2. Гидравлический подъемник для подъемной платформы по п. 1, отличающийся тем, что он снабжен механизмом перемещения гайки, содержащим взаимодействующую с зубьями, выполненными на гайке.
Изобретение относится к подъемно-транспортному машиностроению, в частности к гидравлическим подъемным устройствам непрерывного действия для самоподъемных платформ.
Цель изобретения - улучшение эксплуатационных свойств.
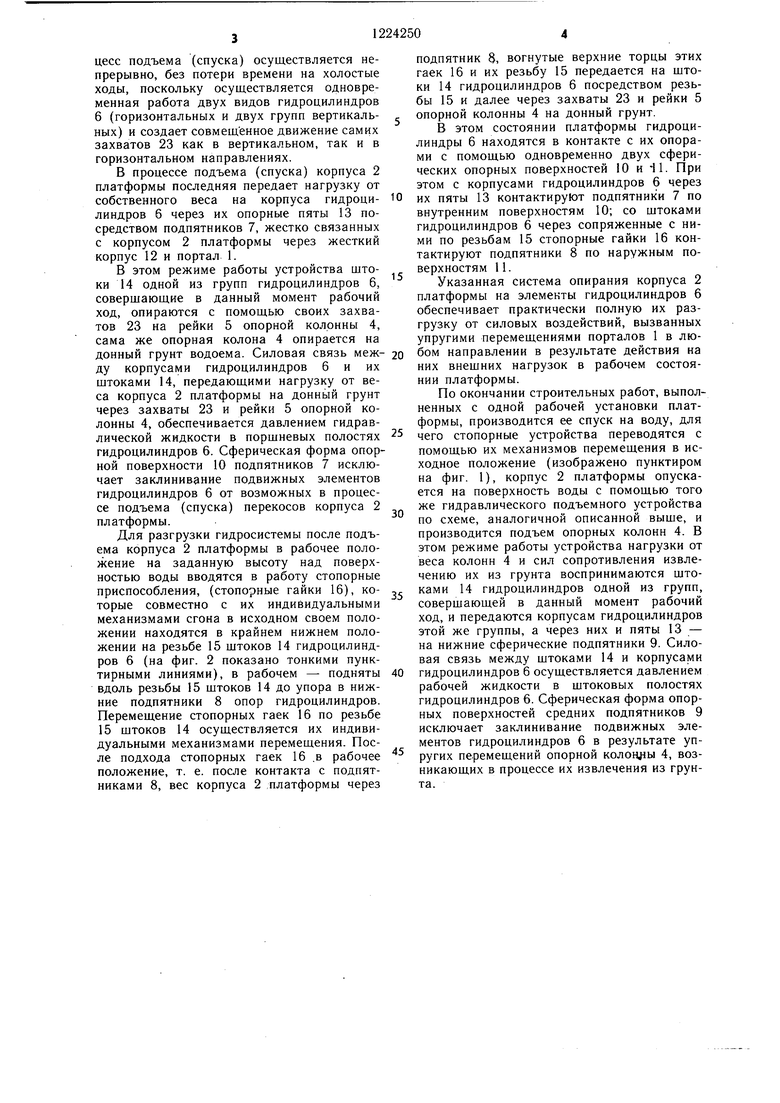
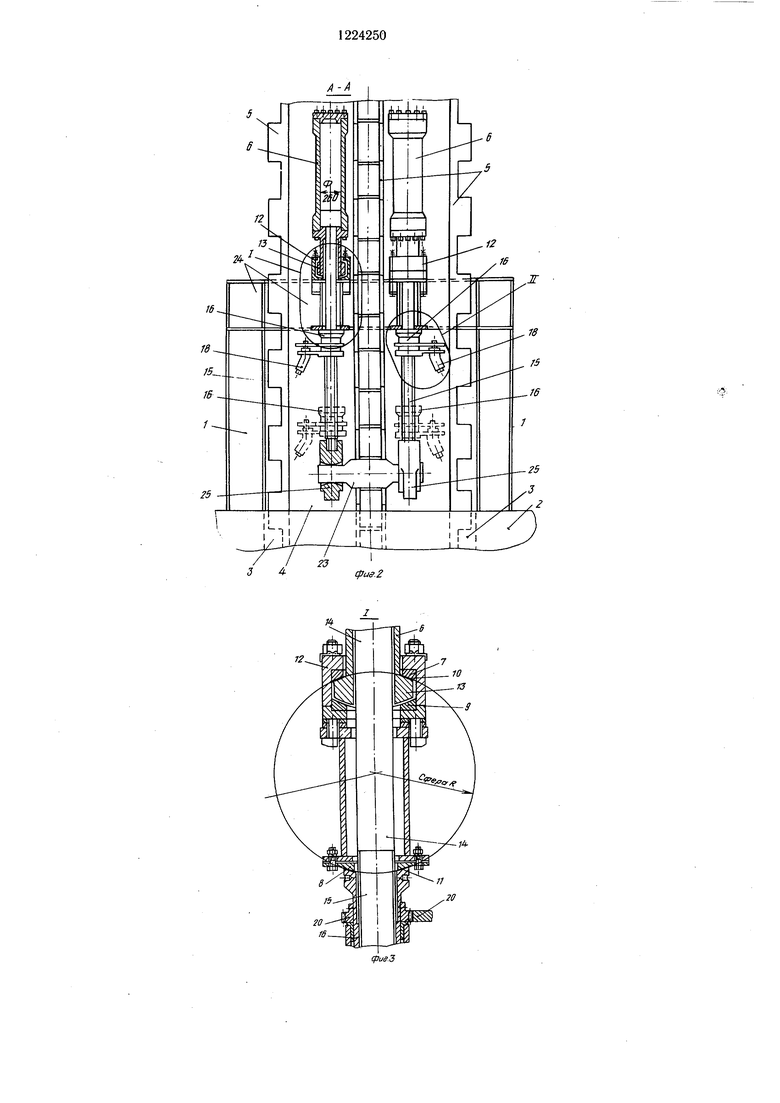
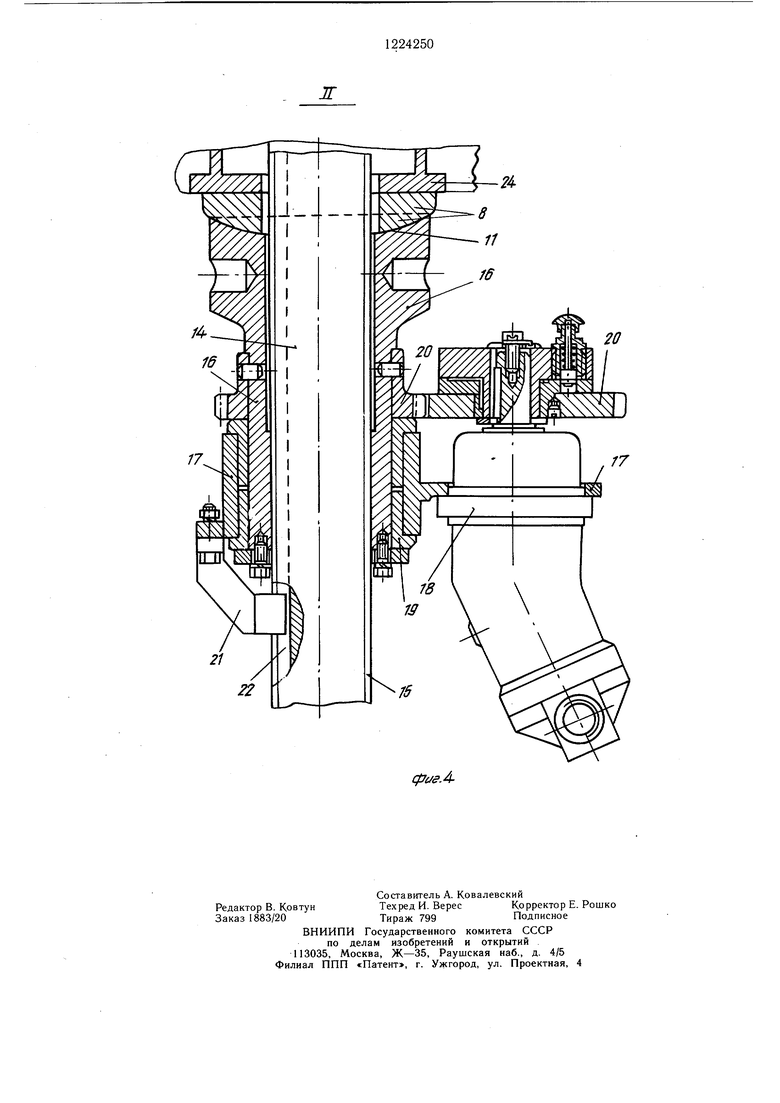
На фиг. 1 показано устройство, вид в плане; на фиг. 2 - разрез А-А на фиг.. 1; на фиг. 3 - узел I на фиг. 2, опора гидро- цилиндра; на фиг. 4 - узел II на фиг. 2 (подвижная гайка с механизмом перемещения) .
Устройство включает портал 1, жестко связанный с корпусом 2 платформы над шахтой 3, в которой размещена опорная колонна 4, снабженная четырьмя рейками 5. На портале 1 смонтированы четыре пары гидроцилиндров 6 подъемного устройства. Каждый гидроцилиндр 6 имеет опору, выполненную в виде верхнего 7, нижнего 8 и среднего 9 сферических одинаковой кри- визны подпятников, жестко связанных с порталом 1.
