15
20
25
Изобретение относится к автоматике и вычислительной технике, в частности к устройствам с самоконтролем, и Может найти применение при проектировании микропроцессорных систем 5 управления промьшшенными роботами.
Целью изобретения является повышение надежности устройства.
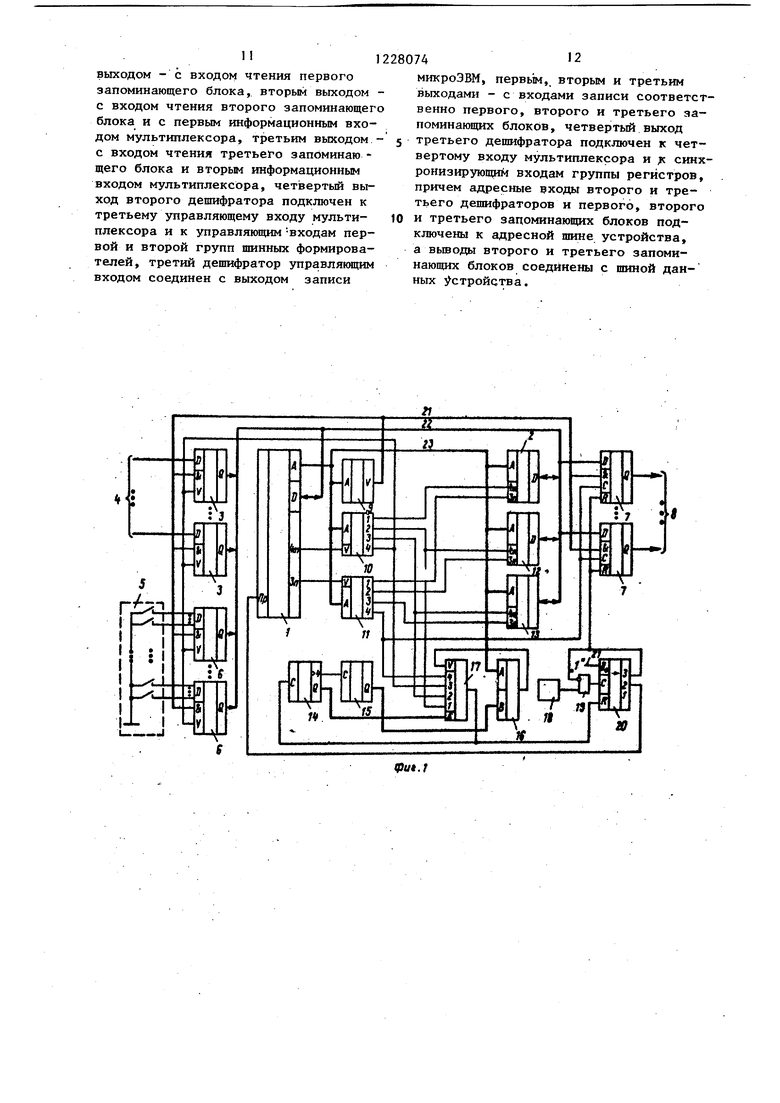
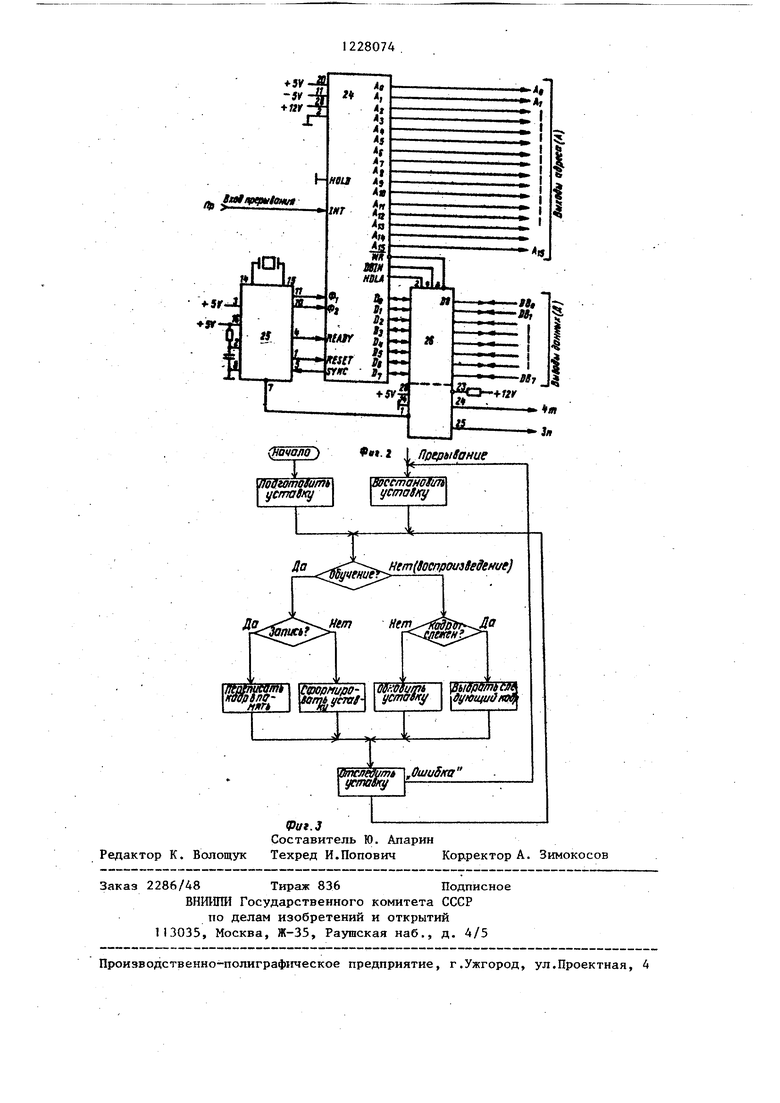
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - структура микроэвм; на фиг. 3 - граф- схема алгоритма работы устройства.
