1
Изобретение относится к области машиностроения, а именно к дистанционным копирующим манипуляторам.
Известно устройство ко.мпенсации статических моментов дистанционного копирующего манипулятора, в котором статические моменты последовательно соединенных цилиндрическими шарнирами звеньев предплечья и плеча компенсируются сигнала ми управления приводами, подаваемыми акселерометрами
LI.
Недостатком указанного устройства является низкая точность компенсации статических моментов в манипуляторах, плоскость звеньев которых имеет отклонение от вертикальной плоскости, что ограничивает диапазон углов поворота звеньев манипулятора.
Наиболее близким техническим решением к предлагаемому изобретению является устройство компенсации очувствленного дистанционного копирующего манипулятора, в котором компенсации статических моментов звеньев, плоскость которых имеет отклонение от вертикальной плоскости, производятся с помощью синусно-косинусных вращающихся трансформаторов и потенциометрических акселерометров. На крестовине кардана установлеиы два потенциометрических акселероМетра, а на звене плеча устаиовлены два синусно-коси«усных вращающихся трансформатора, ориентированных по звеньям и кинематически с ними связанных 2.
Недостаток указанного устройства заключается в сложности конструкции вследствие кинематической связи синусно-косинусных трансформаторовсо звеном предплечья и с крестовиной кардана и в низкой точности компенсации статических моментов.
Целью изобретения является упрощение
конструкции и повышение точности компенсации статических моментов при отклонении плоскости качания звеньев от вертикальной плоскости. Указанная цель достигается тем, что один
из акселерометров установлен )ia корпусе, а его ось чувствительности размещена параллельно одной из осей карданного шарнира; три акселерометра - на плече, ось чувствительности первого из которых параллельна
второй оси карданного шарнира, второго перпендикулярна плоскости, проходящей через оси плеча и карданного шарнира, а третьего параллельна оси плеча; два акселерометра установлены на предплечий, ось чувствительности одного из которых перпендикулярна
плоскости, проходящей через оси звена и
шарнира предплечья, а другого параллельна
оси предплечья.
Такое выполнение устройства компенсации
обеспечивает введение в вычислительное VCTройство формирующих сигналов, пропорциональных статическим моментам в степенях подвижности манипулятора, что упрощает конструкцию и позволяет увеличить обслуживаемое пространство путем повышения точности компенсации статических моментов при отклонении плоскости качания звеньев от вертикальной плоскости.
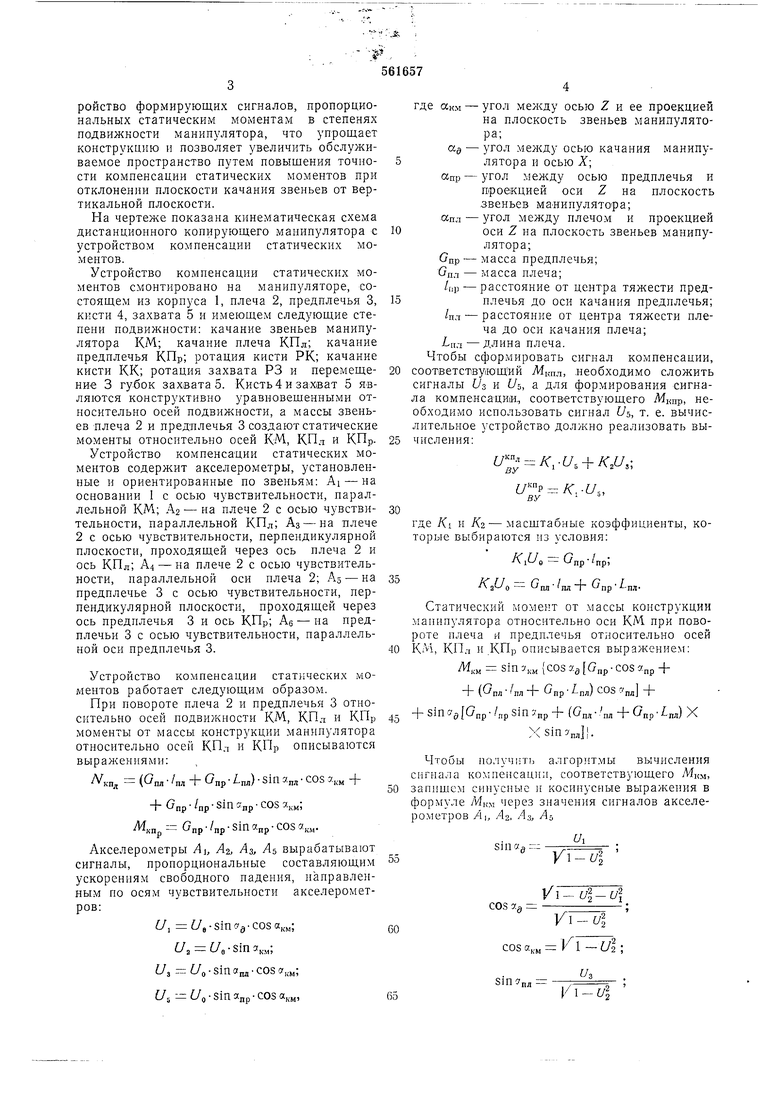
На чертеже показана кинематическая схема дистанционного копирующего манипулятора с устройством компенсации статических моментов.
