со
О 4 4 О5 СП
- и 2
25
2В 21
фиг.г
J 22 2
Го
Изобретение относится к машиностроению, в частности к манипуляторам, может быть использовано при выполнении за- грузочно-разгрузочных, транспортных и основных технологических операций в электротехнической, радиотехнической, часовой и других отраслях промышленности и является усовершенствованием изобретения по авт. св. № 1227458.
Целью изобретения является повышение точности позиционирования и быстродействия за счет уменьшения инерционности системы.
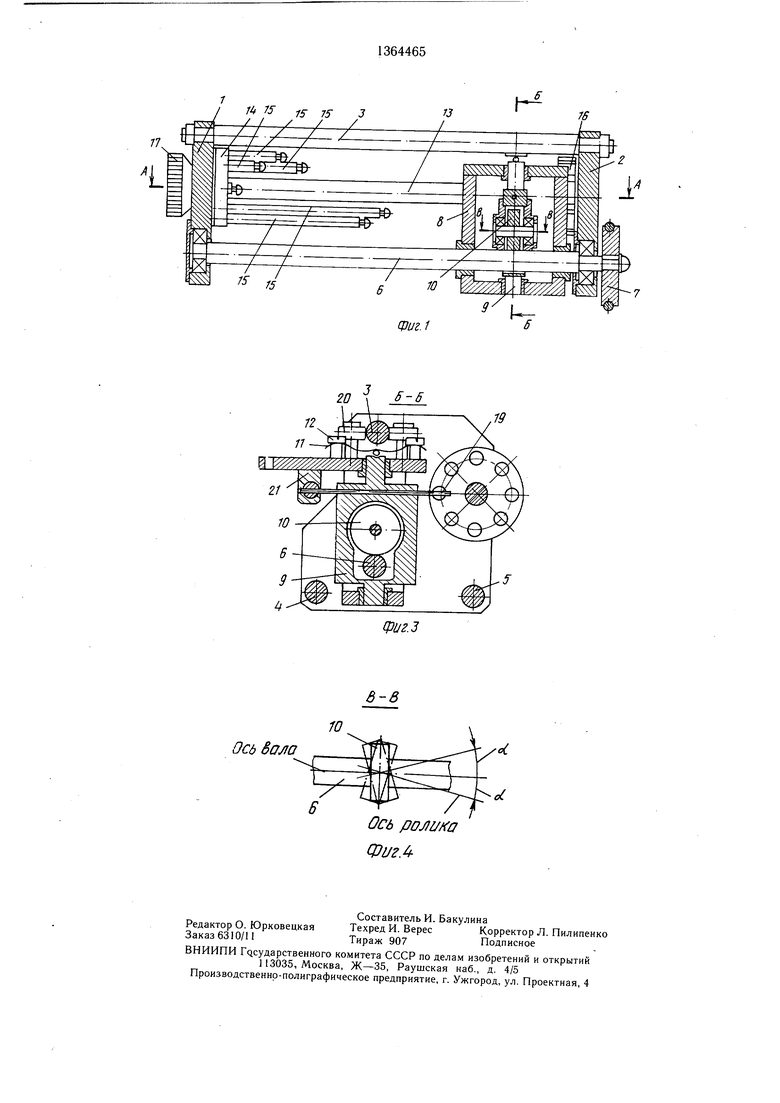
На фиг. 1 изображен модуль манипулятора, обший вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1.
Модуль манипулятора содержит корпус, состояший из двух щек 1 и 2, соединенных стяжками 3-5, вала 6, установленного в ш,еках корпуса с возможностью вра- шения, на конце которого закреплен шкив 7 привода вращения, каретку 8 с рамкой 9, в которой установлен ролик 10, с торцом рамки взаимодействует пружина 11 с регулируемым натяжением винтами 12. На валу 13 корпуса установлен поворотный диск 14 со сменными регулируемыми упорами 15. На валу 13 закреплено храповое колесо 16 и ручка 17. На щеке 2 корпуса установлен постоянный дополнительный упор 18 с возможностью регулирования.
Рамка 9 установлена в каретке 8 с возможностью поворота вокруг оси, перпендикулярной оси вала 6, при этом в рамке закреплен рычаг 19.
Каретка снабжена также двумя роликами 20, взаимодействующими со стяжкой 3, и плунжерным пневмоцилиндром 21 управления двухстороннего действия с плунжером 22, двумя плунжерами 23 и 24, гайками 25 и контргайками 26 с возможностью регулирования длины хода плунжеров.
Рычаг 19 рамки 9 взаимодействует одним концом со сменными и постоянными упорами 15 и 18, а другим концом - с плунжерами 22-24 пневмоцилиндра 21.
Модуль манипулятора работает следующим образом.
Перемещение каретки 8 обеспечивается механизмом, работающим по принципу фрикционного винта с переменным щагом, что
0
5
0
5
0
5
0
5
обеспечивается наклоном оси ролика 10 относительно оси вала 6 в пределах угла а. Движение через ролик 10 передается каретке 8, которая перемещается вдоль вала 6 и стяжки 3, охваченной двумя роликами 20, удерживающими каретку 8 от проворота вокруг вала 6. Скорость перемещения каретки 8 зависит от угла наклона ролика 10 к оси вала 6.
При включенном пневмоцилиндре 21, плунжеры 22 и 24 устанавливают максимальный угол наклона ролика 10, и каретка перемещается; при подходе к упору рычаг 19 взаимодействует с ним и плунжером 24. Усилие перемещения плунжера 24 ввиду его небольшой площади сечения меньше усилия от фрикционного винта, перемещающего каретку, и плунжер 24 утапливается в плунжер 22, конец рычага 19 вступает во взаимодействие с тор.цом окна плунжера 22, усилие перемещения которого ввиду боль- щей площади его поперечного сечения превышает усилие перемещения каретки , и ролик 10 устанавливается на минимальном устойчивом угле, обеспечивая высокую точность позиционирования при выстое. При переключении пневмоцилиндра плунжеры 22 и 23 перебрасывают рычаг 19 на максимальный угол установки ролика, и каретка движется в противоположном направлении до взаимодействия рычага 19 с противоположным упором, повторяя Описанный процесс. Перемещение гаек 25 и контргаек 26 по корпусу пневмоцилиндра меняет хрд плунжера 22, тем самым позволяет регулировать минимально устойчивые углы ролика при высоте на упоре.
i
Формула изобретения
Модуль манипулятора по авт. св. № 1227458, отличающийся тем, что, с целью повышения точности позиционирования и быстродействия за счет уменьшения инерционности системы, он снабжен дополнительным регулируемым упором, закрепленным на корпусе, и плунжерным пневмоцилиндром на каретке, при этом рычаг поворотной рамки одним концом взаимодействует с дополнительным регулируемым упором, а другим концом - с соответствующими плунжерами пневмоцилиндра управления.
/ « 75 /f 75- / / / /
.
