«1
Изобретение относится к горнорудной технике, в частности к погрузочным машинам непрерывного действия с гребковыми рабочими органами.
Целью изобретения является повыше- ние производительности машины и уменьшение потерь погруж:аемого материала.
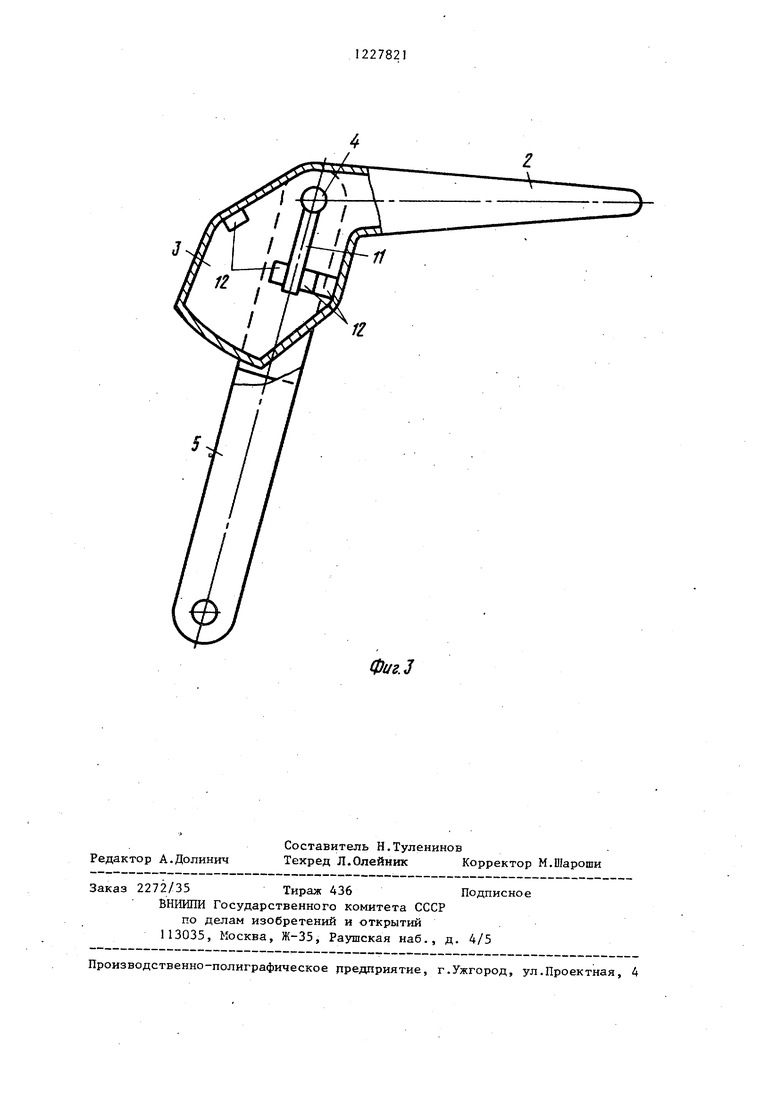
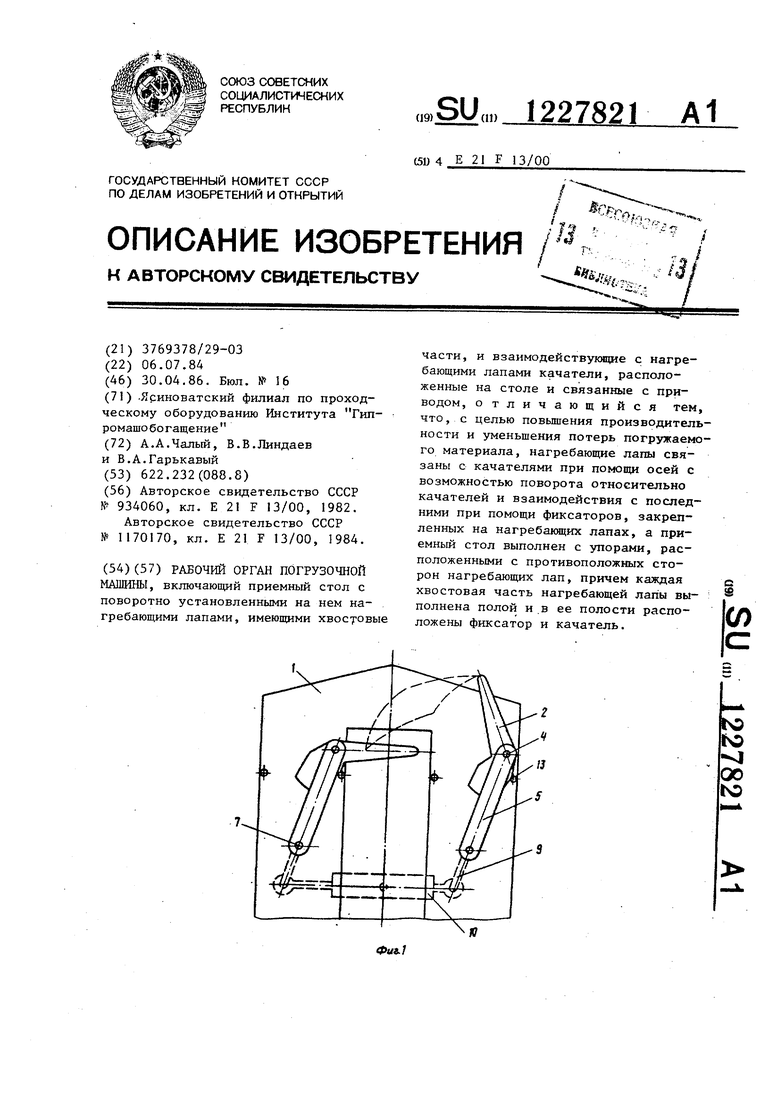
На фиг.1 представлен рабочий орган погрузочной машины, вид сверху; на фиг.2 - то же, вид сбоку; на фиг.З - нагребащая лапа рабочего органа с качателем.
Рабочий орган непрерывного действия включает приемный стол 1, нагре- бающие лапы 2, имеющие хвостовые части с закрытыми коробчатыми полостями 3. Нагребающие лапы 2 шарнирно закреплены на осях 4, жестко соединенных с качателями 5, имеющими П-образ- ные пазы 6, внутри которых перемещаются хвостовые части нагребающих лап 2. Качатели 5 жестко насажены на оси 7, установленные в подшипниках 8. Оси 7 через неподви;кио связанные с ними рычаги 9 соединены с гидроцилиндром 50 двойного действия, расположенным под приемным столом I. Внутри закрытых коробча :рьпс полосте-й установлены пластины 11,, одни концы ко- торых неподвижно соединены с осями 4 5 а на других концах и на боковых стенках внутри закрытых коробчатых полостей 3 установл€;ны механические или магнитные фиксаторы 12, На при- емном столе. 1 установлены непрдвизк- но четыре упора 13, расположенные с противоположных сачэрон нагребаю1цих лап.
Рабочий орган непрерывного действия работает следующим образом.
В исходном положении лапы 2 зафиксированы относительно качателей фиксаторами 12. Под действием гидроцилиндра 10 двойного действия лапы вместе с качателями 5 поворачиваются против часовой стрелки вокруг осей 7. При этом правая лапа производит нагребание груза, а левая лапа переводится в исходное положение. В конце хода хвостовые части 3 нагребающих лап 2, взаимодействуя с упорами 13, производят поворот лап 2 вокруг осей 4 против часовой стрелки до тех пор, пока левая лапа не зай- мет положение, обеспечивающее перемещение груза, а правая лапа будет готова к переводу в исходное положение. При этом лапы 2 относительно качателей 5 вновь зафиксируются фиксаторами 12. После реверсирования гидроцилиндра 10 двойного действия нагребающие лапы 2 вместе с качателями 5 поворачиваются по часовой стрелке вокруг осей 7, при этом левая лапа производит нагребание груза, а правая лапа переводится в исходное положение. Затем цикл повторяется.