Устройство компенсации статических моментов смонтировано на манипуляторе, состоящем из корпуса 1, плеча 2, предплечья 3, кисти 4, захвата 5 и имеющем следующие степени подвижности: качание звеньев манипулятора КМ; качание плеча КПд; качание предплечья КПр; ротация кисти РК; качание кисти КК; ротация захвата РЗ и перемещение 3 губок захвата 5. Кисть4 и зах1ват 5 являются конструктивно уравновешенными относительно осей подвижности, а массы звеньев плеча 2 и предплечья 3 создают статические моменты относительно осей КМ, КПд и КПр.
Устройство компенсации статических моментов содержит акселерометры, установленные и ориентированные по звеньям: AI - на основании 1 с осью чувствительности, параллельной КМ; А2 - на плече 2 с осью чувствительности, параллельной КПд; АЗ - на плече 2 с осью чувствительности, перпендикулярной плоскости, проходящей через ось плеча 2 и ось КПл; А4 - на плече 2 с осью чувствительности, параллельной оси плеча 2; АЗ - иа предплечье 3 с осью чувствительности, перпендикулярной плоскости, проходящей через ось предплечья 3 и ось КПр; Ад - на предплечьи 3 с осью чувствительности, параллельной оси предплечья 3.
Устройство компенсации статических моментов работает следующим образом.
При повороте плеча 2 и предплечья 3 относительно осей подвижности КМ, КПд и КПр моменты от массы конструкции манипулятора относительно осей КПл и КПр описываются выражениями:
, (Опл /пл + Gnp /-пл) sin Япл. cos а,;„ +
+ Зпр-/пр-81пс;„р-СОЗя,.„; Gnp /пр sin «пр COS а„„.
Акселерометры Ль Л, АЗ, А вырабатывают сигналы, пропорциональные составляющим ускорениям свободного падения, направленным по осям чувствительности акселерометров:
и, Ua-smyg-cosa,,;
t/2 :f e-Sina.,,,; U,fJa- Sin «пл cos a..; t/5 - iyoSinanp-COSa M,
где ак.м - угол между осью Z и ее проекцией на плоскость звеньев манипулятора;
ctg - угол между осью качания манипулятора и осью X;
«пр - угол между осью предплечья и проекцией оси Z на плоскость звеньев манипулятора; «пл - угол между плечом и проекцией оси Z на плоскость звеньев манипулятора;
СПР - масса предплечья; Опл - масса плеча;
/пр - расстояние от центра тяжести предплечья до оси качания предплечья; /пл - расстояние от центра тяжести плеча до оси качания плеча; Ьпл - длина плеча.
Чтобы сформировать сигнал компенсации, соответствующ ий -Мкпл, .необходимо сложить сигналы Us и f/5, а для формирования сигнала компенсаций, соответствующего Мкпр, необходимо использовать сигнал 1/5, т. е. вычислительное устройство должно реализовать вычисления:
Ul K,-U, + K.U,,-u,,
где Ki и Kz - масштабные коэффициенты, которые выбираются из условия:
Л-.У („
пр пр
Л ,0 Gr
.+ G
пр -плСтатический момент от массы конструкции манипулятора относительно оси КМ при повороте плеча и предплечья относительно осей КМ, КПл и КПр описывается выражением:
М,;„ Sin7™{cOSag Gnp-COSanp
+
+ (Опл /пл
+ Спр-1пл)с05:пл +
+ Sin5ef np--npSin
пр Г (Спл пл г -пр ) X
N/ о I п 7 I , ЫИ
Чтобы получить алгоритмы вычисления сигнала компенсаци:, соответствующего M,oi, запишем синусные и косинусные выражения в формуле Мкм через значения сигналов акселерометров At, AZ. АЗ, Аи,
.
