(54) УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ СТАТИЧЕСКИХ МОМЕНТОВ
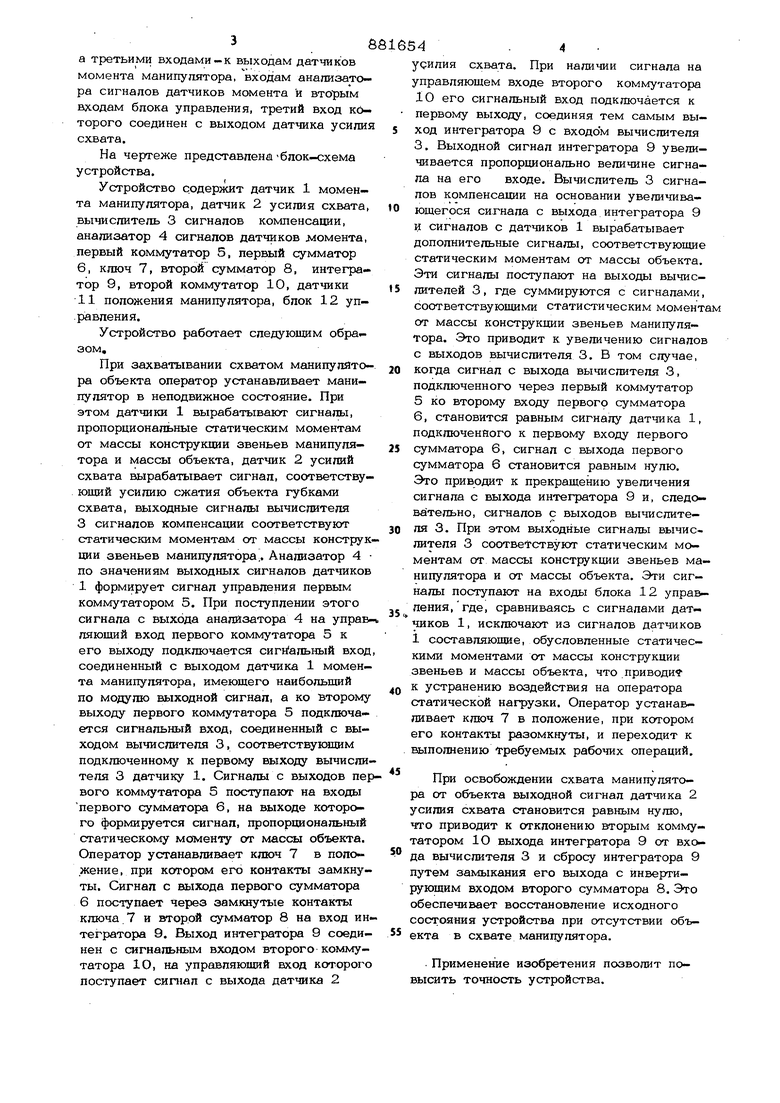
МАНИПУЛЯТОРА Изобретение относится к робототехни-, кё и может быть использовано в дистанционных манипуляторах, управляемых оператором. Известны устройства для компенсации статических моментов манипулятора, содержапие перекрестные каналы отражения нагрузки, связывающие датчики моментов уравновешенных звеньев через блоки сравнения сигналов с приемниками моментов неуравновешенных звеньев f 1 J. Однако данное устройство имеет низкую точность компенсации статических мо ментов, поскольку устройство не позволяет полностью исключить из сигналов, поступаюших на приемники моментов, составляющие, обусловленные статическими мсяиентами, а обеспечивает лишь уменьше ние разброса этих сигналов. Наиболее близким техническим решением к изобретению является устройство, содержащее датчик усилия схвата, датчики момента манипулятора управления и датчики положения манипутгатора, подключенные своими выходами к первым входам вычислителя сигналов компенсаш1и и блока управления L2 J Недостатком этого устройства являртся низкая точность компенсации статических моментов от массы объектов, расположенных в схвате манипулятора. Целью изобретения является повышение точности устройства. Указанная -цель достигается тем, что устройство для компенсации статических моментов манипулятора содержит последовательно соединенные анализатор сигналов датчиков момента, первый коммутатор, первый сумматор, ключ, второй сумматор, интегратор и второй коммутатор, второй вход которого подключен к выходу датчика усилия схвата, первый выход - ко второму входу второго сумматора, а второй - ко второму входу вычислителя сигналов компенсации, выходы которого соединены со вторыми входами первого коммутатора, подключенного вторым выходом ко BTOpc iy входу первого сумматора, а третьими входами-к выходам датчиков момента манипушггора, входам анализатора сигналов датчиков момента и вторым входам блока управления, третий вход которого соединен с выходом датчика усилия охвата. На чертеже представлена-блок-схема устройства. Устройство содержит датчик 1 момента манипулятора, датчик 2 усилия схвата, вычислитель 3 сигналов компенсации, анализатор 4 сигналов датчиков момента, первый коммутатор 5, первый сумматор 6, ключ 7, второй сумматор 8, интегратор 9, второй коммутатор 10, датчики 11 положения манипулятора, блок 12 управления. Устройство работает следующим образом. При захватывании схватом манипулятоpa объекта оператор устанавливает манипулятор в неподвижное состояние. При этом датчики 1 вырабатывают сигналы, пропорциональные статическим моментам от массы конструкции звеньев манипулятора и массы объекта, датчик 2 усилий схвата вырабатывает сигнал, соответствующий усилию сжатия объекта губками схвата, выходные сигналы вычислителя 3 сигналов компенса1щи соответствуют статическим моментам от массы конструк ции звеньев манипулятора,. Анализатор 4 по значениям выходных сигналов датчиков 1 формирует сигнал управления первым коммутатором 5. При поступлении этого сигнала с выхода анализатора 4 на управ ляющий вход первого коммутатора 5 к его выходу подключается сигнальный вход соединенный с выходом датчика 1 момента манипулятора, имеющего наибольщий по модулю выходной сигнал, а ко второму выходу первого коммутатора 5 подключается сигнальный вход, соединенный с выходом вычислителя 3, соответствующим подключенному к первому выходу вычисли теля 3 датчику 1. Сигналы с выходов пе вого коммутатора 5 поступают на входы первого сумматора 6, на выходе которого формируется сигнал, пропорциональный статическому моменту от массы объекта. Оператор устанавливает ключ 7 в положение, при котором его контакты замкнуты. Сигнал с выхода первого сумматора 6 поступает через замкнутые контакты ключа.7 