1
Изобретение относится к автоматизации подъемных машин и может быть использовано на подъемных установках
Цель изобретения - повьтюние надежности работы устройства.
На чертеже изображена блок-схема выбора вел11чины тормозного усилия канатного подъемника.
Устройство содержит датчик 1 пу- .ти, датчик 2 нагрузки, датчик 3 скорости, датч1ге 4 направления движения источник 5 опорного напряжения, блок 6 вычисления периода продольных колебаний каната, на вход которого подается постоянный по величине и знаку сигнал V, М, блок 7 определения кратности времени торможения подъемной машины периоду продольных колебаний каната, блок 8 определения величины и направления действия нагрузки, блок 9 формирования величины тормозного усилия и испол- нительный элемент 10 тормоза,
Блок 6 вычисления периода продольных колебаний каната состоит из инверторов 1.1, 12, 13, 14 и 15, блока 16 перемножения, на входы которого подаются сигналы с датчиков 1 и 2, сумматора 17, входы которого соединены с источником 5 и датчиком 2,, блока 18, входы которого скоммути- рованы с выходами блока 16 перемножения и сумматора, блока 19 нелинейности, вход которого скоммутиро- ван с выходом блока 18, и блока 20, умножения на постоянный коэффициент.
Блок 7 определения кратности времени торможения подъемной машины тормозу продольных колебаний каната состоит из инверторов 21 и 22 блока 23 умножения на постоянный коэффициент., на вход которого подается сигнал с датчика 3, и блока 24 деления входы которого скоммутированы с. выходами блока 6, и блока 23 умножения на постоянный коэффициент. Блок .8 определения величины и направления действия нагрузки состоит из инверторов 25 и 26, блока 27 умножения на постоянный коэффициент, на выход которого подаётся сигнал с датчика 1 сумматора 28, входы котоВНИИПИ Заказ 2414/19 Тираж 799 Подписное Произв,-иолигр. пр-тие, г. Ужгород, ул. Проектная, 4
8, 2
рого скоммутированы с датчиком 2 и выходом блока 27 умножения на постоянный коэф(11ициент, блока 29 перемножения, входы которого скоммутированы с датчиком 4 и выходом сумматора 28,
Блок 9 формирования величины тормозного усилия состоит из инверторов 30-34, блока 35 перемножения, на входы которого подаются.сигналы с блоков 6 и 7, блока 36 умножения на постоянный коэффициентj на выход которого подается сигнал с датчика 3, блока 37, входы которого скоммути- рованы с выходами блока 35 перемножения, и блока 36 умножен-ия на постоянный коэффициент, сумматора 38, входы которого скоммутированы с выходами блока 8 и блока 37,
Устройство работает следующим образом.
Пропорционально величине приведенной массы подъемной машины в блок 6 подается постоянньй по величине и знаку сигнал с датчика ,
Датчики 1-4 начинают выдавать сигналы с момента начала движения подтэемноймашины. Датчики 1 и 2 выдают сигналы в Олоки 7 и 8, датчик 3 - в блоки 7 и 9, датчик 4 - в блок 8, По сигналам с датчиков 1, 2 и источника 5 в блоке 6 вычисляет ся период. продольных колебаний каната. Одновременно с этим по сигналам с
датчиков 1, 2 и 4 в блоке 8 опре
деляется величина и знак нагрузки на подъемную машину, Вьпсодные сигналы с блоков 6 и 8 подаются в блок 9, кроме того., выходной сигнал с блока б подается в блок 7, По сигналам с датчиков 3 и блока 6 в блоке 7 определяется кратность времени остановки подъемной машины периоду продольных колебаний каната. Выходной сигнал блока 7 подается в блок 9. По сигналам датчика 3 и блоков 6-8 в блоке 9 формируется величина тормозного усилия, Выходной сигнал блока 9 подается в тормозное устройство iO, которое прикладьшает к подъемной машине тормозное усилие в соответствии с величиной выходного сигнала блока 9.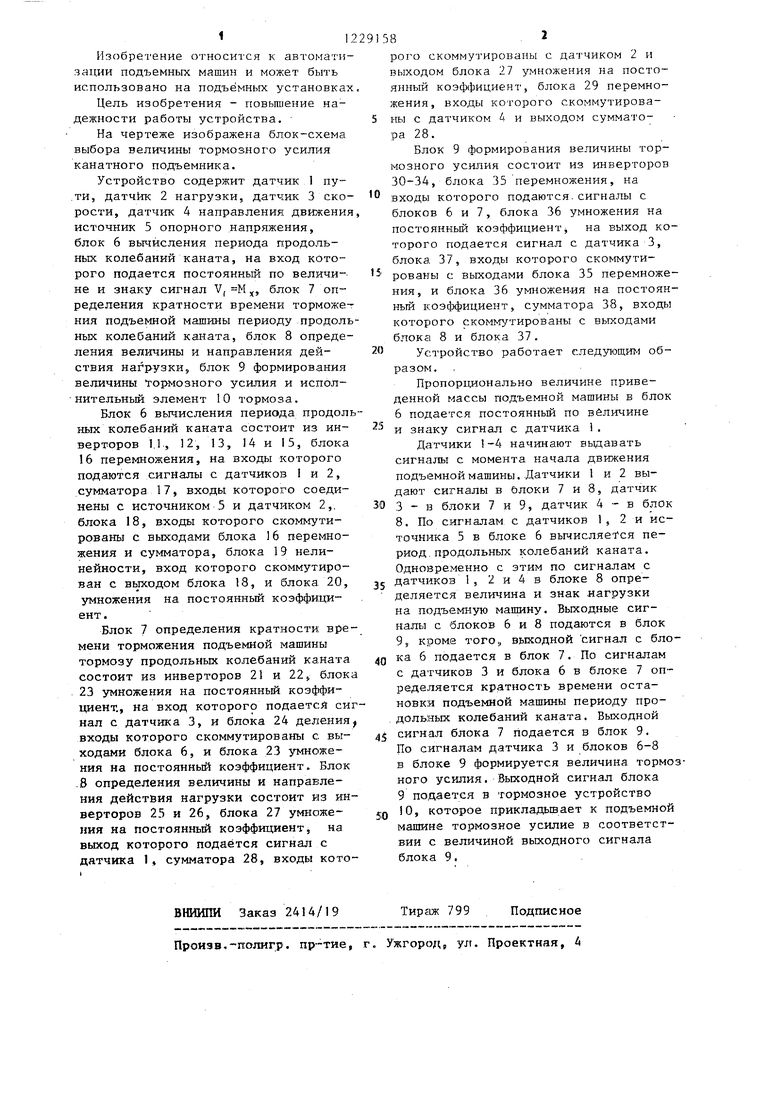
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования тормозного усилия канатного подъемника | 1985 |
|
SU1416426A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ТОРМОЖЕНИЕМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1992 |
|
RU2041152C1 |
| Способ предохранительного торможения подъемной машины | 1983 |
|
SU1346552A1 |
| Устройство для контроля толщины корочки слитка на выходе из кристаллизатора | 1981 |
|
SU1006049A1 |
| Устройство для управления приводом передвижения тележки с гибкой подвеской груза | 1986 |
|
SU1418277A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство для моделирования момента сопротивления поршневого двухцилиндрового насоса двойного действия | 1980 |
|
SU964664A1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |

| Устройство для выбора тормозных режимов подъемной машины | 1976 |
|
SU605777A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
