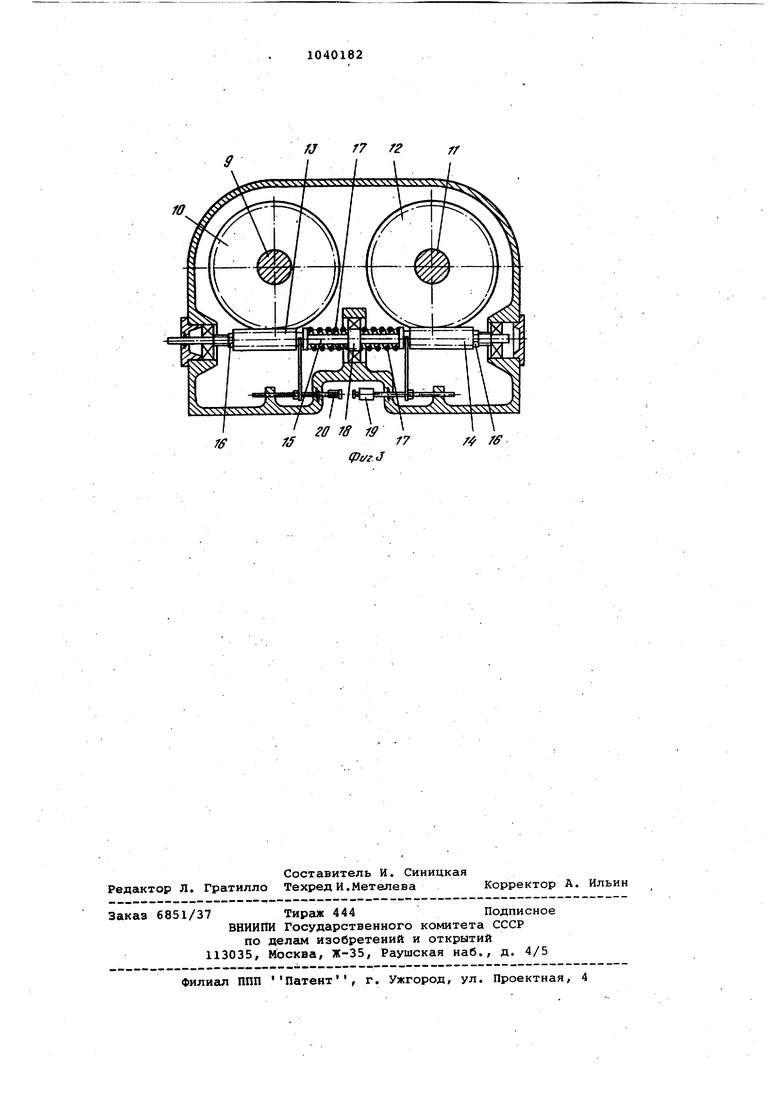
Изобретение относится к горному машиностроению, в частности к конструкциям погрузочных органов непрерывного действия, и может быть использовано в погрузочных машинах и проходческих комбайнах, оснащенных погрузочным органом с нагребающими лапами. Известен погрузочный орган непреРЕЛВНОГО действия, включающий приемный стол с одной наклонной плоскость нагребающие лапы, связанные со столом посредством кулис и поворотных дисков с кривошипами. Поворотные диски приводятся во вращение через червячные передачи Недостатком этого погрузочного органа является низкая надежность, так как динамические нагрузки, возникающие в процессе работы, передгиот ся через нагребающие лапы непосредственно на все элементы погрузочного органа. Наиболее близким к изобретению по технической. сущности является исполнительный орган погрузочной машины непрерывного действия, включающий приемный стол, на котором установлены диски, связанные с нагребающими лапами, двигатель, установленные на одном валу червяки и жестко связанные с дисками червячные колеса 2.. Однако надежность известного погрузочного органа все же недостаточ на так как из-за стесненности габаритов применение торсионного вала неэффективно: вал выполнен коротким вследствие чего он имеет большую жесткость и его демпфирующие воэмож . ности ограничены. Торсионный вал не предохраняет элементы погрузочного органа от перегрузок при полном зак линивании нагребающих лап и останов ке поворотных дисков, так как связать его с датчиком, отключающим в этом случае двигатель, практически невозможно. Целью изобретения является повыше ние надежности погрузочного органа непрерывного действия. Поставленная цель достигается . тем, что в погрузочном органе непре рывного действия, включающем приемнь й стол, на котором установлены диски, связанные с нагребающими лап ми, двигатель, установленные на одном валу червяки и жестко связанные с дисками червячные колеса, червяки установлены на валу с возможностью, осевого перемещения и связаны посред ством упругого элемента. При этом погрузочный орган снаб жен датчиком предельных перемещений связанным с одним из червяков посредством рычажного механизма и имею щим упор, связанный с другим червяком посредством дополнительного .