Устройство для управления роботом содержит микроэвм 1, первый запоминающий блок 2, первую группу шинных формирователей 3, информационные входы 4 устройства, входы 5 переключения устройства, вторую группу шинных формирователей 6, группу регистров 7, выходы 8 устройства, первый 9, второй 10 и третий 11 дешифраторы, второй 12 и третий 13 запоминающие блоки, первый 14 и второй 15 счет- tчики, компаратор 16, мультиплексор 17, генератор 18 импульсов, элемент И 19, регистр 20 сдвига, шину 21 управления, шину 22 данных и адресную щину 23 устройства.
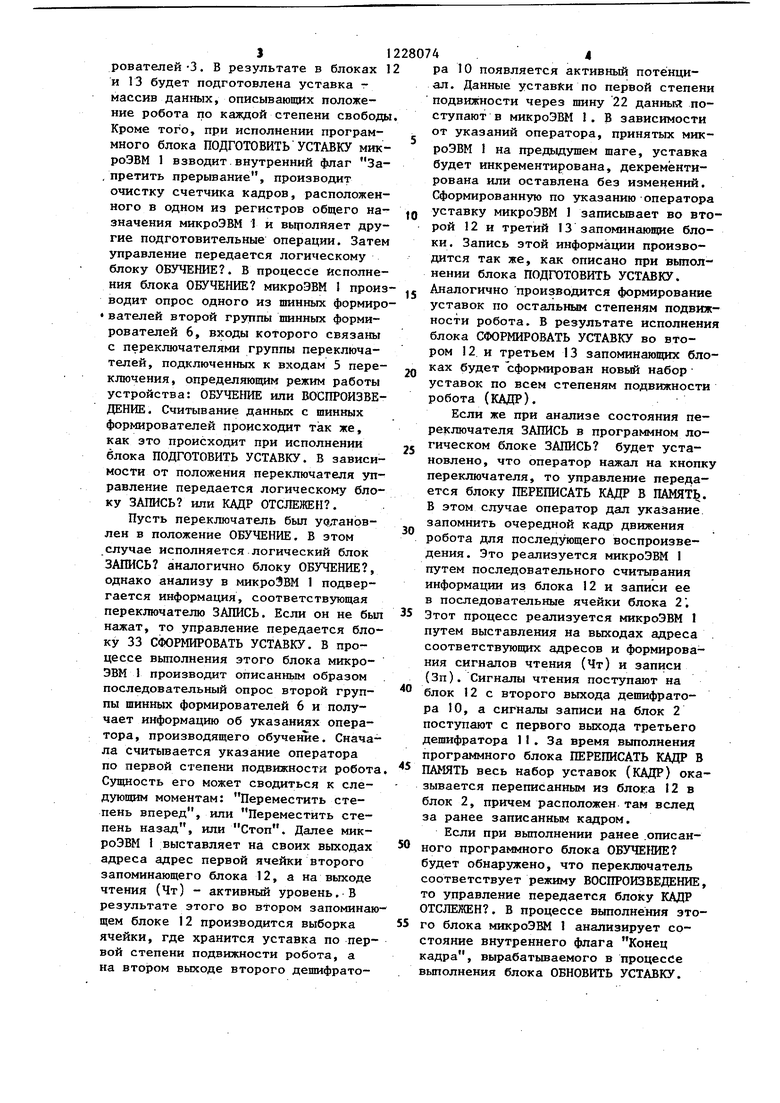
Микроэвм 1 содержит микропроцессор 24, генератор 25 синхроимпульсов, системный контроллер 26.Входы 4 и выходы 8 устройства представляют собой совокупность проводников (линий) и предназначены для связи его с объектом управления - 35 роботом.
