xeCTKOCtb эквивалентногс бруса
H-E-d
-- -г- .
32 D I (2-f/ )) жесткость эквивалентного бруса
А
Н -Е;d В
.(
1 -f |л2 CJ- +f) s nV /и-коэффициент Пуассона; -- угол, образуемый продольной осью винтового пружинного токоподвода в исходном и отклоненном на угол «положении чувствительного элемента,
(R + l) -gcose
/8-aretg
Ff
Изобретение относится к точному приборостроению и может найти применение в гироскопических приборах и акселерометрах для ииерциальных систем.
Цель изобретения - уменьшение моментов тяжеиия узла.
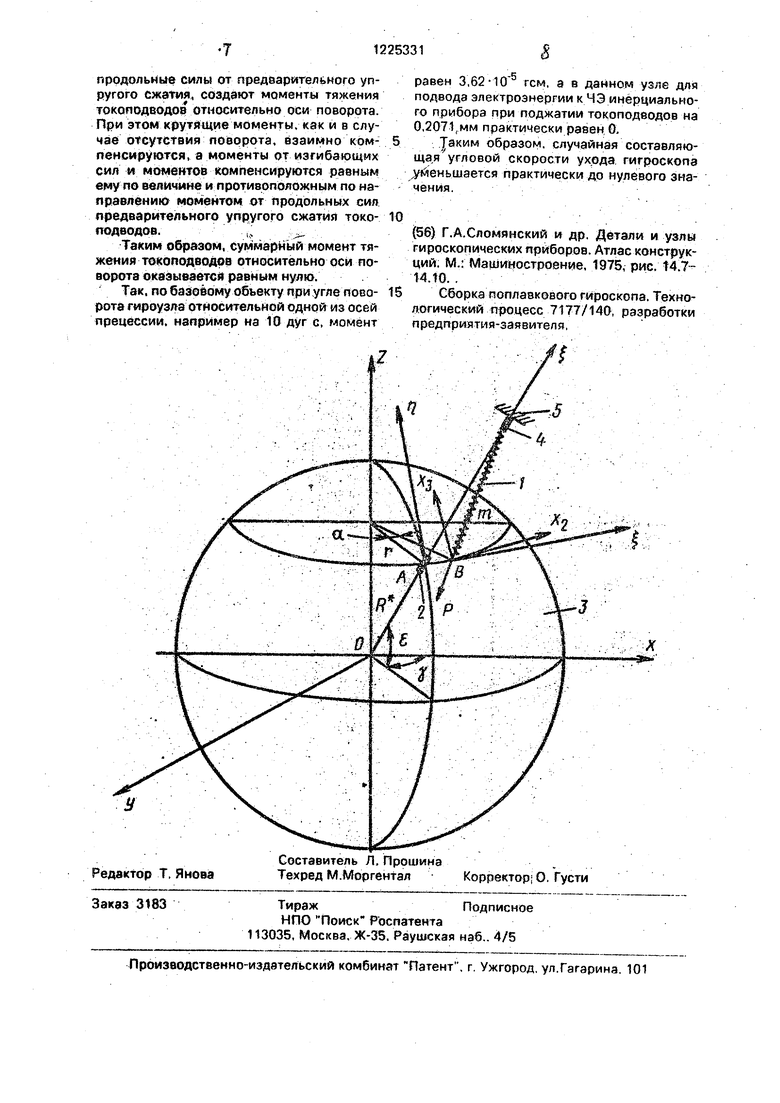
На чертеже представлен узел для подвода электроэнергии к чувствительному элементу инерциального прибора.