рыча ного механизма. На фиг.1 дана кинематическая схема погрузочного органа, вид сверху; на фиг.2 - кинематическая схема погрузочного органа, фронтальный вид; на фиг.З - редуктор погрузочного органа, разрез. Погрузочный орган непрерывного действия состоит из приемного стола 1,нагребающих лап левой 2 и правой 3, связанных со столом 1 посредством поворотных дисков левого 4 и правого 5. На левом поворотном диске 4 установлен кривошип 6, а на правом поворотном диске 5 - кривошип 7. Кулисы 8 установлены на приемном столе 1. На.валу 9 левого поворотного диска 4 установлено червячное колесо 10, на валу 11 правого поворотного диска 5 - червячное колесо 12. Оси валов 9 и 11 и соответственно червячных колес 10 и 12 не параллельны. Червячное колесо 10 входит в за-, цепление с червяком 13, а червячное колесо 12 - с червяком 14, Червяки 13 и 14 имеют встречное направление нарезки витков и установлены с-возможностью осевого перемещения на валу 15. Червяки 13 и 14 одним торцом опираются на регулируемый упор 16 {гайку, установленную на резьбе, выполненной на валу 15), другим контактируют с упругим элементом 17. Упругие элементы 17 выполнены в виде пружин сжатия и размещены на валу 15 с другой стороны. С одним из червякрв, например с червяком 14, соедине.н датчик .19 предельных перемещений, выполненный в |виде концевого выключателя, а с другим червяком. - регулируемый упор 20, Длина червяков 13 и 14 больше расчетной на величину их возможного осевого .-перемещения. Вал 15 соединен с двигателем 21 с помощью ко.ническрй передачи 22 и муфты 23, Погрузочный орган непрерывного действия работает следующим образом. Вращение от электродвигателя 21 через муфту 23 и коническую передачу 22 передается на вал 15 и расположенные на нем черйяки 13 и 14, От них через червячные колеса 10 и 12, валы 9 и 11 вращение передается поворотным диском 4 и 5 с расположенными на них кривошипами б и 7. Червяки 13 и 14 имеют встречное направление нарезки витков, кривошип 6 вращается по часовой стрелке, а кривошип7 - в противоположном направлении. Через кривошипы 6 и 7 и кулисы 8 нагребающие лапы 2 и 3 получают качательное движение и производят нагребание отбитой горной массы на приемный стол 1. При увеличении сопротивления на какой-либо из лап, например на лапе 2,до уровня, превышающего расчетный, происходит следующее. Червячное колесо 10, связанное-с этой лапой, тормозится. Червяк 13 продолжает, вращаться и, взаимодействуя с червячным колесом 10, смещается вдоль вала 15, сжимая пружину 17 до тех пор, пока осевое усилие на червяке 13 не достигнет уровня, достаточног для поворота червячного колеса 10 и соединенной с ним лапы 2. В резул тате динамические нагрузки, действующие на элементы погрузочного органа, значительно уменьшаются. I .. . Нагрузка на червяке пропорциональна величине перемещения этого червяка. Сумма перемещений двух чер вяков 13 и 14 пропорциональна нагрузке надвигатель 21. Так как упор 20 соединен с червяком 13, а датчик 19 предельных перемещений с червяком 14, то перемещение упора 20 относительно датчика 19 предельн перемещений равно сумме перемещений обоих червяков, т.е. пропорциональн нагрузке на двигатель 21. Когда нагрузка на двигатель 21 превышает максимсшьно допустимую, упор 20 дей ствует на датчик 19 предельных пере мещений, датчик срабатывает и подае команду на отключение двигателя 21. Отключение двигателя 21 происходит как при заклинивании любой из лап, так и при повышении суммарного сопротивления на лапах 2 и 3 до уровня, превышающего допустимый для двигателя 21. Величина допустимых нагрузок на двигатель 21 определяет ся жесткостью пружин 17 и величиной зазора Ц меясду упором-20 и датчиком 19.в исходном положении. Изменяя величину зазора L с помощью регулируемого упора 20 (регулируется, например, посредством вращения гайки), устанавливают величину нагрузок, при которой срабатывает датчик 19 и отключается двигатель 21. Таким образом, использование в погрузочном органе непрерывного действия для привода лап подпружиненных червяков, установленных на вешу с возможностью осевого перемещения, обеспечивает уменьшение динамических нагрузок, действующих на элементы погрузочного органа, в результате чего надежность погрузочного органа возрастает. Установка датчика предельных перемещений и соединение его с одним червяком, а упора с другим, обеспечивает автоматическое от.ключение двигателя как при заклинивании любой из лап, так и при увеличении суммарного сопротивления на лапах до уровня, превышающего допустимый.Это исключает перегрузки двигателя,, повышает надежность погрузочного органа и, кррме того, повышает удобство в эксплуатации. Использование предлагаемого изобретения приведет к сокращеЬию числа ремонтов из-за поломок погрузочного органа от динамических нагрузок. В результате экономится мгииинное время и затраты на ремонт.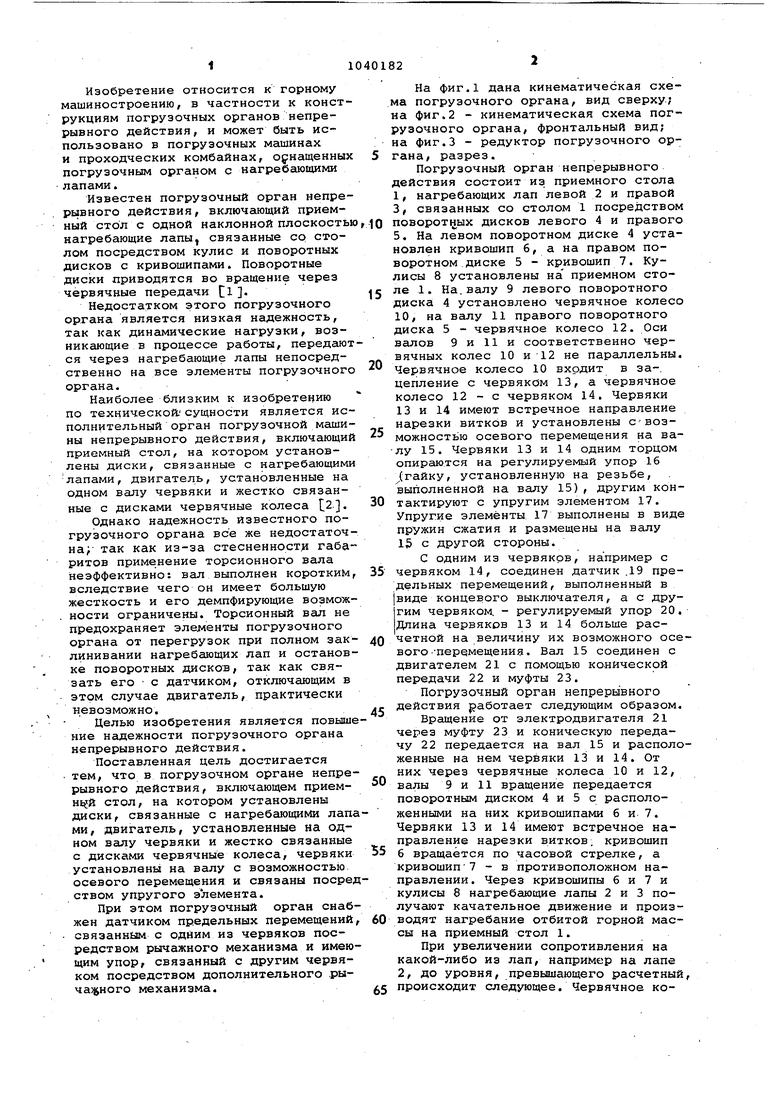