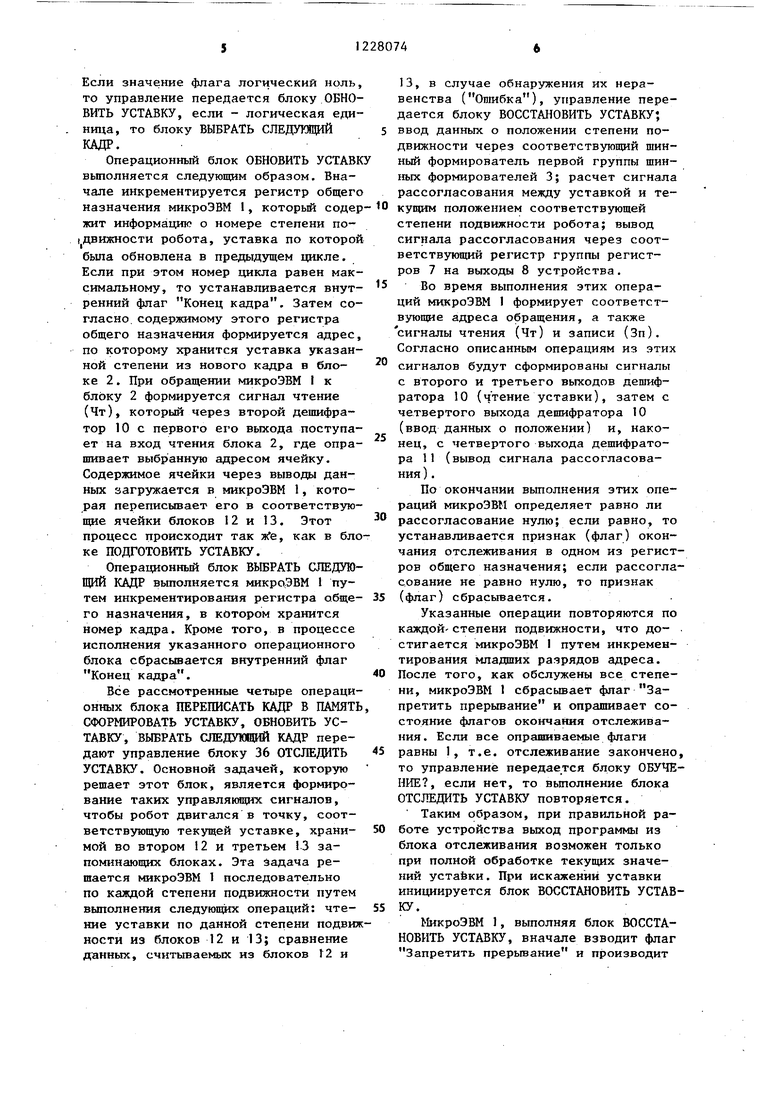
Граф-схема алгоритма работы устройства содержит блоки ПОДГОТОВИТЬ УСТАВКУ и ВОССТАНОВИТЬ УСТАВКУ, выходы которых связаны с входом логи- 40 ческого блока: ОБУЧЕНИЕ, выход ДА которого связан с входом логического блока ЗАПИСЬ, выход ДА которого, в свою очередь, связан с входом блока ПЕРЕПИСАТЬ КАДР В ПАМЯТЬ, а вы- 45 ход НЕТ - с входом блока СФОРМИРОВАТЬ УСТАВКУ, выходы двух последних блоков связаны с входом блока ОТСЛЕДИТЬ УСТАВКУ, выход которого связан с входом логического блока ОБУЧЕНИЕ, 50 выход НЕТ которого связан с входом логического блока КАДР ОТСЛЕЖЕН, выходы НЕТ и ДА которого связаны соответственно с входами блоков ОБНО30
раммой, размещенной в первом запоминающем блоке 2.
Устройство для управления роботом работает следующим образом.
После включения питания микроЭВМ 1 исполняет программный блок ПОДГОТОВИТЬ УСТАВКУ. В процессе выполнения этого блока микроэвм I выставляет на выходах адреса адрес первого шинного формирователя первой группы шинных формирователей 3. Младшие разряды этого адреса декодируются первым дешифратором 9, и с его выхода разрешающий сигнал поступает на разрешающий вход первого шинного формирователя первой группы шинных формирователей 3. Старшие разряды адреса декодируются вторым дешифратором IО. Затем микроэвм 1 вырабатывает сигнал на выходе чтения (Чт), которьй посту- пает на упра.вляющий вход второго дешифратора 10. В результате этого активный уровень появится на четвертом выходе второго дешифратора 10. Этот сигнал поступит на управляющий вход первого шинного формирователя первой группы шинных формирователей 3. В результате совпадения сигналов на разрешающем и управляющем входах первого шинного формирователя первой группы шинных формирователей 3 он пропускает сигналы датчика положения робота с входов 4 на выходы, откуда они поступают через шину 22 данных в микро-ЭВМ 1 .
Затем микроэвм 1 выставляет на своих выходах адреса адрес первой ячейки блока 12 и вырабатывает сигнал на выходе записи (Зп). Младшие разряды адреса обеспечивают выборку первой ячейки блока 12, а старшие разряды декодируются дешифратором 11, который пропускает на второй выход сигнал записи. Этот сигнал поступает на вход записи блока 12 и обеспечивает запись в него кода положения с шины 22 данных.
Затем микроэвм 1 выставляет на выходах адреса адрес первой ячейки блока 13 и вьфабатьюает сигнал записи. В результате этого та же информация о положении робота записывается также в первую ячейку блока 13. Процесс записи протекает аналогично описанному, однако сигнал записи поступает на
ВИТЬ УСТАВКУ и ВЫБРАТЬ СЛЕДУЮЩИЙ КАДР,55 блок 13 в соответствии с адресом с выходы которых связаны с входом бло- третьего вькода третьего дешифрато- ка ОТСЛЕДИТЬ УСТАВКУ. Все блоки граф- ра П. Затем весь этот процесс по- схемы представлены в устройстве прог- шторяется для остальных шинных формиг
5
0
5
5
0 5 0
0
раммой, размещенной в первом запоминающем блоке 2.
