Изобретение относится к машиностроению и может быть использовано для точных перемещений различных обектов .
Цель изобретения - повышение точ ности перемещений и уменьшение габаритных размеров.
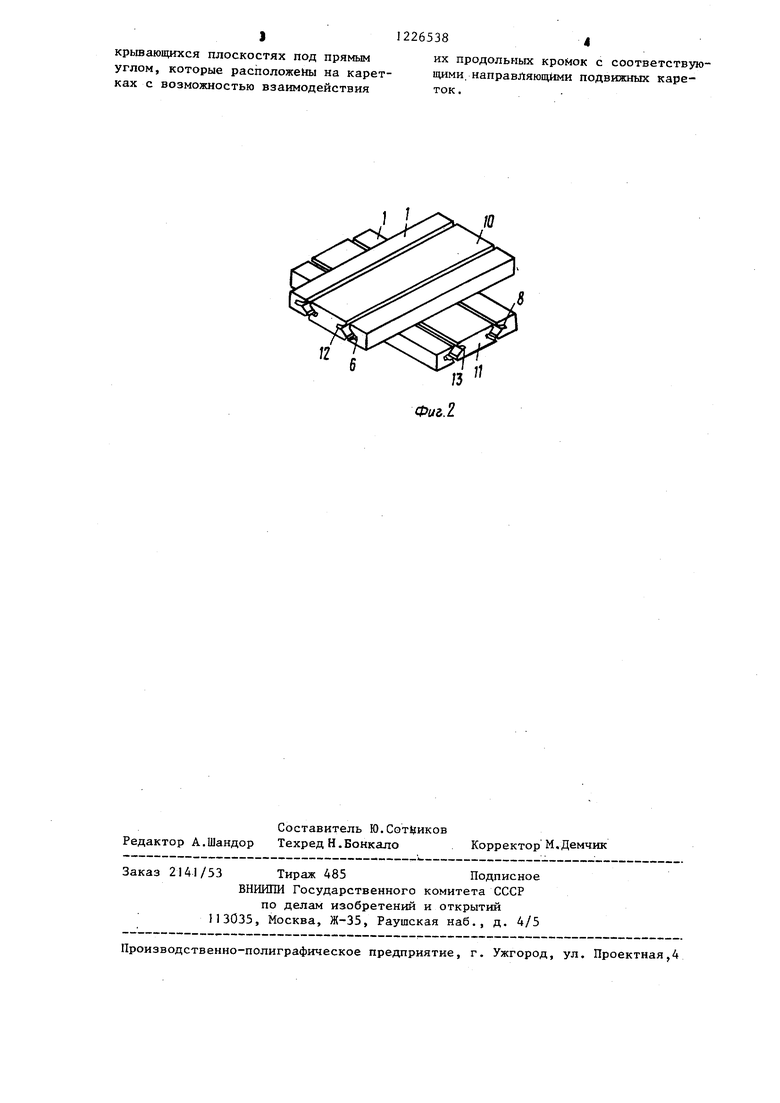
На фиг. 1 изображен двухкоорди- натный стол, общий вид; на фиг. 2 - предметный столик в направляющих подвюкных кареток.
Двухкоординатный стол содержит корпус 1 с взаимно перпендикулярными направляющими 2 и 3, в которых установлены соответственно подвижны каретки 4 и 5. В .каретке: 4 выполнены взаимно перпендикулярные направляющие 6 и 7, а в каретке 5 - взаимно перпендикулярные направляющие 8 и 9. В направляющих 6 каретки 4 и направляющих 8 каретки 5 ус- тановлен предметньш столик, вьтолне ньш в виде двух жестко взаимно перпендикулярно закрепленных одна на другой планок 10 и 11 с выполненными на их продольных сторонах направляющими, соответственно 12 и 13. Каждая из подвижных кареток 4, 5 снабжена установленным на корпусе 1 приводом 14 с винтом 15 на его выходном валу, кинематически соединенным с соответствующей подвижной кареткой.
Все направляющие вьшолнены в виде пар качения (на чертежах шарики и сепараторы условно не показаны). Отношение длины планок 10 и Ii к их ширине составляет не менее 2, что обеспечивает соблюдение необходимого условия достижения плавности ход
Работа двухкоординатного стола происходит следующим образом.