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗОЧНЫЙ ОРГАН АКТИВНОГО ДЕЙСТВИЯ | 2010 |
|
RU2467172C2 |
| Погрузочный орган горной машины | 1983 |
|
SU1145161A1 |
| Рабочий орган погрузочной машины | 1984 |
|
SU1227821A1 |
| Погрузочная машина с нагребающими лапами | 1981 |
|
SU977829A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 2014 |
|
RU2560013C1 |
| Устройство для обработки кольцевого желоба переменного профиля | 1973 |
|
SU515628A1 |
| Погрузочный орган непрерывного действия | 1981 |
|
SU973872A1 |
| Погрузочный орган непрерывного действия | 1981 |
|
SU983285A1 |
| Станок для обработки кольцевого желоба переменного профиля | 1988 |
|
SU1645108A1 |
| Рабочий орган погрузочной машины непрерывного действия | 1981 |
|
SU981626A1 |
1. ПОГРУЗОЧНЫЙ ОРГАН НЕПРЕРЫВНОГО ДЕЙСТВИЯ, включающий приемJный стол, на котором установлены диски, связанные с нагребгиощими лапами, двигатель, установленные на одном валу червяки и жестко связанные с дисками червячные колеса, отличающийся тем, что, с целью повышения надежности погрузочного органа, червяки установлены на ва1лу с возможностью осевого перемещения и связаны посредством упругого эле, мента. . 2. Орган по п. 1, отлича ющ и и с я тем, что он снабжен датчиком- предельных перемещений, связанным сОДНИМ из червяков посредством рычажного механизма и имеющим упор, связанный с другим червяком посредством дополнительного рычажно(Л го механизма. 2J 00 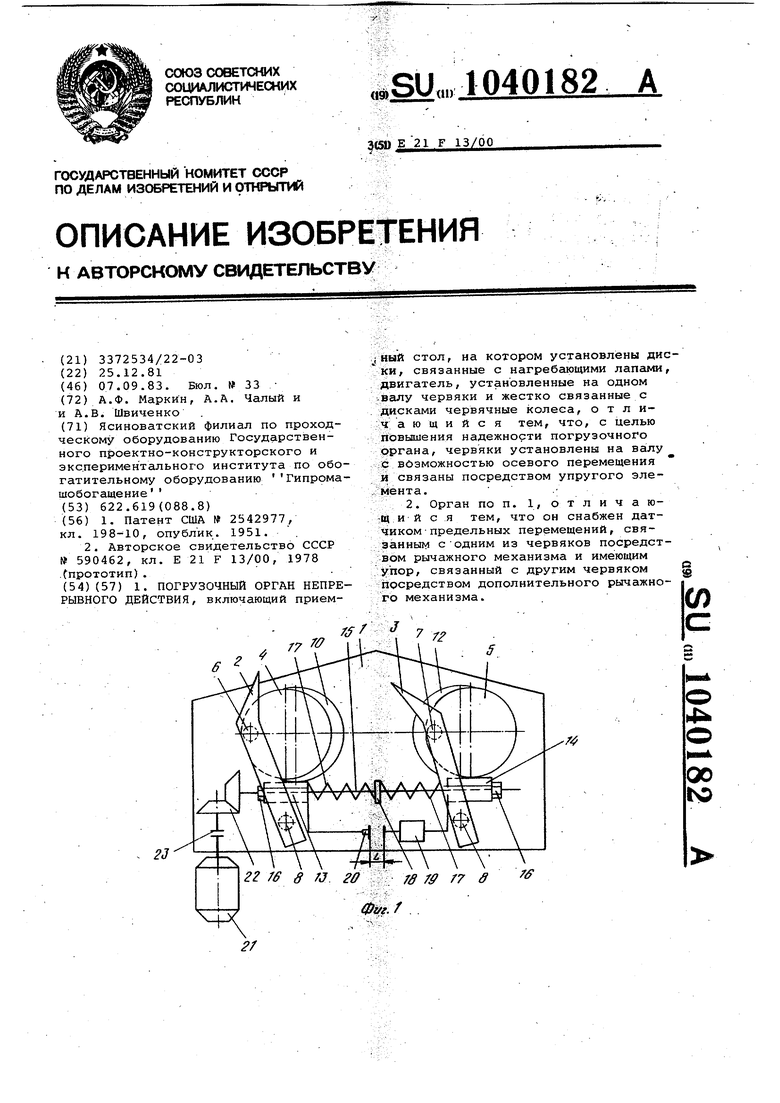
f7 fff Г8
/
//
76 J
Фг/г. 2
Л7 /7 f2 //
20 78 fff , fJf7
/ /ff
фvгJ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| НАНЕСЕНИЕ ЛЕГИРОВАННЫХ ПЛЕНОК ZnO НА ПОЛИМЕРНЫЕ ПОДЛОЖКИ ХИМИЧЕСКИМ ОСАЖДЕНИЕМ ИЗ ГАЗОВОЙ ФАЗЫ ПОД ВОЗДЕЙСТВИЕМ УФ | 2010 |
|
RU2542977C2 |
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Приспособление к пишущей машине для назначения и указания последней строки страницы | 1925 |
|
SU1951A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Исполнительный орган погрузочной машины непрерывного действия | 1976 |
|
SU590462A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