и второй сумматор 8 на вход ин тегратора 9. Выход интегратора 9 соединей с сигнальным входом второго коммутатора 1О, на управляющий вход которого поступает сипшл с выхода датчика 2 усилия схвата. При наличии сигнала на управляющем входе второго коммутатора 10 его сигнальный вход подключается к первому выходу, соединяя тем самым выход интегратора 9 с входом вычислителя 3. Выходной сигнал интегратора 9 увеличивается пропорционально величине сигнала на его входе. Вычислитель 3 сигналов компенсации на основании увеличивающегося си гнала с выхода интегратора 9 И сигналов с датчиков 1 вырабатывает дополнительные сигналы, соответствующие статическим моментам от массы объекта. Эти сигналы поступают на выходы вычислителей 3, где суммируются с сигналами, соответствующими статистическим моментам от массы конструкции звеньев манипулятора. Это приводит к увеличению сигналов с выходов вычислителя 3. В том случае, когда сигнал с выхода вычислителя 3, подключенного через первый коммутатор 5 ко второму входу первогр сумматора 6, становится равным сигналу датчика 1, подключенного к первому входу первого сумматора 6, сигнал с выхода первого сумматора 6 становится равным нулю. Это приводит к прекращению увеличения сигнала с выхода интегратора 9 и, следовательно, сигналов с выходов вычислителя 3. При этом выходные сигналы вычислителя 3 соответствуют статическим моментам от массы конструкции звеньев манипулятора и от массы объекта. Эти сигналы поступают на входы блока 12 управления,где, сравниваясь с сигналами датчиков 1, исключают из сигналов датчиков 1 составляющие, обусловленные статическими моментами от массы конструкции звеньев и массы объекта, что приводи к устранению воздействия на оператора статической нагрузки. Оператор устанавливает ключ 7 в положение, при котором его контакты разомкнутъ, и переходит к выполнению требуемых рабочих операций. При освобождении схвата манипулятора от объекта выходной сигнал датчика 2 усилия схвата становится равным нулю, что приводит к отклонению вторым коммутатором 1О выхода интегратора 9 от входа вычислителя 3 и сбросу интегратора 9 путем замыкания его выхода с инвертирующим входом второго сумматора 8. Это обеспечивает восстановление исходного состояния устройства при отсутствии объекта в схвате манипулятора. . Применение изобретения позволит повысить точность устройства.
Формула изобретения
Устройство для компенсации статических моментов манипулятора, содержащее датчик усилия схвата, датчики момента
манипулятора и датчики положения манипулятора, подключенные своими выходами к первым входам вычислителя сигналов компенсации и блока управления, от п и - чающееся тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные анализатор сигналов датчиков момента, первый коммутатор, первый сумматор, ключ, второй сумматор, интегратор и второй коммута- тор, второй вход которого подключен к выходу датчика усилия схвата, первый выход - ко второму входу второго сумматора, а второй выход - ко второму входу вычислителя сигналов компенсации, выходы которого соединены со ыорымн входами первого коммутатора, подключенного вторым выходом ко второму входу первого сумматора, а третьими входами - х. выходам датчиков момента манипулятора, входа анализатора сигналов датчиков момента и вторым входам блока управления, третий вход которого соединен с выходом датчика усилия схвата.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство № 415155, кп. В 25 Т 3/04, 1971.
2.Авторское свидетельство СССР № 117687, кл. А 61 F 1/06, 1961 (прототип).
X
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1984 |
|
SU1226406A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления манипулятором | 1987 |
|
SU1565679A1 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Устройство для управления манипулятором | 1982 |
|
SU1041986A1 |
/ ч /
