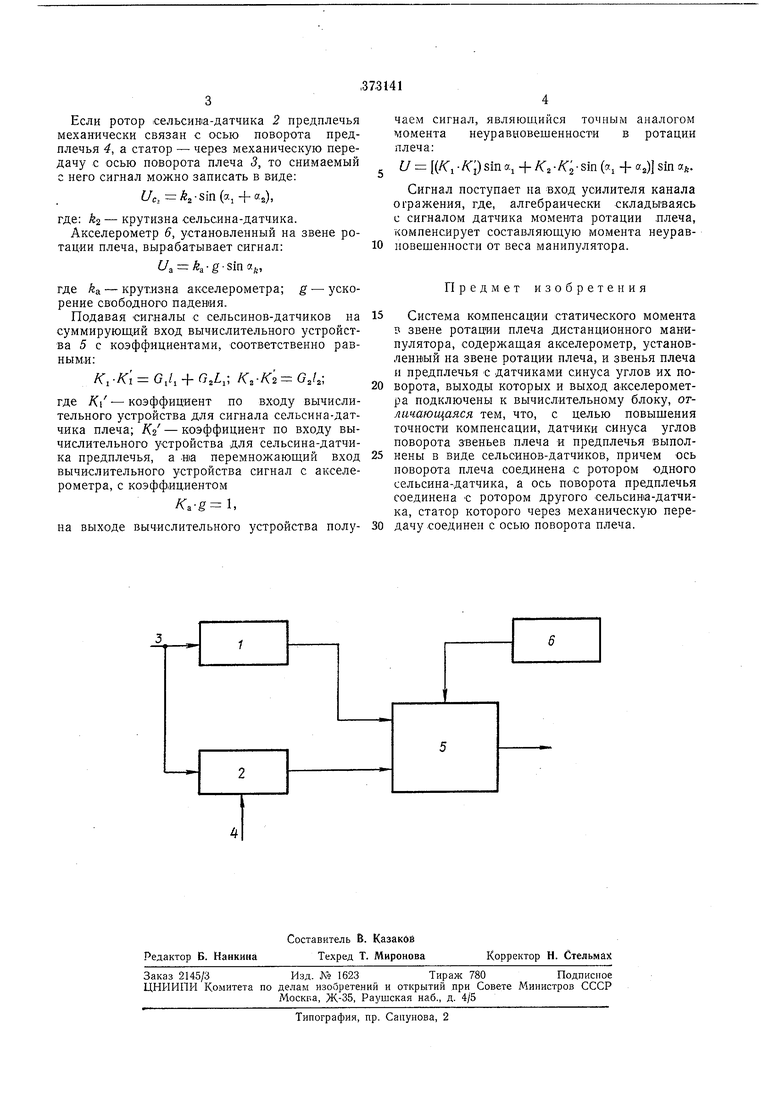
Изобретение относится к области автоматического управления н предназначено для использования в системах управления манипуляторами, установленными на транспортных средствах. Известны .системы компенсации статического момента в звене ротации плеча дистанциониого манипулятора, содержащие акселерометр, установленный на звене ротации плеча, и звенья плеча и предплечья с датчиками синуса углов их поворота, выходы которых и выход акселерометра подключены к -вычислительному блоку. Недостатком этих систем является низкая точность компенсации статического момента в звене ротация плеча. Отличие описываемой системы состоит в том, что датчики синуса углов поворота звеньев плеча и предплечья выполнены в виде сельсинов-датчиков, причем ось поворота плеча соединена с ротором одного сельсина-датчика, а ось поворота .предплечья соединена с ротором другого сельсина-датчика, статор которого через механическую передачу соединен с осью поворота плеча. Это позволяет повысить точность компенсации. На чертеже показана функциональная схема описываемой системы, которая содержит сельсин-датчик / плеча, сельсин-датчик 2 пред(тлечья, ось поворота плеча 3, ось поворота предплечья 4, вычислительный блок 5 и акселерометр 6. Устройство работает следующим образом. При крене ,и дифференте основания манипулятора в звене ротации плеча возникает молмент неуравновещенности, который описывается выражением: (GA + G,L,) sin а, + G,l, sin (a, -f + «2)}-sin aft, где Mpn - момент неуравнювещенности в звене ротации .плеча; «А - угол крена манипуля-) тора; /1 - расстояние от оси вращения плеча; до центра тяжести плеча; /2 - расстояние от оси вращения предплечья до центра тяжести предплечья; /г - общая длина плечевого звена; GI - вес плечевого звена; GZ - вес предплечья; tti и as - относительные углы .поворота плеча и предплечья. Для нормальной работы манипулятора необходимо скомпенсировать составляющую этого момента от сил веса конструкции манипулятора. Сигнал компенсации вырабатывается следующим образом. Сигнал, снимаемый с сельсина-датчика /, установленного на оси поворота плеча 5, описывается выражением: и с, k,-sina,, где ki - крутизна сельсина-датчика. Если ротор сельсииа-датчика 2 предплечья механически связан с осью поворота предплечья 4, а статор - через механическую передачу с осью поворота плеча 3, то снимаемый с него сигнал можно записать в виде: (Ус, - 2-sin (-., +«г), где: kz - крутизна сельснна-датч,ика. Акселерометр 6, установленный на звене ротации плеча, вырабатывает сигнал: U sin а, где йа - крутизна акселерометра; g - ускорение свободного падения. Подавая сигналы с сельсинов-датчиков на суммирующий вход вычислительного устройства 5 с коэффициентами, соответственно равны м.и: K,-Ki G,l, + 0,L,; K,, К.1 - коэффициент по входу вычислительного устройства для сигнала сельсина-датчика плеча; Кч - коэффициент по входу вычислительного устройства для сельсина-датчика предплечья, а «а перемножающий вход вычислительного устройства сигнал с акселерометра, с коэффициентом К,-ё, на выходе вычислительного устройства получаем сигнал, являющийся точным аналогом момента неуравновешенности в ротации плеча: и - (.j + АГг-К sin (а, -f а) Sin а. Сигнал поступает на вход усилителя канала отражения, где, алгебраически складываясь с сигналом датчика момента ротации .плеча, компенсирует составляющую момента неуравновешенности от веса манипулятора. Предмет изобретения Система компенсации статического момента в звене ротации плеча дистанционного манипулятора, содержащая акселерометр, установленный на звене ротации плеча, и звенья плеча и предплечья с датчиками синуса углов их поворота, выходы которых и выход акселерометра подключены к вычислительному блоку, отличающаяся тем, что, с целью повышения точности компенсации, датчики синуса углов поворота звеньев плеча и предплечья выполнены в виде сельсинов-датчиков, причем ось поворота плеча соединена с ротором одного сельсина-датчика, а ось поворота предплечья соединена € ротором другого сельсина-датчика, статор которого через механическую передачу .соединен с осью поворота плеча.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОМПЕНСАЦИИ СТАТИЧЕСКОГО МОМЕНТА В ЗВЕНЕ РОТАЦИИ ПЛЕЧА ДИСТАНЦИОННОГО МАНИПУЛЯТОРА | 1973 |
|
SU381501A1 |
| Устройство компенсации статических моментов | 1975 |
|
SU561657A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU448950A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1226406A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
| ДИСТАНЦИОННЫЙ КОНИРУЮ(ЦИЙ МАНИНУЛЯТОР | 1972 |
|
SU330950A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