COS э:
v
Vl;
COS а..
f/..
t/1 -1/
Yi-ul-ul
cos a
Vi-ul
- -7T%
/l-4-t/l
COS ЯПР 1
Kl-
Тогда алгоритм вычисления сигнала компенсации, соответствующего Мкм, имеет вид:
.K(u,.(j,+Yi-ul-ulx
1-0
X Ki -ul-ul) + к:, (u,-u, + + Vi - ul ul).
Этот алгоритм позволяет вычислять значения компенсирующего сигнала в пределах углов акм, «кпл, сскпр от О до л/2.
При выполнении манипулятором типовых рабочих операций (например, подъем и перенос груза) угол «км обычно не превышает значения я/2, угол «кпл превыплает значение я/2 только при наличии угла дифферента, а угол «пр может принимать значения большие я/2 независимо от угла дифферента.
Приведенный выше алгоритм вычисления компенсирующего сигнала, соответствующего Мкм, при значениях углов осдл и дает неверный результат вследствие того, что формулы
Yi-ui ui
cos а„л
COS ЯПР
КГ
Ul
используемые в указанном алгоритме, справедливы только для диапазона углов я/2, так как при углах я/2 косинусы должны иметь отрицательные значения, а приведенные формулы соответствуют только положительным значениям косинусов.
Поэтому для расширения зоны обслуживания манипулятора на плече и предплечье установлены два дополнительных акселерометра, которые вырабатывают сигналы:
cos Япд. cos 2j.; COS а„р COS Якм.
Откуда
и.
COS апл -
и.
кг
Эти выражения позволяют определять значения косинусов в диапазоне углов сспл и апр от О до я.
Алгоритм вычисления сигнала компенсации, соответствующего Мкм, при использовании двух дополнительных акселерометров имеет вид:
t/2
г/км
к,(и,.и,+
и ау -
ui
+ Vi-ul-ul-u,} + к, (U,.u, +
+ y -ul-ul.u.
Формула изобретення
Устройство компенсации статических моментов, например, дистанционного копирующего манипулятора, содерлсащее корпус и последовательно соединенные цилиндрическими шарнирами звенья предплечья и плеча, связанные с корпусом карданным шарниром и снабженные ориентированными по звеньям акселерометрами, соединенными с системой управления, отличающееся тем, что, с
целью повышения точности компенсации моментов, один из акселерометров установлен на корпусе, а его ось чувствительности размещена параллельно одной из осей карданного шарнира, три акселерометра - на плече, ось
чувствительности первого из которых параллельна второй оси карданного шарнира, второго перпендикулярна плоскости, проходящей через оси плеча и карданного шарнира, а третьего параллельна оси плеча, два акселерометра установлены на предплечьи, ось чувствительности одного из которых перпендикулярна плоскости, проходящей через оси звена и шарнира предплечья, а другого параллельна оси предплечья.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №330950, кл. В 23J 3/04, 1970.
2. Авторское свидетельство СССР №448950, кл. В 25J 3/04, 1973.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1984 |
|
SU1226406A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU448950A1 |
| СИСТЕМА КОМПЕНСАЦИИ СТАТИЧЕСКОГО МОМЕНТА В ЗВЕНЕ РОТАЦИИ ПЛЕЧА ДИСТАНЦИОННОГО МАНИПУЛЯТОРА | 1973 |
|
SU381501A1 |
| СИСТЕМА КОМПЕНСАЦИИ СТАТИЧЕСКОГО МОМЕНТА | 1973 |
|
SU373141A1 |
| Задающий орган манипулятора | 1979 |
|
SU895639A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| ДИСТАНЦИОННЫЙ КОНИРУЮ(ЦИЙ МАНИНУЛЯТОР | 1972 |
|
SU330950A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU560746A2 |
| Задающий орган манипулятора | 1976 |
|
SU564150A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |

