Изобретение относится к машиностроению, в частности к манипуляторам, и может быть использовано при выполнении загру- зочно-разгрузочных, транспортных и основных технологических операций в электротехнической, радиотехнической и других отраслях промышленности.
Целью изобретения является повышение надежности и долговечности работы модуля манипулятора за счет исключения ударных нагрузок.
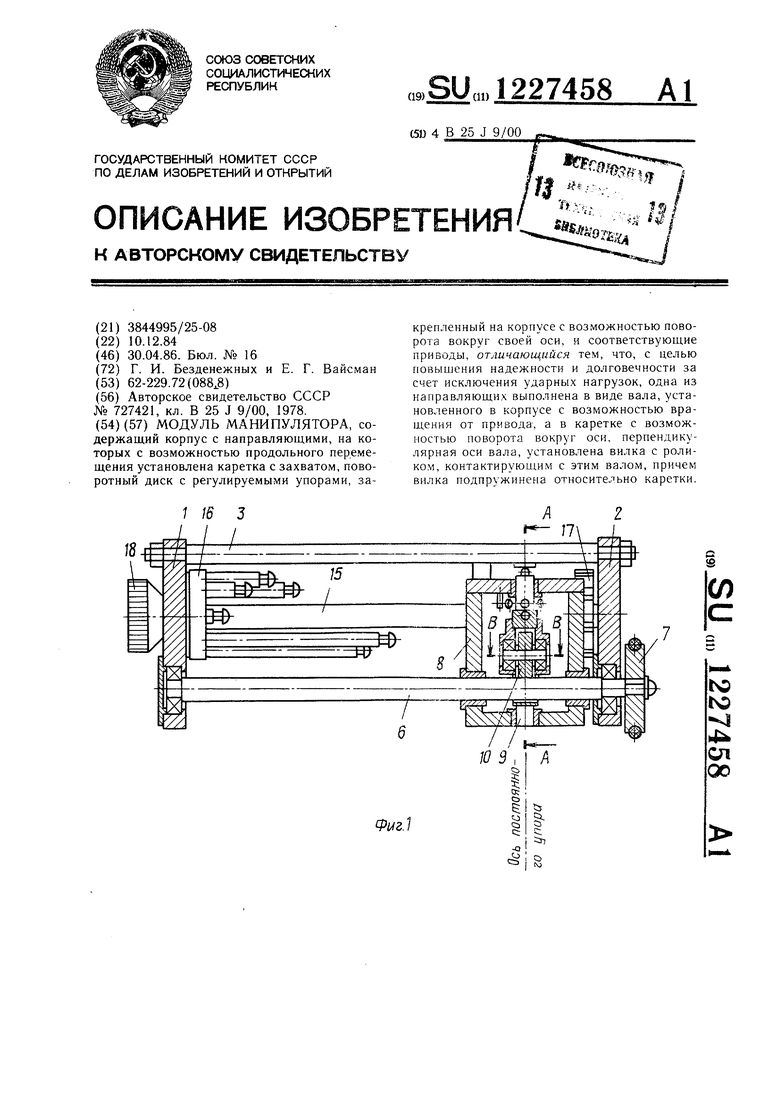
На фиг.1 изображен модуль манипулятора, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез по Б-Б на фиг.2; на фиг.4 - разрез по В-В на фиг.1.
Модуль манипулятора содержит корпус, состояш,ий из двух щек 1 и 2, соединенных стяжками 3,4,5 вала 6, установленного в щеках корпуса с возможностью врапде- ния, на кольце которого закреплен шкив 7 приводов, каретку 8 с вилкой 9, в которой установлен ролик 10, с торцом вилки взаимодействует плоская пружина 11, закрепленная на каретке винтами 12. Вилка 9 установлена в каретке 8 с возможностью поворота вокруг оси, перпендикулярной оси вала 6, и связана с кареткой пружинами 13 через штифт 14. На валу 15 корпуса установлен поворотный диск 16 с регулируемыми упора/ -А
0
ми. На валу 15 закреплены храповое колесо 17 и ручка 18. На вилке 9 закреплен штифт 19, взаимодействующий с регулируемыми упорами. Каретка снабжена также двумя роликами 20, взаимодействуюш,ими со стяжкой 3.
Модуль манипулятора работает следую- пдим образом.
Перемещ.ение каретки 8 обеспечивается механизмом, работающим на принципе фрикционного винта с переменным шагом, что обеспечивается наклоном оси ролика 10 относительно оси вала б.
Движение через ролик 10 передается каретке 8, которая перемещается вдоль вала 6
, и стяжки 3, охваченной двумя роликами 20, которые удерживают каретку 8 от прово- рота вокруг вала 6. Скорость перемещения каретки 8 зависит от угла наклона ролика 10 к оси вала 6. При подходе каретки к упору штифт 19 взаимодействует с ним и
0 уменьшает угол взаимного положения оси ролика 10 к оси вала 6, доводя его до значения, близкого к нулю, при этом каретка 8 плавно устанавливается на упоре. При реверсе вала б усилиями пружин 13 вилка 9 с роликом восстанавливает угловое положение
к оси вала б и каретка 8 перемеш,ается в противоположном направлении.
Б- Б
.З
Ось ролика ФигЧСоставнтель Ю. Вильчинский
Редактор М. КелемешТехред И. ВересКорректор В. Бутяга
Заказ 1993/17Тираж 103JПодписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4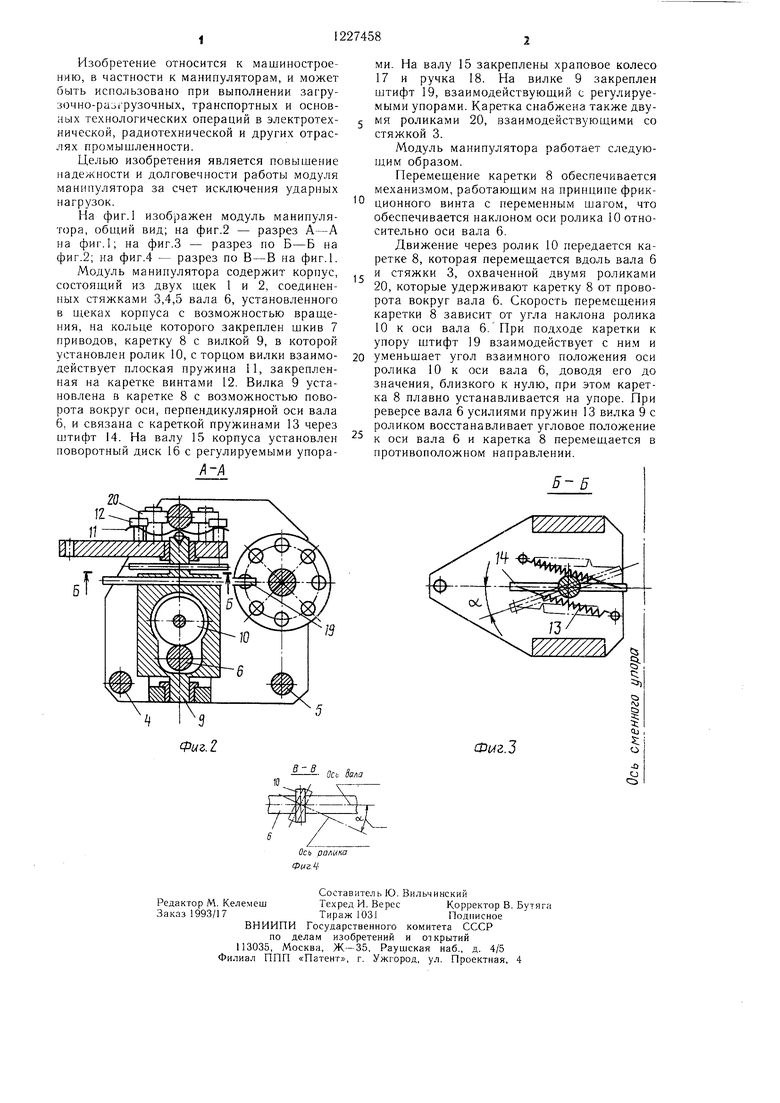
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1986 |
|
SU1364465A2 |
| Устройство для изготовления обрезиненного кордного полотна | 1973 |
|
SU539510A3 |
| Производственный модуль для штамповочных работ | 1988 |
|
SU1685576A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
| Устройство для разделения жил ленточных кабелей | 1987 |
|
SU1603469A2 |
| КРЕСЛО ЛЕТНОГО ЭКИПАЖА С ЧАШКОЙ ПОД ПАРАШЮТ (ВАРИАНТЫ) | 2014 |
|
RU2583102C2 |
| Устройство для монтажа микросхем | 1976 |
|
SU649065A1 |
| Устройство для зарядки кассет на уточно-перемоточных автоматах | 1958 |
|
SU121063A1 |
| АГРЕГАТ ДЛЯ ЗАКАЛКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1972 |
|
SU330203A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| Манипулятор | 1978 |
|
SU727421A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
