Изобретение относится к системам управления тормозными устройствами подъемных машин и может быть использовано на подъемных установках предприятий горно-добывающей промышпен- ности.
Цель изобретения - повьшение безопасности эксплуатации подъемных установок.
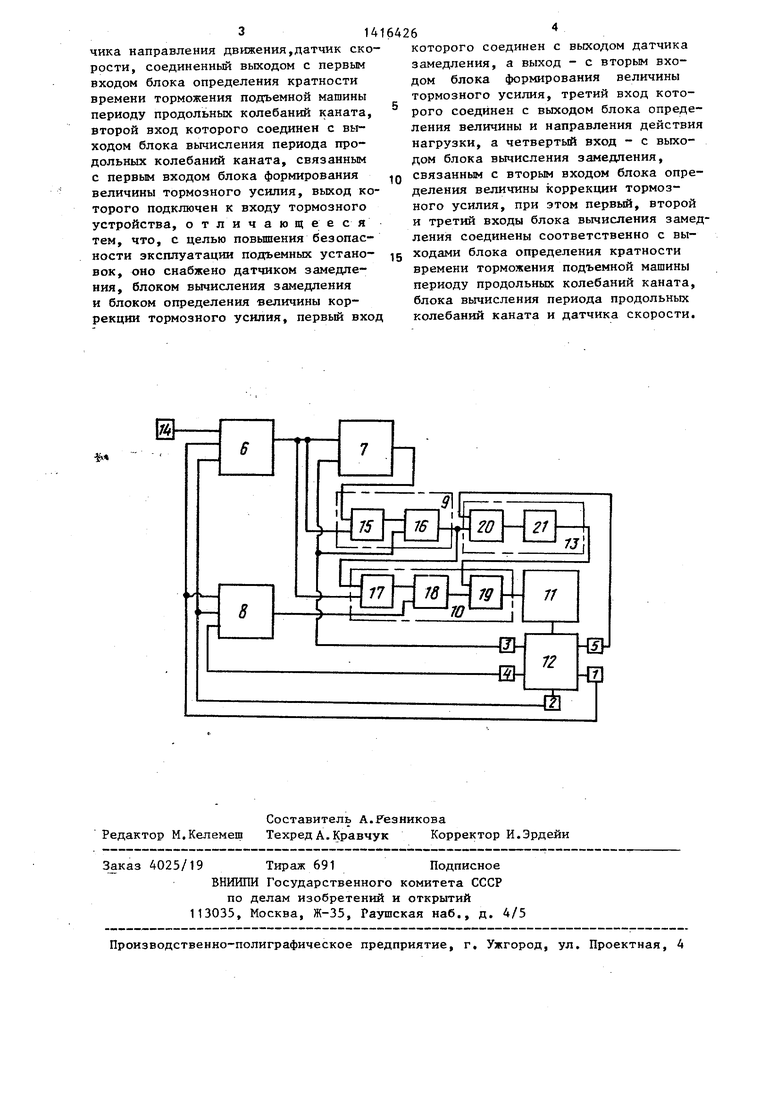
На чертеже представлена функциональная блок-схема предложенного устройства.
Устройство содержит датчик 1 пути датчик 2 нагрузки, датчик 3 скорости, датчик 4 направления движения, датчик 5 замедления, блок 6 вычисления периода продольных колебаний каната, блок 7 определения кратности времени торможения подъемной машины периоду продольных колебаний каната, блок 8 определения величины и направления действия нагрузки, блок 9 вычисления замедления, блок 10 формирования величины тормозного усилия, тормозное устройство 11 подъемной машины 12 и блок 13 определения величины коррекции тормозного усилия, источник 14 опорного напряжения.
Блок 9 вычисления замедления состит из блока 15 перемножения и блока 16 деления.
Блок 10 формирования величины тормозного усилия состоит из блока 1 перемножения и двух сумматоров 18 и 19.
Блок 13. коррекции тормозного усилия состоит из сумматора 20 и блока 21 умножения на постоянный коэффициент.
Устройство работает следующим образом.
Пропорционально величине приведенной массы подъемной машины в блок 6 подается постоянный по величине и знку сигнал с источника 14 опорного напряжения. Датчики 1-5 начинают выдавать сигналы с момента начала движения подъемной машины 12. Датчики 1,2 выдают сигналы в блоки 6 и 8, датчик 3 - в блоки 7 и 9, датчик 4 - в блок 8, датчик 5 - в блок 13. По сигналам с датчиков 1 и 2 в блоке 6 вычисляется период продольных колебаний каната. Одновременно с этим по сигналам с датчиков 1,2 и 4 в блоке определяется величина и знак статической нагрузки на подъемную машину, сигнал об этом подается в блок 10.