Устройство для управления роботом работает следующим образом.
После включения питания микроЭВМ 1 исполняет программный блок ПОДГОТОВИТЬ УСТАВКУ. В процессе выполнения этого блока микроэвм I выставляет на выходах адреса адрес первого шинного формирователя первой группы шинных формирователей 3. Младшие разряды этого адреса декодируются первым дешифратором 9, и с его выхода разрешающий сигнал поступает на разрешающий вход первого шинного формирователя первой группы шинных формирователей 3. Старшие разряды адреса декодируются вторым дешифратором IО. Затем микроэвм 1 вырабатывает сигнал на выходе чтения (Чт), которьй посту- пает на упра.вляющий вход второго дешифратора 10. В результате этого активный уровень появится на четвертом выходе второго дешифратора 10. Этот сигнал поступит на управляющий вход первого шинного формирователя первой группы шинных формирователей 3. В результате совпадения сигналов на разрешающем и управляющем входах первого шинного формирователя первой группы шинных формирователей 3 он пропускает сигналы датчика положения робота с входов 4 на выходы, откуда они поступают через шину 22 данных в микро-ЭВМ 1 .
Затем микроэвм 1 выставляет на своих выходах адреса адрес первой ячейки блока 12 и вырабатывает сигнал на выходе записи (Зп). Младшие разряды адреса обеспечивают выборку первой ячейки блока 12, а старшие разряды декодируются дешифратором 11, который пропускает на второй выход сигнал записи. Этот сигнал поступает на вход записи блока 12 и обеспечивает запись в него кода положения с шины 22 данных.
Затем микроэвм 1 выставляет на выходах адреса адрес первой ячейки блока 13 и вьфабатьюает сигнал записи. В результате этого та же информация о положении робота записывается также в первую ячейку блока 13. Процесс записи протекает аналогично описанному, однако сигнал записи поступает на
рователей-3. В результате в блоках 12 и 13 будет подготовлена уставка - массив данных, описывающих положение робота по каждой степени свободы. Кроме того, при исполнении программного блока ПОДГОТОВИТЬ УСТАВКУ мик- роЭВМ 1 взводит внутренний флаг Запретить прерывание, производит очистку счетчика кадров, расположенного в одном из регистров общего назначения микроэвм 1 и выполняет другие подготовительные операции. Затем управление передается логическому блоку ОБУЧЕНИЕ. В процессе исполнения блока ОБУЧЕНИЕ микроЭВМ I производит опрос одного из шинных формирователей второй группы шинных формирователей 6, входы которого связаны с переключателями группы переключателей, подключенных к входам 5 переключения, определяющим режим работы устройства: ОБУЧЕНИЕ или ВОСПРОИЗВЕДЕНИЕ. Считывание данных с шинных формирователей происходит так же, как зто происходит при исполнении блока ПОДГОТОВИТЬ УСТАВКУ. В зависимости от положения переключателя управление передается логическому блоку ЗАПИСЬ или КАДР ОТСЛЕЖЕН.
Пусть переключатель был уа танов- лен в положение ОБУЧЕНИЕ. В этом случае исполняется логический блок ЗАПИСЬ аналогично блоку ОБУЧЕНИЕ, однако анализу в микроЭВМ 1 подвергается информация, соответствующая переключателю ЗАПИСЬ. Если он не был нажат, то управление передается блоку 33 СФОРМИРОВАТЬ УСТАВКУ. В процессе вьтолнения этого блока микро- ЭВМ 1 производит описанным образом последовательный опрос второй группы шинных формирователей 6 и получает информацию об указаниях оператора, производящего обучение. Сначала считывается указание оператора по первой степени подвижности робота. Сущность его может сводиться к следующим моментам: Переместить степень вперед, или Переместить степень назад, или Стоп. Далее мик- роЭВМ I выставляет на своих выходах адреса адрес первой ячейки второго запоминающего блока 12, а на выходе чтения (Чт) - активный уровень. В результате этого во втором запоминающем блоке 12 производится выборка ячейки, где хранится уставка по первой степени подвижности робота, а на втором выходе второго дешифрато
5
0
5
0
5
0
5
0
5
ра 10 появляется активный потенциал. Данные уставли по первой степени подвизкности через шину 22 данные поступают в микроэвм 1. В зависимости от указаний оператора, принятых мик- роЭВМ 1 на предыдушем шаге, уставка будет инкрементирована, декремёнти- рована или оставлена без изменений. Сформированную по указанию оператора уставку микроэвм 1 записьгоает во второй 12 и третий 13 запоминающие блоки. Запись этой информации производится так же, как описано при вьтол- нении блока ПОДГОТОВИТЬ УСТАВКУ. Аналогично производится формирование уставок по остальным степеням подвижности робота. В результате исполнения блока СФОРМИРОВАТЬ УСТАВКУ во втором 12 и третьем 13 запоминающих блоках будет сформирован новый набор уставок по всем степеням подвижности робота (КАДР).