Узел для подвода электроэнергии к чувствительному элементу (ЧЭ) инерциаль-ного прибора содержит винтовые пружинные то- коподводы 1, один из концов каждого из которых через гермоввод 2 закреплен на ЧЭ 3, а второй, через гермоввод 4 - на корпусе 5 инерциального прибора. Токоподводы 1 размещены симметрично относительно осей поворота X, Y, Z инерциального прибора, причем каждый винтовой пружинный то- коподвод 1 установлен с предварительной упругой деформацией сжатия вдоль его оси, а отношение величины упругой деформации к приведенному радиусу R равно
Я . Х -я:-Р - ГВ 2 Т 4(R -l-.O-B-cosp С
С
,2
... ., 7
/Ноо
4 -prsin /) 4-COS р
где R R + I;
R - радиус ЧЭ:
I - длина гермоввода;
D диаметр винтового пружинного токоподвода 1;
i - число рабочих витков винтового пружинного токоподвода 1;
р - угол подьема винтовой линии винтового пружинного токоподвода 1:
В - жесткость проволоки винтового пружинного токоподвода 1 на изгиб. В Е1ь;
С - жесткость проволоки винтового пружинного токоподвода т на кручение, С Glp,Ё, G - модули упругости, соответственно, I и Ц рода, материала проволоки винтового пружинного ТОКОПОДБОДЭ 1;
1ь - момент инерции сечения проволоки винтового пружинного токоподвода 1 отноЯ с
ситеяьно бинормали, 1ь :
Ь4
IP - полярный момент инерции сечения проволоки винтового пружинного токопод, . п-( вода 1, 1р ,
d - диаметр проволоки винтового пружинного токоподвода:
Xi - сила предварительного упругого сжатия винтового пружинного токоподвода,
.. с Х2-( ,
(R-flM
Х2, Хз - соответственно изгибающая си- ла и изгибающий момент в точке крепления винтового пружинного токоподвода 1 на ЧЭ 3. расположенного под углом к экваториальной плоскости ЧЭ 3; Х2 и Хз определяются из системы уравнений
rR + 1У«-СО Г - - - з-Н . Х2-Н.
гv -г i; ы -иъ f--- -г --- ,
ч5Аизг, АСДВ
20
a-cos.- 2А„зг
Хз-Н
где а- угол поворота ЧЭ;
Н - длина рабочей части винтового пружинного токоподвода 1;
АИЭГ - жесткость эквивалентного бруса на изгиб,
д H-E-d
АИЗГг ,
32-D-i(2+/rCOS p)
АСДВ - жесткость эквивалентного бруса на сдвиг.
35 -H-E-d
АСДВ ./г - коэффициент Пуассона; 40 уЗ - угол, образуемый продольной оСью винтового пружинного токоподвода 1 в исходном и отклоненном на угол а положении ЧЭЗ,
5 / arctgC -)-.
Работа устройства заключается в следующем.
При отсутствии поворота гироузлаотносительно какой-либо из осей прецессии проольные силы и крутящие моменты в
заделках токоподводов на гироузле, розникающие от предварительного упругого
сжатия токоподводов, взаимно компенсируются.
При повороте гироузла относительно оси прецессии в заделках токоподйодов на гироузле дополнительно возникают изгибающие силы и изгибающие моменты. Указанные реакции в заделках, включая также
продольные силы от предбарител ного упругого сжатия, создают моменты тяжения ТОКОПОДВОД09 относительно оси поворота. При этом крутящие моменты, как и в случае отсутствия поворота, взаимно компенсируются, а моменты от изгибающих сил и моментов компенсируются равным ему по величине и противоположным по направлению моментом от продольных сил предварительного упругого сжатия тохо- подводов.I,
Таким образом, суммарный момент тя- жения токоподвсздрв относительно оси поворота оказыеаетсй равным нулю.
Так. по базовому объекту приугле поворота гироузл а относительной одной из осей прецессии, например на 10 дуг с, момент
равен 3,62-10 гсм, а в данном узле для подвода электроэнергии к ЧЭ инёрциально- го прибора при поджатии токоподеодов на 0,2071,мм практически равен, ОТаким образом, случайная составляю- ща,я угловой скорости ухрда гигроскопа д йеньшается практически до нулевого значения.
10
(56) Г.А.Сломянский и др. Детали и узлы гироскопических приборов. Атлас конструкций. М.: Машиностроение, 1975, рис. t4.7- 14.10. .
16 Сборка поплавкового гироскопа. Технологический процесс 7177/140, разработки предприятия-заявителя,
Редактор Т. Я нова
Составитель Л. Прошина Техред М.МоргенТал
Заказ 3183
ТиражПодписное
НПО Поиск Роспатента 113035. Москва. Ж-35. Раушская наб.. 4/5
Производственно-издательский комбинат Патент, г. Ужгород. ул.Гагарина. 101
Корректор- О. Густи
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОП | 2011 |
|
RU2462761C1 |
| УЧЕБНЫЙ ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ГИРОСКОПИЧЕСКОГО ЭФФЕКТА | 1992 |
|
RU2028011C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
| Способ динамичной высокоточной ориентации и стабилизации космического аппарата | 2018 |
|
RU2702932C1 |

| Г.А.Сломянский и др | |||
| Детали и узлы гироскопических приборов | |||
| Атлас конструкций | |||
| М,: Машииостроен1/18, 1975 | |||
| рис | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ | 1921 |
|
SU7177A1 |