Верхний 7 и нижний 8 подпятники имеют общий центр кривизны и расположены диаметрально, при этом верхний подпятник 7 контактирует с гидроцилиндром 6 своей внутренней сферической поверхностью 10, а нижний подпятник 8 - наружной сферической поверхностью 11 относительно общего центра кривизны. Кроме того, верхний 7 и средний 9 подпятники заключены в единый жесткий корпус 12. В последнем размешена двояковыпуклая опорная пята 13 корпуса гидроцилиндра 6, взаимодействующая с подпятниками 7 или 9. При этом двояковыпуклая пята гидроцилиндра и подпятники 7, 8 и 9 смонтированы концент- рично относительно вертикальной оси гидроцилиндра 6 и имеют сквозные отверстия для прохода штока 14 гидроцилиндра 6. На штоке 14 имеется резьба 15, по которой перемещается стопорная гайка 16, выполнен- ная с вогнутым торцом, контактирующим с нижним подпятником 8 через его наружную сферическую поверхность 11. На самой стопорной гайке 16 смонтирован корпус 17 с приводом 18 посредством втулки 19. В качестве привода 18 может быть использован как электрический, так и гидравлический.
приводную щестерню, смонтированную в корпусе привода, охватывающем щток гидроцилиндра, в котором выполнен продольный щпоночный паз и в нем расположена шпонка, закрепленная на корпусе привода.
В свою очередь привод 18 взаимодействует со стопорной гайкой 16 посредством передачи 20. При этом корпус 17 снабжен шпонкой 21, скользящей в продольном шпоночном пазу 22 штока 14, обеспечивая совместное перемещение гайки 16 и ее механизма перемещения вдоль резьбы 15 щто- ка 14.
На концах щтоков 14 спаренных гидроцилиндров 6 смонтирован захват 23, взаимодействующий с соответствующей рейкой 5 опорной колонны 4. Для подъема одной колонны 4 или корпуса 2 платформы имеются восемь спаренных гидроцилиндров 6, которые разбиваются на две группы гидроцилиндров (по четыре в каждой), расположенные под 90°, а в каждой группе имеются две пары диаметрально расположенных гидроцилиндров. Верхний 7 и средний 9 под- пятники,объединенные жестким корпусом 12, расположены на портале 1 на его горизонтальной балке 24, а нижний подпятник 8 - под балкой 24. Захват 23 смонтирован на спаренных гидроцилиндрах 6 с помощью ползунов 25, а каждый захват 23 снабжен гидроцилиндром горизонтального перемещения (не показан).
Устройство работает следующим образом.
Захваты 23 первой группы гидроцилиндров 6, диаметрально расположенных, вводятся в зацепление с опорной колонной 4 с помощью гидроцилиндров горизонтального перемещения (не показаны) и совершают рабочий ход (перемещения колонны 4 или корпуса 2 платформы); в это время захваты 23 другой группы гидроцилиндров 6 выходят из зацепления с опорной колонной 4 и совершают встречное движение относительно направления движения захватов первой группы гидроцилиндров 6 без нагрузки, совершая холостой ход. По окончании цикла захваты 23 второй группы гидроцилиндров 6, совершавшие холостой ход, вводятся в зацепление с опорной колонной 4 (с помощью гидроцилиндров горизонтального перемещения) и совершают рабочий ход (перемещая колонну 4 или корпус 2 платформы), в это время захваты 23 первой группы гидроцилиндров 6, выйдя из зацепления с колонной 4, совершают встречный холостой ход. Таким образом, про
цесс подъема (спуска) осуществляется непрерывно, без потери времени на холостые ходы, поскольку осуществляется одновременная работа двух видов гидроцилиндров 6 (горизонтальных и двух групп вертикаль- ных) и создает совмещенное движение самих захватов 23 как в вертикальном, так и в горизонтальном направлениях.
В процессе подъема (спуска) корпуса 2 платформы последняя передает нагрузку от собственного веса на корпуса гидроци- линдров 6 через их опорные пяты 13 посредством подпятников 7, жестко связанных с корпусом 2 платформы через жесткий корпус 12 и портал 1.
В этом режиме работы устройства штоки 14 одной из групп гидроцилиндров 6, совершающие в данный момент рабочий ход, опираются с помощью своих захватов 23 на рейки 5 опорной колонны 4, сама же опорная колона 4 опирается на донный грунт водоема. Силовая связь меж- ду корпусами гидроцилиндров б и их щтоками 14, передающими нагрузку от веса корпуса 2 платформы на донный грунт через захваты 23 и рейки 5 опорной колонны 4, обеспечивается давлением гидравлической жидкости в поршневых полостях гидроцилиндров 6. Сферическая форма опорной поверхности 10 подпятников 7 исключает заклинивание подвижных элементов гидроцилиндров 6 от возможных в процессе подъема (спуска) перекосов корпуса 2 платформы.