Если же при анализе состояния переключателя ЗАПИСЬ в программном логическом блоке ЗАПИСЬ будет установлено, что оператор нажал на кнопку переключателя, то управление передается блоку ПЕРЕПИСАТЬ КАДР В ПАМЯТЬ. В этом случае оператор дал указание запомнить очередной кадр движения робота для последующего воспроизведения. Это реализуется микроЭВМ I путем последовательного считывания информации из блока 12 и записи ее в последовательные ячейки блока 2. Этот процесс реализуется микроЭВМ 1 путем выставления на выходах адреса соответствующих адресов и формирования сигналов чтения (Чт) и записи (Зп). Сигналы чтения поступают на блок 12 с второго выхода дешифратора 10, а сигналы записи на блок 2 поступают с первого выхода третьего дешифратора 11. За время выполнения программного блока ПЕРЕПИСАТЬ КАДР В ПАМЯТЬ весь набор уставок (КАДР) оказывается переписанным из блока 12 в блок 2, причем расположен там вслед за ранее записанным кадром.
Если при выполнении ранее .описанного программного блока ОБУЧЕНИЕ будет обнаружено, что переключатель соответствует режиму ВОСПРОИЗВЕДЕНИЕ, то управление передается блоку КАДР ОТСЛЕЖЕН. В процессе выполнения этого блока микроЭШ 1 анализирует состояние внутреннего флага Конец кадра, вырабатываемого в процессе выполнения блока ОБНОВИТЬ УСТАВКУ.
Если значение флага логический ноль то управление передается блоку ОБНОВИТЬ УСТАВКУ, если - логическая единица, то блоку ВЫБРАТЬ СЛЕДУЩИЙ КАДР.
Операционный блок ОБНОВИТЬ УСТАВК вьтолняется следующим образом. Вначале инкрементируется регистр общего назначения микроЭВМ i, который содер жит информацию о номере степени по- (Движности робота, уставка по которой быпа обновлена в предыдзпцем цикле. Если при этом номер цикла равен максимальному, то устанавливается внут- ренний флаг Конец кадра. Затем согласно содержимому этого регистра общего назначения формируется адрес, по которому хранится уставка указанной степени из нового кадра в блоке 2. При обращении микроЭВМ I к блоку 2 формируется сигнал чтение (Чт), который через второй дешифратор 10 с первого его вьпсода поступает на вход чтения блока 2, где опрашивает выбранную адресом ячейку. Содержимое ячейки через выводы данных загружается в микроЭВМ 1, которая переписывает его в соответствующие ячейки блоков 12 и 13. Этот процесс происходит так жГе, как в блоке ПОДГОТОВИТЬ УСТАВКУ.
Операционный блок ВЫБРАТЬ СЛЕДУЮЩИЙ КАДР выполняется микроЭВМ 1 путем инкрементирования регистра обще- го назначения, в котором хранится номер кадра. Кроме того, в процессе исполнения указанного операционного блока сбрасывается внутренний флаг Конец кадра.
Все рассмотренные четыре операционных блока ПЕРЕПИСАТЬ КАДР В ПАМЯТЬ СФОРМИРОВАТЬ УСТАВКУ, ОБНОВИТЬ УСТАВКУ, ВЫБРАТЬ СЛЕДУЮЩИЙ КАДР передают управление блоку 36 ОТСЛЕДИТЬ УСТАВКУ. Основной задачей, которую решает этот блок, является формирование таких управляющих сигналов, чтобы робот двигался в точку, соответствующую текущей уставке, храни- мой во втором 12 и третьем 13 запоминающих блоках. Эта задача решается микроэвм 1 последовательно по каждой степени подвижности путем выполнения следуюпщх операций: чте- ние уставки по данной степени подвижности из блоков 12 и 13; сравнение д анных, считываемых из блоков t2 и
0
5
5
0
13, в случае обнаружения их неравенства (Опгабка), управление передается блоку ВОССТАНОВИТЬ УСТАВКУ; ввод данных о положении степени подвижности через соответствующий шинный формирователь первой группы шинных формирователей 3; расчет сигнала рассогласования между уставкой и текущим положением соответствующей степени подвижности робота; вывод сигнала рассогласования через соот- ветствзтощий регистр группы регистров 7 на выходы 8 устройства,
Во время выполнения этих операций микроэвм 1 формирует соответствующие адреса обращения, а также сигналы чтения (Чт) и записи (Зп). Согласно описанным операциям из этих сигналов будут сформированы сигналы с второго и третьего выходов дешифратора 10 (чтение уставки), затем с четвертого выхода дешифратора 10 (ввод данных о положении) и, наконец, с четвертого выхода дешифратора 11 (вывод сигнала рассогласования ).
По окончании вьтолнения этих операций микроэвм определяет равно ли рассогласование нулю; если равно, то устанавливается признак (флаг) окончания отслеживания в одном из регистров общего назначения; если рассогласование не равно нулю, то признак (флаг) сбрасьгеается.
Указанные операции повторяются по каждой-степени подвижности, что достигается микроэвм I путем инкрементирования младших разрядов адреса. После того, как обслужены все степени, микроэвм 1 сбрасывает флаг Запретить прерывание и опрашивает состояние флагов окончания отслеживания. Если все опрапшваемые флаги равны 1, т.е. отслеживание закончено, то управление передается блоку ОБУЧЕНИЕ, если нет, то вьтолнение блока ОТСЛЕДИТЬ УСТАВКУ повторяется.
