаста 40 закреплена планка 60. Для повышения точности взаимодействия ползуна 55 с кулачковым диском 8 в верхней части ползуна установлен регулировочный винт 61. Устройство работает следуюшим образо.м. Перед началом рабочего цикла клин 51 находится в нижнем положении. Поршни цилиндров 42 и 43 расположены в верхнем положении, а цилиндра 28 - в крайнем нижнем положении. Сжатый воздух через пневмокран 50 нодводится в нижние полости цилиндра 42 и 43, и через золотниковый распределитель 52 - в верхнюю полость цилиндра 28. Верхние полости цилиндров 43 и 42 при этом соединены с атмосферой. Нижняя полость цилиндра 42 соединена с атмосферой постоянно, а нижняя полость цилиндра 28 соединена с атмосферой через золотниковый распределитель 52. Каретка 10 продольной подачи находится в нижнем положении и опирается ограничителем 11 на один из нижних упоров 6 управляюшего барабана 4. В этом положении производится установка трубы 15 в патрон 14. При переводе клина 51 вверх сжатый воздух подается в верхние полости цилиндров 42 и 43 и удаляется из верхней полости цилиндра 28. При перемещении штока пневмоцилиндра 43 вниз кулиса 44 производит поворот изогнутых осей 36 и 45, выводя собачки 37 и 46 из пазов храпового колеса 38. Шток пневмоцилиндра 42 с полиспастом 40 также перемещается вниз, укорачивая свободную ветвь троса, на которой навешен груз 41 и перемещая зубчатую рейку 12 на каретке 10 до упора в ограничитель 17. При соприкосновении зубчатой рейки 12 с упором перемещение ее прекращается и начинается подъем каретки 10 продольной подачи вверх. В ходе подъема каретки ограничитель 11, контактируя с винтовой спиралью 5, производит поворот управляющего барабана 4 в исходное положение. При контакте каретки 10 с упором 48 движение ее вверх прекращается. Это соответствует положению, при котором ограничитель 11 будет находиться над верхнерасположенным упором 6. Рейка 23 находится при этом в крайнем нижнем положении, а ее ограничитель 24 контактирует с упором 49. В конце хода перемещения щтока пневмоцилиндра 42 вниз планка 60 нажимает на клин 51 и производит переключение крана 50 в другое положение. Сжатый воздух при этом подается в нижнюю полость цилиндра 28. Шток пневмоцилиндра 43, перемещая кулису 44 вверх, производит поворот изогнутых осей 36 и 45 и установку собачек 37 и 46 в пазы храпового колеса 38. Под воздействием собственного веса и веса груза 41 каретка 10 продольной подачи опускается вниз до контакта ограничителя 1 1 с верхнерасположенным упором 6, а ограничитель 16 при этом контактирует с верхним упором 47. При поступлении сжатого воздуха в цилиндр 28 его полый шток 27 перемещается вверх с зубчатой рейкой 23. Последняя при этом производит поворот вала 21 и водила 20 с находящимся на нем огибающим роликом 19, который осуществляет гибку трубы 15. Перемещение зубчатой рейки 23 происходит до соприкосновения ограничителя 24 с одним из упоров 9. При этом кулачковый диск 8, сжимая пружины 7, перемещается вверх вместе с ползуном 55, а отсекатель 56 производит переключение золотникового распределителя 52. Сжатый воздух при этом подается в верхнюю полость пневмоцилиндра 28 и его шток 27 перемещается вниз. Одновременно со штоком перемещается вниз зубчатая рейка 23, прижатая пружиной 30 к штоку. Рейка 23 при своем перемещении производит поворот водила 20 вместе с огибающим роликом 19 в обратное положение. Перемещение рейки вниз происходит до соприкосновения ограничителя 24 с упором 49. Это соответствует положению. при котором огибающий ролик 19 занимает исходное до гибки трубы положение. При