Для разгрузки гидросистемы после подъема корпуса 2 платформы в рабочее положение на заданную высоту над поверхностью воды вводятся в работу стопорные приспособления, (стопорные гайки 16), ко- торые совместно с их индивидуальными механизмами сгона в исходном своем положении находятся в крайнем нижнем положении на резьбе 15 штоков 14 гидроцилиндров 6 (на фиг. 2 показано тонкими пунктирными линиями), в рабочем - подняты вдоль резьбы 15 штоков 14 до упора в нижние подпятники 8 опор гидроцилиндров. Перемещение стопорных гаек 16 по резьбе 15 щтоков 14 осуществляется их индивидуальными механизмами перемещения. После подхода стопорных гаек 16 ,в рабочее положение, т. е. после контакта с подпятниками 8, вес корпуса 2 платформы через
5
0
5
0
подпятник 8, вогнутые верхние торцы этих гаек 16 и их резьбу 15 передается на штоки 14 гидроцилиндров 6 посредством резьбы 15 и далее через захваты 23 и рейки 5 опорной колонны 4 на донный грунт.
В этом состоянии платформы гидроцилиндры 6 находятся в контакте с их опорами с помощью одновременно двух сферических опорных поверхностей 10 и -11. При этом с корпусами гидроцилиндров 6 через их пяты 13 контактируют подпятники 7 по внутренним поверхностям 10; со штоками гидроцилиндров 6 через сопряженные с ними по резьбам 15 стопорные гайки 16 контактируют подпятники 8 по наружным поверхностям 11.
Указанная система опирания корпуса 2 платформы на элементы гидроцилиндров 6 обеспечивает практически полную их разгрузку от силовых воздействий, вызванных упругими перемещениями порталов 1 в любом направлении в результате действия на них внешних нагрузок в рабочем состоянии платформы.
По окончании строительных работ, выполненных с одной рабочей установки платформы, производится ее спуск на воду, для чего стопорные устройства переводятся с помощью их механизмов перемещения в исходное положение (изображено пунктиром на фиг. 1), корпус 2 платформы опускается на поверхность воды с помощью того же гидравлического подъемного устройства по схеме, аналогичной описанной выше, и производится подъем опорных колонн 4. В этом режиме работы устройства нагрузки от веса колонн 4 и сил сопротивления извлечению их из грунта воспринимаются щтоками 14 гидроцилиндров одной из групп, совершающей в данный момент рабочий ход, и передаются корпусам гидроцилиндров этой же группы, а через них и пяты 13 - на нижние сферические подпятники 9. Силовая связь между штоками 14 и корпусами гидроцилиндров 6 осушествляется давлением рабочей жидкости в штоковых полостях гидроцилиндров 6. Сферическая форма опорных поверхностей средних подпятников 9 исключает заклинивание подвижных элементов гидроцилиндров 6 в результате упругих перемешений опорной колонны 4, возникающих в процессе их извлечения из грунта.
//-/)
Ж
cpus.Z
12
21
22
24.
20
(с/еЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Плавучая платформа | 1981 |
|
SU988971A1 |
| УСТАНОВКА ДЛЯ ПРИЕМА, СКЛАДИРОВАНИЯ И ВЫДАЧИ СКВАЖИННЫХ ТРУБ И ШТАНГ ПРИ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЯХ | 1998 |
|
RU2137897C1 |
| Устройство для подъема затонувших объектов | 1982 |
|
SU1066890A1 |
| Подъемное устройство для плавучих буровых установок | 1977 |
|
SU866111A1 |
| ВЕРТИКАЛЬНЫЙ СУДОПОДЪЕМНИКI т" '^Wirr -.9I ^..,;,.; 1..U... ..ISEHDAIiJ'icKA | 1965 |
|
SU172685A1 |
| Буровая установка | 1981 |
|
SU1016474A1 |
| Шагающий движитель | 1978 |
|
SU823212A1 |
| ИНСТРУМЕНТ ДЛЯ СПУСКА И ПОДЪЕМА ПОДВОДНОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2752537C1 |
| Гидравлическое подъемное устройство для амоподъемных плавучих буровых установок | 1973 |
|
SU609863A1 |
| Монтажная платформа для сборки и разборки опорных колонн плавучих буровых установок | 1982 |
|
SU1038466A1 |

| Агагусейнов Ю | |||
| А | |||
| и др | |||
| Самоподъемные плавучие буровые установки | |||
| М.: Недра, 1979, с | |||
| Счетная таблица | 1919 |
|
SU104A1 |