Таким образом, при правильной работе устройства выход программы из блока отслеживания возможен только при полной обработке текущих значений устайки. При искажений уставки инициируется блок ВОССТАНОВИТЬ УСТАВКУ.
Микроэвм 1, выполняя блок ВОССТАНОВИТЬ УСТАВКУ, вначале взводит флаг Запретить прерьшание и производит
переписьгоайие данных о состоянии датчиков положения робота из первой группы тинных формирователей 3 в блоки 12 и 13. Это производится так же, как в блоке ПОДГОТОВИТЬ УСТАВКУ. Следовательно, если произошел сбой информации в блоках 12 и 13, то она будет возобновлена путем вьшолнения блока ВОССТАНОВИТЬ УСТАВКУ и нормальная работа устройства может быть продолжена .;
Из структурной схемы программы работы устройства видно, что нормальная его работа заключается в многократном циклическом воспроизведении рабочих блоков, причем блок ОТСЛЕДИТЬ УСТАВКУ повторяется в любом из четырех возможных циклов, а выполнение остальных блоков определяется положением органов управления группы переключателей, подключенных к входам положением робота. Ввиду конечности всех рабочих блоков блок ОТСЖДИТЬ УСТАВКУ при нормальном функционировании устройства должен повторяться через гаранти- рованный промежуток времени. Это не- обходимо для обеспечения точности динамических параметров движения робота . Если же происходит отклонение от нормальной работы устройства, то необходимо восстановить программно его нормальную работу, а в случае отказа микроЭВМ 1 - остановить движение робота, выдав на выходную шину 8 нулевые управляющие сигналы.
Если устройство функционирует в соответствии с граф-схемой, то пе- риодически будет выполняться блок ОТСЛЕДИТЬ УСТАВКУ, Пусть первый 14 и второй 15 счетчики находятся в обнуленном состоянии, а микроЭВМ 1 начинает вьшЬлненйе отслеживания по степени номер 0. В этом случае код на младших разрядах выходов адреса микроэвм 1 совпадает с кодом во втором счетике 15. Это приводит к срабатьшанию компаратора 16. Сигнал с выхода последнего разрешает работу мультиплексора 17. Поскольку на адресные входы мультиплексора поступает нулевой код с выхода первого счетчика 14, то потенциально открыт первый информационный вход. Следовательно, во время чтения микроэвм 1 блока 12 на выходе мультиплексора 17 появляется импульс, который увеличивает на единицу содержимое первого счетчика 14. В результате на выходе мультиплексо5
G
pa 17 появляется импульс при опросе микроэвм 1 блока 13, т.е. потенциально открытым в этот раз будет второй информационный вход мультиплексора 17. Первый счетчик 14 переходит в следующее состояние.
Далее выделяется импульс опроса первого шинного формирователя первой группы шинных формирователей 3, заQ тем импульс вывода данных на первый регистр группы регистров 7. Последний вызывает переполнение двухразрядного счетчика 14 и инкремент счетчика -15. Состояние последнего обеспечивает вьщеление последовательности импульсов, соответствующих обработке данных по очередной степени подвижности робота (номер указанной степени и содержится в счетчике 15). Этот процесс продолжается до конца выполнения блока ОТСЛЕДИТЬ УСТАВКУ, т.е., если устройство функционирует нормально, то на выходе мультиплексора I7 наблюдается непрерьшная по5 следовательность импульсов, максимальный интервал между которыми не превьш1ает времени вьтолнения самого длинного из программных блоков.
В случае отклонений в функционировании устройства в результате сбоя или отказа последовательность сигналов нарушается, в результате чего мультиплексор 7 с 1гналов не припускает, а первый 14 и второй 15 счетчики останавливаются. На выходе муЛь5 типлексора 17 импульсы отсутствуют. Эти импульсы перестают поступать и на вход сброса регистра 20 сдвига, в результате чего он начинает воспринимать импульсы сдвига с выхода ге0 нератора 18 импульсов. Для нормальной работы устройства его период выбирается несколько большим, чем максимально возможный интервал времени между импульсами с выхода мультиплек5 сора 17. Первый импульс сдвига приводит к появлению логической единицы на выходе первого разряда. При зтом никаких изменений в схеме устройства не происходит. Второй импульс сдвига
0 с выхода генератора 18 приводит к тому, что единичный потенциал появляется и на выходе второго разряда регистра 20 сдвига. приводит к появлению сигнала на входе прерывания
5 микроэвм 1. Если микроЭВМ 1 исправна, а отклонения в ее работе обусловлены сбоями, то нормальная работа устройства восстанавливается путем выполне0
ния блока ВОССТАНОВИТЬ УСТАВКУ и перехода к нормальному рабочему циклу. При этом на выходе мультиплексора 17 возобновляются импульсы и регистр сдвига 20 обнуляется.
Если же микроэвм 1 в результате отказа не может восстановить нормальную работу устройства, то импульсы на выходе мультиплексора 17 не появлются, а регистр 20 сдвига сдвигает информацию еще на один разряд. Логическая единица, поступающая с выхода третьего разряда регистра сдвига 20, воздействует на инверсный вход элемента И 19, благодаря чему поступление импульсов на вход сдвига регистр прекращается и его состояние фиксируется. Кроме того, эта логическая единица поступает на входы сброса группы регистров 7. Это приводит к установке нулевых управляющих сигналов на выходах 8 устройства и, следовательно, аварийному останову робота .
Первоначальная установка первого 14 и второго 15 счетчиков и регисра 20 сдвига не нужна, так как при нормальной работе устройства до окончания первого цикла отслеживания запрещено аварийное прерывание. В процессе же исполнения первого цикла отслеживания при совпадении адреса и нужной фазы процесса на выходе мультиплексора 17 появляется импульс При этом первый 14 и второй 15 счетчики входят в синхронизм, а регистр 20 сдвига сбрасьшается. Аналогичная ситуация возникает и в процессе, обработки аварийного прерьшания, когда состояние первого 14 и второго 15 счетчиков произвольно, а выход второго разряда регистра 20 сдвига активирован.
Таким образом, устройство осуществляет эффективное управление роботом с самоконтролем основных своих функций.
Применение устройства обеспечивает значительно более надежное функционирование робота, так как в случае сбоя программного счетчика или искажения уставок устройство осуществляет восстановление процесса управления роботом путем исполнения специального программного блока ВОССТАНОВИТЬ УСТАВКУ. Кроме того, устройство защищено от отказов микро- ЭВМ 1, являющейся центральным элементом систеюл. В случае отказа послед
s
0
5
/ней устройство обеспечивает экстренный останов робота за счет обнуления управляющих сигналов, поступающих на приводы робота и вызывающих его перемещения .
Формула изобретенияУстройство для управления роботом, содержащее микроЭВМ, адресные выходы и вьшоды данных которой соединены соответственно с адресной шиной и шиной данных устройства, первый дешифратор, входы которого подключены к адресной шине устройства, а выходы - к шине управления устройства, первый запоминающий блок, первую и вторую группы шинных формирователей и группу регистров, выходы которых являются выходами устройства, а разрешающие входы и разрешающие входы первой и второй групп шинных формирователей подключены к шине управления устройства, причем выходы первой и второй групп шинных формирователей, вьюоды первого запоминающего блока и информационные входы группы регистров соединены с шиной данных- устройства, информационные входы первой группы шинных формирователей являются информационными входами устройства, а информационнее входы второй группы шинных формирователей - входами переключения устройствг, о т- личающееся тем, что, с целью повьш1ения надежности устройства, в него введены второй и третий дешифраторы и три запоминающих блока, последовательно соединенные первый и второй счетчики, мультиплексор, компаратор и последовательно соединенные генератор импульсов, элемент И и регистр сдвига, первый выход которого соединен с входом прерьшания микроЭВМ, второй выход - С вторым инверсным входом элемента И и входами сброса регистров ;группы, вход сброса регистра сдвига объединен со счетным входом первого счетчика и подключен к выходу мультиплексора, управляющий вход которого соединен с выходом компаратора, а адресные входы - с разрядными выходами первого счетчика, первые входы компаратора подключены к адресной шине уст- 5 ройства, вторые входы - к разрядным выходам второго счетчика, первый дешифратор управляющим входом соединен с выходом чтения микроЭВМ, первым
0
5
0
5
0
II
выходом - с входом чтения первого запоминающего блока, вторым выходом с входом чтения второго запоминающег блока и с первым информационным входом мультиплексора, третьим выходом с входом чтения TpeTbeiro запоминаю - щего блока и вторым информационным входом мультиплексора, четвертый выход второго дешифратора подключен к третьему управляющему входу мультиплексора и к управляющим -входам первой и второй групп шинных формирователей, третий дешифратор управляющим входом соединен с выходом записи
2807412
микроэвм, первь1м, вторым и третьим выходами - с входами записи соответственно первого, второго и третьего запоминающих блоков, четвертый выход 5 третьего дешифратора подключен к четвертому входу мультиплексора и ;к синх- ронизируюпцт входам группы регистров, причем адресные входы второго и третьего дешифраторов и первого, второго 10 и третьего запоминающих блоков подключены к адресной шине устройства, а вьшоды второго и третьего запоминающих блоков соединены с шиной данных Устройства.
Ф
-5
iBr«Л
-Зн
fput.j
f.