дальнейшем перемещении штока 27 вниз происходит сжатие пружины 30 пробкой 29, кулиса 32 опускается далее вниз и производит поворот рычага 35, а посредством собачки 37 и храпового колеса 38 - поворот управляющего барабана 4 на один зуб. При этом ограничитель 1 I соскальзывает с упора 6 и каретка продольной подачи 10 под действием собственного веса перемещается вниз до соприкосновения этого ограничителя с нижерасположенным упором 6. Ограничитель 16 скользит по упору 47 и, дойдя до его нижнего торца, соскальзывает с него на следующий. Зубчатая рейка 12 при этом под действием груза 40 перемещается влево, поворачивая патрон 14 с закрепленной в нем трубой 15 на новую плоскость гиба. Перемещение этой рейки происходит до соприкосновения ограничителя 16 с очередным нижерасположенным упором 47 В этом положении трубка 15 подготовлена для гиба очередного колена. В момент окончания поворота барабана 4 кулачковый диск 8 взаимодействует с ползуном 55 и отсекатель 56 производит переключение золотникового распределителя 52. Зубчатая рейка 23 снова перемещается вверх, производя гибку очередного колена трубы. Цикл работы цилиндра 28 повторяется до гиба предпоследнего колена. После гиба последнего колена поршень цилиндра 28 останавливается в нижнем положении. Таким образом, в предлагаемом устройстве для многоколенной пространственной гибки труб вертикальное перемещение каретки продольной подачи вниз осуществляется под действием собственного веса, приводы вращения зажимного патрона и перемещения каретки продольной подачи, а также приводы гибочного механизма и управляющего барабана совмещены, заданная последовательность их действия осуществляется без системы датчиков и исполнительных органов, имеющих место в известном устройстве. Это уменьшает количество приводных и управляющих механизмов и упрощает кинематические связи между ними. Формула изобретения Устройство для многоколенной пространственной гибки труб, содержащее установленный на основании приводной гибочный механизм, зажимной патрон с реечно-niecтеренчатым приводом его вращения, установленный на каретке продольной подачи, снабженной пневмоприводом, размещенной на направляющем узле и взаимодействующей с переставными упорами, размещенными на приводном управляющем барабане, а также две системы упоров, взаимодействующих соответственно с приводами гибочного механизма и зажимного патрона, отличающееся тем, что, с целью упрощения конструкции путем сокращения количества приводных и управляющих механизмов, направляющий узел выполнен в виде неподвижной плиты и вертикальных щтанг, закрепленных одними концами на основании, а другими - на неподвижной плите, привод вращения управляющего барабана выполнен в виде винтовой спирали, закрепленной на его боковой поверхности с возможностью взаимодействия с кареткой продольной подачи, привод перемещения каретки выполнен в виде трособлочной системы с полиспастом, один конец троса которой закреплен на каретке и образует свободную ветвь, а другой соединен через полиспаст со штоком пневмоцилиндра и закреплен на неподвижной плите, и груза, установленного на свободной ветви, рейка привода вращения зажимного патрона установлена на каретке и соединена с тросом привода ее перемещения, система упоров, взаимодействующих с приводом гибочного механизма, снабжена кулачковым диском, установленным с возможностью осевого перемещения на управляющем барабане со стороны его торца и кинематически связанным с пневмоприводом, а система упоров, взаимодействующих с приводом вращения зажимного патрона, размещена на вертикальных штангах.