Для обеспечения перемещения предметного столика по оси X включают продольный привод 14, при этом его винт i 5 начинает вращаться и перемещать каретку 4 по направляющим 2 корпуса 1. Одновременно с кареткой 4.перемещается размещенная в ее направляющих 6 планка предметного столика, при этом сама планка 10 остается неподвижной относительно направляющих 6 каретки 4, а жестко соединенная с ней планка 11 предметного столика скользит по направляю- щ:ям 8 каретки 5, в результате чег(:) каретка 5 и поперечный привод 14 остаются неподвижными относительно корпуса 1.
Для обеспечения перемещения предметного столика по оси У включают поперечный привод 14, при этом винт 15 начинает вращаться и перемещать каретку 5 по направляющим 3 корпуса 1. Одновременно с кареткой 5 перемещается размещенная в ее направляющих 8 планка 11 предметного столика и, увлекая за собой жестко соединенную с ней планку 10, обеспечивает перемещение последней относительно направляющих 6 каретки 4, оставаясь сама при этом неподвижкой относительно направляющих 8 кареток 5,
J в результате чего каретка 4 и про- дольньй привод 14 остаются неподвижными относительно корпуса 1,
Для обеспечения перемещения предметного столика по двум координатам
одновременно включают оба привода 14, при этом из кареток 4,5 осуществляет независимо одна от другой те же движения как указано выше, планка 10 перемещается одновременно по двум координатам, а оба привода 14 остаются неподвижными относительно корпуса 1,
Выполнение предметного столика в
виде двух взаимно перпендикулярно установленных друг на друге планок позволяет повысить точность перемещений за счет обеспечения соблюдения условия плавности хода направ- ляющих и уменьшить габариты стола при обеспечении одних и тех же величин линейных перемещений.
40
Формула изобретения
Двух;координатньш стол, содгржа- пщй корпус с взаимно перпендикулярными направляющими, в которых раз- - мещены подвижные каретки, подвижный
предметный столик, установленный в направляющих, жестко закрепленных на ПОДЕ1ИЖНЫХ каретках во взаимно пер- пендикулярных плоскостях, и приводы подвижньпс кареток, закрепленные на
корпусе и кинематически соединенные с пoдв жными каретками, о т л PI - чающийся тем, что, с целью повьшения точности перемещений и уменьшения габаритных размеров, предметньм столик выполнен в виде двух прямоугольных планок, жестко соединенных мехкду собой и расположенных одна на другой в параллельно перекрьшающихся плоскостях под прямым углом, которые расположены на каретках с возможностью взаимодействия
их продольных кромок с соответствующими, направляющими подвижных кареток .
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМ НАПРАВЛЕНИЯМ | 2014 |
|
RU2579781C2 |
| Вайма для сборки каркасной мебели | 1990 |
|
SU1794661A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| МИКРОМАНИПУЛЯТОР | 1967 |
|
SU202678A1 |
| Многопозиционный силовой стол | 1979 |
|
SU802000A1 |
| Устройство для герметизации прямоугольных корпусов полупроводниковых приборов | 1990 |
|
SU1754368A1 |
| Установка для микросварки проволочных проводников | 2021 |
|
RU2759103C1 |
| Устройство для измерения радиуса и угла сопряжения поверхностей деталей | 1981 |
|
SU1221486A1 |
| Устройство для фиксации деталей по продолговатому отверстию | 1983 |
|
SU1281772A1 |
| Накопитель | 1984 |
|
SU1206053A1 |
Изобретение относится к области машиностроения и может быть использовано для точных перемещений различных объектов. Цель изобретения - повышение точности перемещения и уменьшение.габаритных размеров. В каретках 4 и 5 вьшолнены взаимно перпендикулярные направляющие соответственно 6, 7 и 8, 9. В направляющих 6 и 8 кареток 4 и 5 соответственно установлен предметный столик, выпол- ненньй в жестко соединенных и взаимно перпендикулярно расположенных одна на другой планок 10 и 11. На их продольных сторонах вьшол- нены направляющие 12 и 13, Устройство обеспечивает раздельное перемещение предметного столика по осям X и У и перемещение по двум координатам одновременно. Выполнение предметного столика в виде двух взаимно перпендикулярно установленных одна на другой планок обеспечило соблюдение условия плавности хода направляющих, 2 ил. i (Л to tVD Од сл со 00
ю
Фи&.2
| Шарловский Ю.В | |||
| Регулирование устройства приборов и их элементы.- М.: Машиностроение, 1976, с | |||
| Приспособление для выталкивания готовой кипы хлопка-волокна из пресса с ходовой плитой | 1960 |
|
SU134135A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМНАПРАВЛЕНИЯМ | 1969 |
|
SU436394A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