/ т / /
1
л
Z-7/J
7S
Ш
жИ
i
gi
ЙХ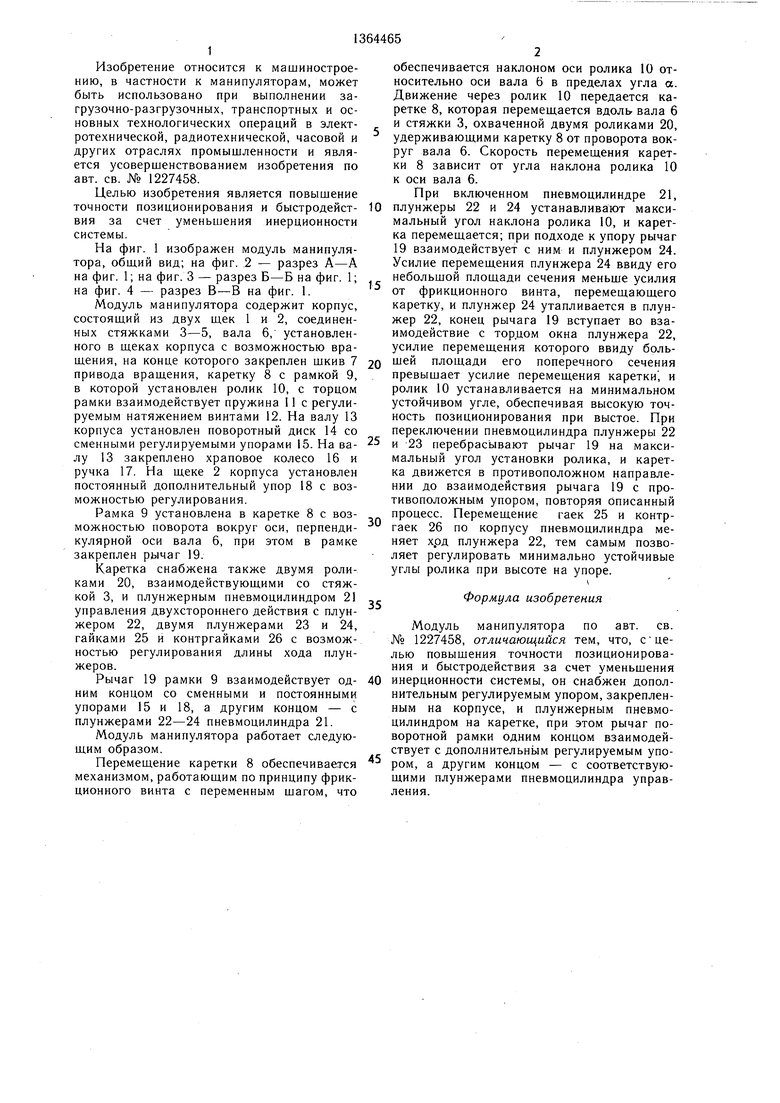
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1984 |
|
SU1227458A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1984 |
|
SU1180226A1 |
| Клепальный пресс | 1980 |
|
SU1016031A1 |
| Манипулятор | 1979 |
|
SU900093A1 |
| Устройство для укладки в тару стержнеобразных предметов | 1982 |
|
SU1076360A1 |
| Полуавтомат герметизации полупроводниковых приборов контактной сваркой | 1988 |
|
SU1590290A2 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ПРОВОЛОЧНЫХ КОНТАКТОВ НА МОНТАЖНЫЕ ПЛАТЫ | 1971 |
|
SU301885A1 |
| Манипулятор к штамповочному прессу | 1990 |
|
SU1787807A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
Изобретение относится к области машиностроения, в частности к манипуляторам, и может быть использовано при выполнении загрузочно-разгрузочных транспортных и основных технологических операций в электротехнической, радиотехнической, часовой и других отраслях промышленности. Целью изобретения является повышение точности позиционирования и быстродейти маулятовыполспортераций ой, чаности. шение родей -А ствия за счет уменьшения . инерционности системы. Для этого на ш.еке 2 корпуса установлен с возможностью регулирования пос- тоя.нный дополнительный упор 18. В каретке 8 установлена рамка с возможностью поворота вокруг оси,перпендикулярной оси вала, на которой закреплен рычаг 19. Каретка 8 снабжена двумя роликами и плунжерным пневмоцилиндром 21 управления двухстороннего действия с плунжером 22, двумя плунжерами 23 и 24, гайками 25 и контргайками 26 с возможностью регулирования длины хода плунжеров. При включенном пневмоцилиндре 21 плунжеры 22 и 24 устанавливают максимальный угол наклона ролика и каретка перемеш,ается. При подходе к упору рычаг 19 взаимодействует с ним и плунжерам 24. 4 ил. (Л
/ / / /
// /
Ocd ёола
7
/
,/
1
j
r/
| Модуль манипулятора | 1984 |
|
SU1227458A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
