(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм позиционирования робота | 1978 |
|
SU774939A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Привод исполнительного органа робота | 1982 |
|
SU1122501A1 |
| Манипулятор | 1985 |
|
SU1276485A1 |
| Манипулятор | 1984 |
|
SU1212779A1 |
| Автоматический манипулятор | 1981 |
|
SU963846A1 |
| Модуль манипулятора | 1991 |
|
SU1799725A1 |
| Манипулятор | 1982 |
|
SU1009754A1 |
| Привод робота | 1979 |
|
SU901675A1 |
| Манипулятор | 1979 |
|
SU770781A1 |
1
Изобретение относится к машиностроению, в частности к промышленным роботам, оснащенным манипуляторами, и может быть применено для автоматизации производстве1гаых процессов в раз};1ичных областях народного хозяйства.
Известен манипулятор, содержащий механическую руку с приводом продольного перемещения и механизм промежуточтюго позицио1шрования,вьпюлненныйв Виде вращающегося бараьана с упорами и демпфирующим устройствам, контакти1 рующим с неподвижным упором fl.
Однако наличие большого количества подвижных частей в таком манипуляторе ухудшает точность позиционирования.
Для уменьшения веса подвижных частей и увеличения точности позиционирования предлагаемый манипулятор с 1абжен планкой, установленной на корпусе, а барабан вьшолнен неподвижным в осевом направлении, причем упоры установлены с возможностью их осевого перемещения и взаимодействия через планку с демпфируюшим устройством и с неподвижным упором.
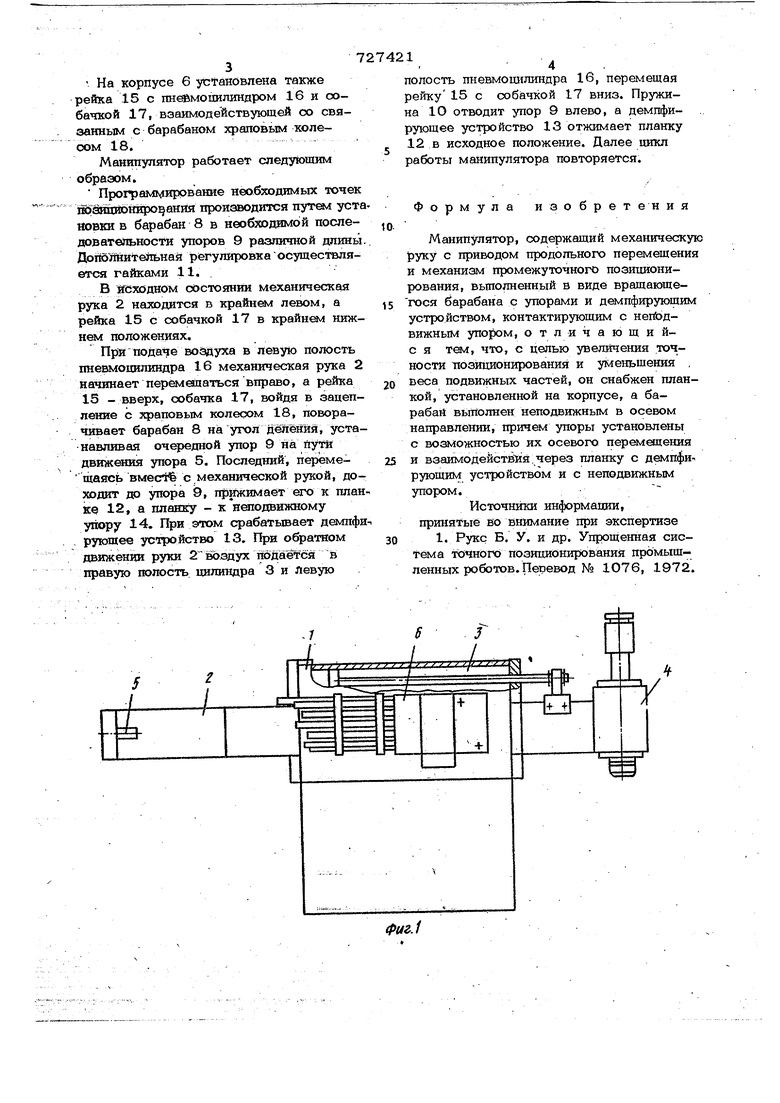
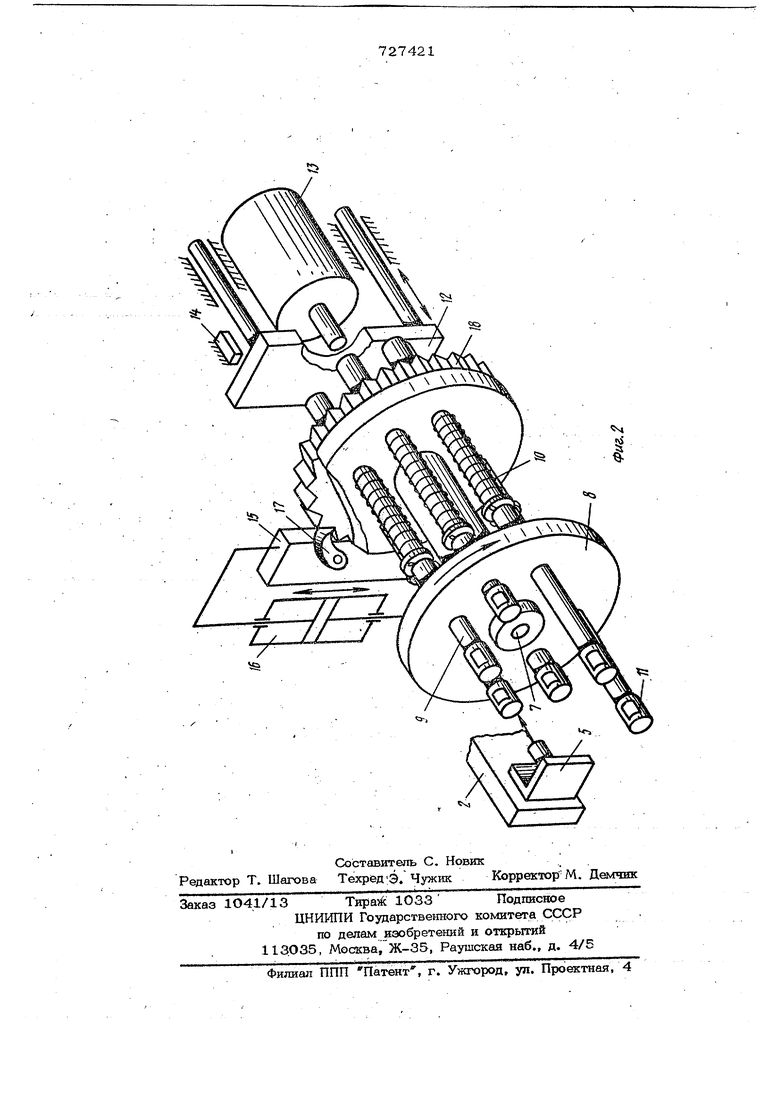
На фиг. 1 изображен предлагаемый манипулятор, общий вид; на фиг. 2 дана схема механизна промежуточного позиционирования,i
Манипулятор состоит из корпуса 1, в котором установлена механическая рука 2 с приводом продольного перемоцения, вьшолненным в виде пневмоцилиндра 3. На одном конце механической руки 2 закреплена рабочая головка 4, а на другом - упор 5. На корпусе манипулятора закреплен корпус 6 механизма промежуточного позиционирования с осью 7, несущей барабан 8 с двенадцатью регулируемыми упорами 9 и пружинами 10. На одном из концов упоров 9 имеются опорные гайки 11. В корпусе 6 расположена планка 12, имеющая возможность перемещения