npepbiSaHUf
Нет(11оспроиз9едение)
Составитель Ю. Апарин Редактор К. Волощук Техред И.Попович KopipeKTop А. Зимокосов
Заказ 2286/48 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4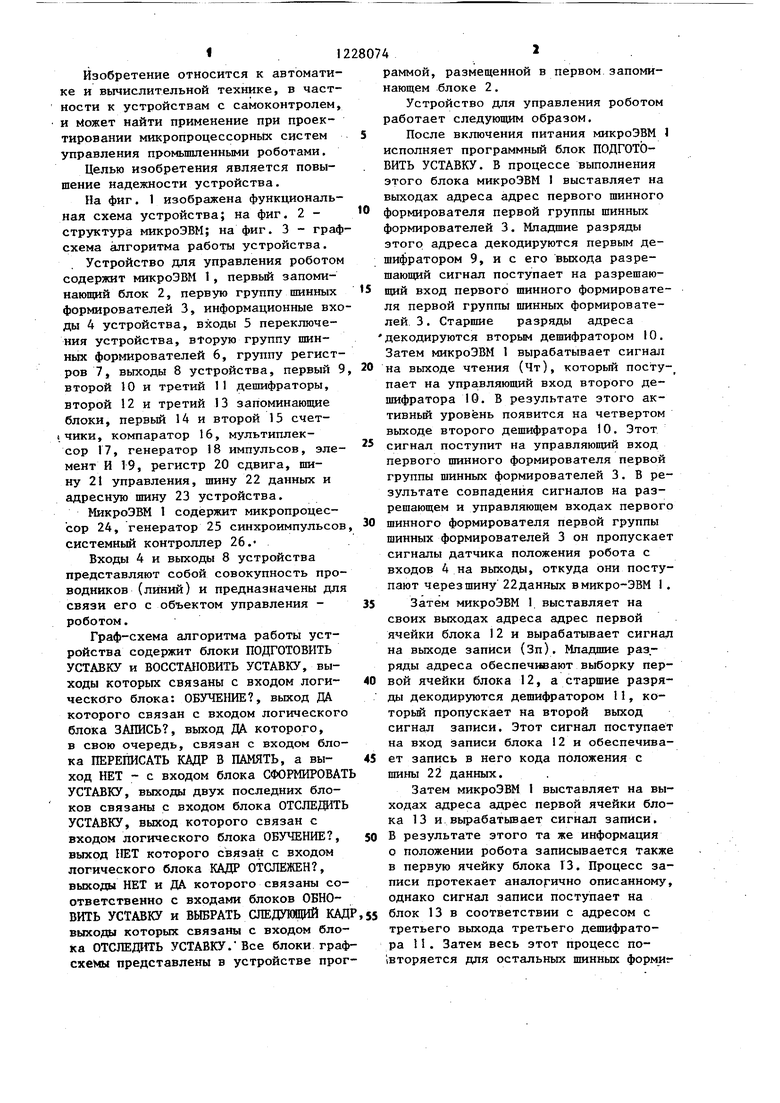

| название | год | авторы | номер документа |
|---|---|---|---|
| Распределенная система управления | 1989 |
|
SU1732345A1 |
| ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО ИЗОБРАЖЕНИЙ | 1990 |
|
RU2047921C1 |
| Устройство для считывания и отображения видеоинформации | 1988 |
|
SU1817116A1 |
| Устройство для сопряжения электронно-вычислительной машины с группой внешних устройств | 1989 |
|
SU1734098A1 |
| Устройство для отладки микроЭВМ | 1985 |
|
SU1410708A1 |
| Устройство для определения среднеквадратического значения переменного сигнала | 1989 |
|
SU1781686A1 |
| Устройство для отображения графической информации на экране цветного телевизионного индикатора | 1990 |
|
SU1836719A3 |
| Многоканальное устройство для сбора информации | 1988 |
|
SU1605273A1 |
| Станция локальной сети | 1987 |
|
SU1478221A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЯ | 1994 |
|
RU2108623C1 |
Изобретение относится к области автоматики и вычислительной техники, в частности к устройствам с самоконтролем, и может найти применение при проектировании микропроцессорных систем управления промьшшенными роботами. Решается задача повьшения надежности управления роботом восстановления процесса управления роботом при случайных сбоях в устройстве с помощью спеи(иального программного блока, а при отказе микроЭВМ - путем экстренного останова робота за счет обнуления управляющих сигналов. Микро- ЭВМ по программе, привнесенной в первое запоминающее устройство, последовательно опрашивает через первую группу шинных формирователей датчики состояния робота и заносит информацию о положении робота во второй и третий запоминающие блоки. Обучение робота произво-дится с Помощью переключателей, подключенных к входам переключения устройства, опрашиваемых также микроэвм через вторую группу шинных формирователей. Группы уставок для каждого кадра управления роботом по команде от микроЭВМ передаются из второго и третьего запоминающих блоков через группу регистров на выходы устройства, подключенные к роботу. Управление группами шинных формирователей, запоминающими блоками и группой регистров производится с помощью первого, второго и третьего дещифраторов. Контроль правильности работы устройства производится путем контроля временных интервалов между импульсами на выходах дешифраторов, для чего эти импульсы с помощью мультиплексора, управляемого двумя счетчиками и компаратором, последовательно подаются на вход сброса регистра сдвига. Если в результате сбоя временные интервалы увеличиваются, то импульсы сдвига от генератора импульсов приводят к возникновению на выходе регистра сдвига сигнала, подаваемого на вход прерывания микроЭВМ. Если сбой был случайным, то микро- ЭВМ восстанавливает работу устройства. В случае отказа микроЭВМ последующий сдвиг в регистре сдвига приводит к обнулению группы выходных регистров и блокировке с помощью элемента И поступления импульсов на регистр сдвига. 3 ил. (Л ю CXD sl 
| Bertino М., Furxhi M.G., Gold М | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Int | |||
| Conf | |||
| Cybern | |||
| and Soc., Boston, 1980, p | |||
| ПРУЖИННЫЙ МЕХАНИЗМ | 1924 |
|
SU1078A1 |
| Херманн и др | |||
| Управление гфомыш- ленным роботом с помощью микропроцессора | |||
| Способ приготовления связывающего вещества для минеральных наполнителей | 1928 |
|
SU12497A1 |
| М., 1981. | |||