Фиксаторы 12 предназначены для фиксации положения лап 2 относительно качателей в исходном положении и удержания лап 2 относительно качателей 5 в начальный период движения Удержание лап 2 относительно качателей 5 при работе производится силами реакции со стороны груза на лапы.
10
Фиг.З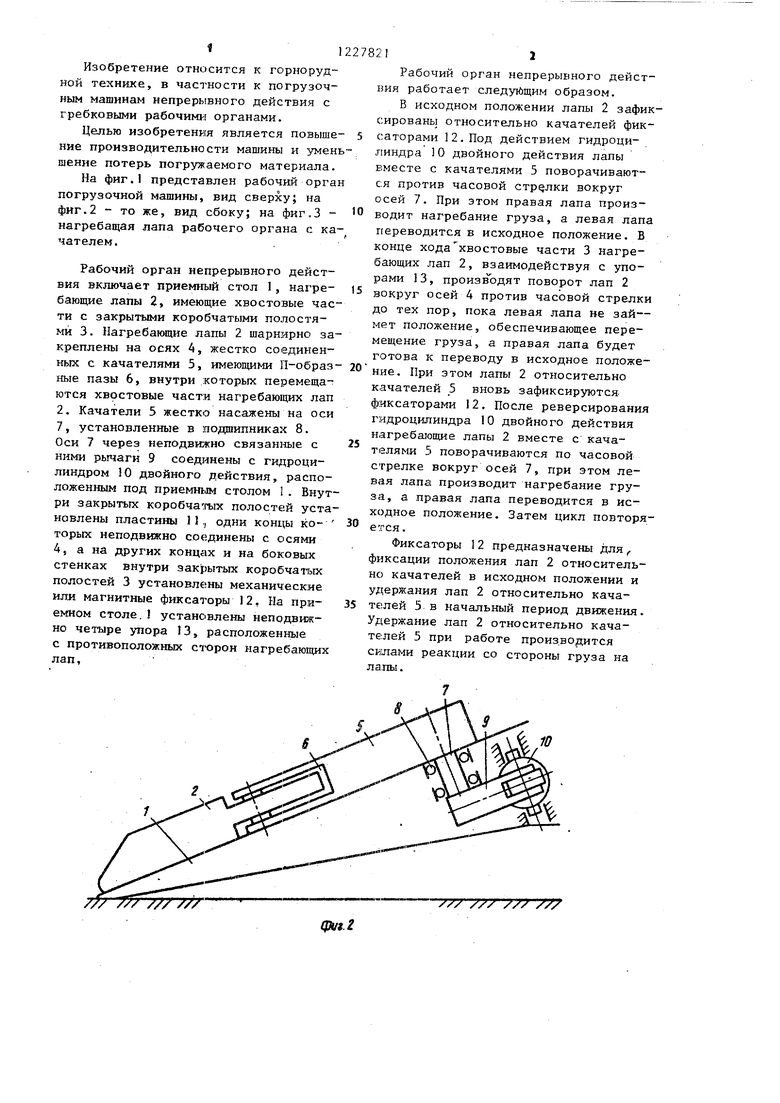
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган погрузочной машины | 1989 |
|
SU1661454A1 |
| Погрузочный орган непрерывного действия | 1981 |
|
SU983285A1 |
| Погрузочный орган непрерывного действия | 1981 |
|
SU1040182A1 |
| Рабочий орган погрузочной машины | 1984 |
|
SU1170169A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 2014 |
|
RU2560013C1 |
| Погрузочный орган непрерывного действия | 1980 |
|
SU934060A1 |
| Погрузочная машина | 1982 |
|
SU1084468A1 |
| Рабочий орган погрузочной машины | 1981 |
|
SU994777A1 |
| Погрузочная машина с нагребающими лапами | 1981 |
|
SU977829A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ С УСТРОЙСТВОМ ВЫПУСКА УГЛЯ | 2019 |
|
RU2709894C1 |
| Погрузочный орган непрерывного действия | 1980 |
|
SU934060A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Рабочий орган погрузочной машины | 1984 |
|
SU1170170A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