параллельно механической руке 2, и установленные на пути ее перемещения демпфирующее устройство 13 и неподвижный упор 14. На корпусе 6 установпена также рейка 15 с пнй&моцилиндром 16 и ообачкой 17, взаимодействующей со связанным с барабаном храповым колесом 18. Манипуп5ггор работает следующим образом. Прохт аммирование необходимых точек ЩётойЬйИро анйя производится путетл уст новки в барабан 8 в необходимой последовательности упоров 9 различной длины ДопбЖйтейьная регулировка осуществляется гайками 11. В Жсходном состоянии механическая рука 2 находится в крайнем левом, а рейка 15 с собачкой 17 в крайнем нижнем положениях. При подаче воздуха в левую пневмошшиндра 16 механическая рука 2 начинает перемещаться вправо, а рейка 15 - вверх, собачка 17, войдя в зацепление с храповым колесом 18, поворачивает барабан 8 на угол деления, устанавливая очередной упор 9 на йуТй движения упора 5. Последний, перемещаяеь вмесШ с механической рукой, доходит до упора 9, прижимает его к план ке 12, а планку - кнеподвижному yiiopy 14. При этом срабатьюает демпфи руюшее устройство 13. При обратном движении руки 2 1в6здух п6д(аётся в правую полость цилиндра 3 и левую 1 4. полость пневмош1линдра 16, перемещая рейку 15 с собачкой 17 вниз. Пружина 10 отводит упор 9 влево, а демпфирующее устройство 13 отжимает планку 12 в исходное положение. Далее цикл работы манипулятора повторяется. Формула изобретения Манипулятор, содержащий механическую руку с приводом продольного перемещения и механизм промежуточного позиционирования, вьтолненный в виде вращающегося барабана с упорами и демпфирующим устройством, контактирующим с непЬдвижным упором, отличающийс я тем, что, с целью увеличения точности тюзиционирования и уменьщения веса подвижных частей, он снабжен планкой, установленной на корпусе, а барабай вьпйлнен неподвижным в осевом направлении, причем упоры установлены с возможностью их осевого перемоцения и взаимодействйя; через планку с демпфирующим устройством и с неподвижным упором.Источники информации, принятые во внимание при экспертизе 1. Руке Б. У. и др. Упрощенная система точного позиционирования промыщленных роботов. Перевод № 1076, 1972.
-Д