0
5
0
5
5
0
5
0
5
0
Выходные сигналы с блока 6 подаются в блоки 7,9 и 10. По сигналам с датчика 3 и блока 6 в блоке 7 определяется кратность времени остановки подъемной машины периоду продольных колебаний каната. Выходной сигнал блока 7 подается в блок 9, По сигналам с датчика 3 и блоков 6, 7 в блоке 9 вычисляется величина расчетного замедления подъемной машины. Выходной сигнал блока 9 поступает в блоки 10 и 13. По сигналам с блоков 6,8 и 9 в блоке 10 формируется расчетная величина тормозного усилия. Выходной сигнал блока 10 поступает в тормозное устройство 11, которое прикладьгоает к подъемной машине 12 тормозное усилие в соответствии с величиной выходного сигнала блока 10. При изменении коэффициента трения действительное замедление подъемной машины будет отличаться от расчетного. По сигналам с датчика 5 и блока 9 в блоке 13 определяется отклонение действительного замедления подъемной машины от расчетного, пропорционально которому в блок 10 подается сигнал, так корректирующий величину тормозного усилия, чтобы действительное замедление подъемной машины стало равным расчетному.
Таким образом, в предложенном устройстве производится выбор и корректировка величины тормозного усилия в зависимости от сигналов датчиков. Величина тормозного усипия выбирается и корректируется так, чтобы подъемная машина остановипась за время, кратное периоду продольных колебаний каната. Это снижает динамические нагрузки в элементах подъемной установки после остановки подъемной машины.
Формула изобретения
Устройство для регулирования тормозного усилия канатного подъемника, содержащее источник опорного напряжения, выход которого соединен с первым входом блока вычисления периода продольных колебаний каната, второй и третий входы которого соединены с выходами датчиков пути и нагрузки, подключенных к первому и второму входам блока определения величины и направления действия нагрузки, третий вход которого соединен с выходом датчика направления движения,датчик скорости, соединенный выходом с первым входом блока определения кратности времени торможения подъемной машины периоду продольных колебаний каната, второй вход которого соединен с выходом блока вычисления периода продольных колебаний каната, связанным с первым входом блока формирования величины тормозного усилия, выход которого подключен к входу тормозного устройства, отличающееся тем, что, с целью повышения безопасности эксплуатации подъемных установок, оно снабжено датчиком замедления, блоком вычисления замедления и блоком определения величины коррекции тормозного усилия, первый вхо
16426
д
10
15
которого соединен с выходом датчика замедления, а выход - с вторым входом блока формирования величины тормозного усилия, третий вход которого соединен с выходом блока определения величины и направления действия нагрузки, а четвертый вход - с выходом блока вычисления замедления, связанным с вторым входом блока определения величины коррекции тормозного усилия, при этом первый, второй и третий входы блока вычисления замедления соединены соответственно с выходами блока определения кратности времени торможения подъемной машины периоду продольных колебаний каната, блока вычисления периода продольных колебаний каната и датчика скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выбора величины тормозного усилия канатного подъемника | 1983 |
|
SU1229158A1 |
| Способ предохранительного торможения подъемной машины | 1983 |
|
SU1346552A1 |
| Устройство для управления тормозными режимами подъемной машины | 1979 |
|
SU781170A1 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| Способ регулирования процесса предохранительного торможения шахтной подъемной машины | 1983 |
|
SU1146269A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ДЛЯ ПРИВОДА ТРОСОВОГО БАРАБАНА ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ И ТРОСОВОЙ СИСТЕМЫ | 1991 |
|
RU2072315C1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Способ определения тормозного усилия подъемной установки | 1987 |
|
SU1518261A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309112C1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
Изобретение относится к системам управления тормозными устройствами подъемных машин, может выбть использовано на подъемных установках предприятий горно-добьшающей промьшленности и позволяет повысить безопасность эксплуатации подъемных установок за счет проведения выбора и коррекции величины тормозного усилия в зависимости от сигналов датчиков пути, нагрузки, скорости, направления движения и замедления соответственно в блоках вычисления периода продольных колебаний каната, определения кратности времени торможения подъемной машины периоду продольных колебаний каната, определения величины и направления действия нагрузки и формирования величины тормозного усилия и блоках вычисления замедления и определения величины коррекции тормозного усилия. После этого управляющий сигнал отрабатывается на тормозном устройстве. 1 ил. (О СЛ
| Устройство для выбора величины тормозного усилия канатного подъемника | 1983 |
|
SU1229158A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