(раг.Ъ

| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочный станок | 1965 |
|
SU456661A1 |
| Устройство для многоколенной гибки труб | 1990 |
|
SU1734907A1 |
| Трубогибочный автомат | 1986 |
|
SU1526871A1 |
| Устройство для многоколенной гибки труб | 1979 |
|
SU776703A1 |
| Устройство для гибки петли из проволоки | 1989 |
|
SU1745397A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулирующее устройство | 1982 |
|
SU1093537A1 |
| УСТРОЙСТВО для МНОГОКОЛЕННОЙ ГИБКИ ТРУБ | 1973 |
|
SU405626A1 |
| СТАНОК ДЛЯ ГИБКИ 1РУБ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1970 |
|
SU258829A1 |
| Токарный станок | 1983 |
|
SU1158296A1 |
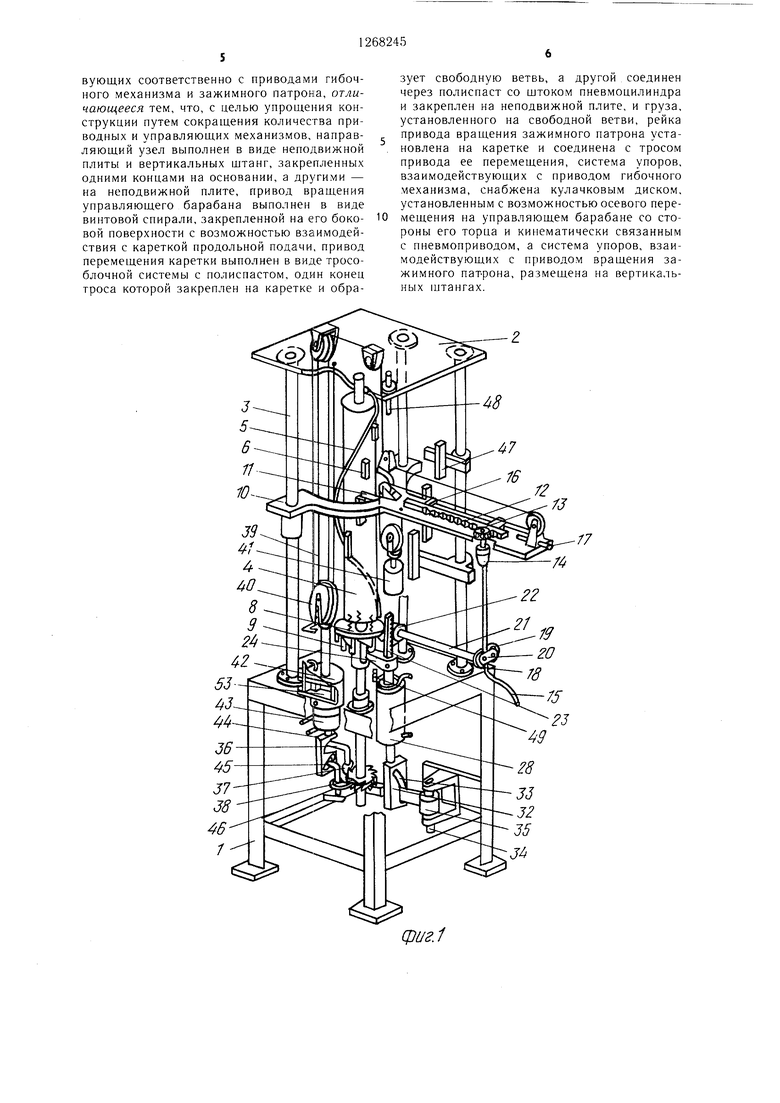


Изобретение относится к устройствам для гибки труб и направлено на сокращение числа приводных и управляющих механизмов. Устройство содержит основание и неподвижную плиту, между которыми установлены вертикальные щтанги (ВШ) и управляющий барабан с размещенными на его цилиндрической поверхности переставными упорами и винтовой спиралью. Каретка (К) продольной подачи, размещенная на ВШ, имеет возможность взаимодействия с винтовой спиралью посредством упора. Привод выполнен в виде трособлочной системы с полиспастом, при этом один конец троса закреплен на каретке и образует свободную ветвь, на которой установлен груз, а другой соединен через полиспаст со IHTOKOM пневмоцилиндра и закреплен на неподвижной плите. Управление вращением зажимного патрона осуществляется посредством зубчатой рейки, соединенной с тросом привода перемещения К и установленной на ней, (О а также системы упоров, размещенных на ВШ. Гибочный механизм связан с приводом (Л через систему упоров, выполненную в виде кулачкового диска с упорами. Диск расположен на управляющем барабане со стороны его торца. 5 ил.
| УСТРОЙСТВО для МНОГОКОЛЕННОЙ ГИБКИ ТРУБ | 0 |
|
SU405626A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Трубогибочный станок | 1965 |
|
SU456661A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
