Изобретение относится к подъемно- транспортному оборудованию, а к устройствам для управления электроприводами горизонтального перемещения груза.
Цель изобретения - повышение точности управления.
На чертеже представлена функциональная схема устройства.
Устройство для управления электроприводом горизонтального перемещения груза содержит задатчик 1 импульса управления, подключенный к входу консервативного звена 2, выход которого через усилитель 3 связан с одним входом сумматора 4, выход которого через интегратор 5 соединен с управляющим входом электропривода 6 горизонтального перемещения груза. Выход звена 2 также соединен через последовательно включенные дифференциальные звенья 7 и 8 с одним входом блока 9 перемноже- рия сигналов, выход которого подсоединен к второму входу сумматора А. Датчик 10 длины грузового каната подключен к второму входу блока 9. Вход дифференциального звена 11 соединен с датчиком 10. Входы блока 12 перемножения сигналов соединены с выхода- ми звеньев 7 и 11, а выход - через усилитель 13 подключен к третьему входу сумматора 4.
Устройство работает следующим образом.
Движение груза на гибком подвесе удовлетворяет уравнению
, „dl dg . dv
idt rtdt dt
где 1 - длина грузового каната;
су - угол отклонения грузового каната;
V - скорость электропривода горизонтального перемещения;
g - ускорение свободного падения;
t - время. При разгоне электропривода 6 задатчик 1 выдает сигнал, амплитуда которого соответствует среднему ускорению, а длительность - времени разгона. Формирование левой части ука- занного уравнения заключается в суммировании отдельных его слагаемых с помощью сумматора 4. Первое слагаемое получается после двойного дифференцирования с помощью звеньев 7 и 8
0
5
Q
5 Q
0
5
0
5
сигнала (f с выхода консервативного. звена 2 и умножения на величину сигнала датчика 10 длины грузового каната с помощью блока 9. Второе слагаемое получается с помощью блока 12 перемножения. Коэффициент усиления усилителя 13 равен двум. Сигнал со звена 2 поступает на усилитель 3 с коэффициентом усиления, равным 9,81, и является третьим слагаемым. Для получения сигнала задания по скорости служит интегратор 5, сигнал которого управляет скоростью электропривода 6 при его разгоне. Аналогично устройства работает и при торможении электропривода.
Устройство позволяет в конце разгона (торможения) обеспечить движение груза без колебаний, независимо от скорости вертикального перемещения груза при совмещении движений груза в горизонтальном и вертикальном направлениях.
Формула изобретения
Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза, содержащее консервативное звено, вход которого соединен с выходом задатчика импульса управления, а выход - с одним входом сумматора, выход которого связан с управляющим входом электропривода, блок перемножения сигналов, один вход которого соединен с выходом дифференцирующего звена, а выход подключен к второму входу сумматора, отличающееся тем, что, с целью повышения точности, оно снабжено датчиком длины грузового каната, подключенным к другому входу блока перемножения сигналов, интегратором, посредстврм которого выход сумматора связан с управляющим входом электропривода, дополнительными дифференцирующими звеньями, вход одного из которых соединен с выходом консервативного звена, а выход - с входом первого дифференцирующего звена, вход другого - с датчиком длины грузового каната, и дополнительным блоком перемножения сигналов, входы которого подключены к выходам дополнительных дифференцирующих звеньев, а выход - к третьему входу сумматора..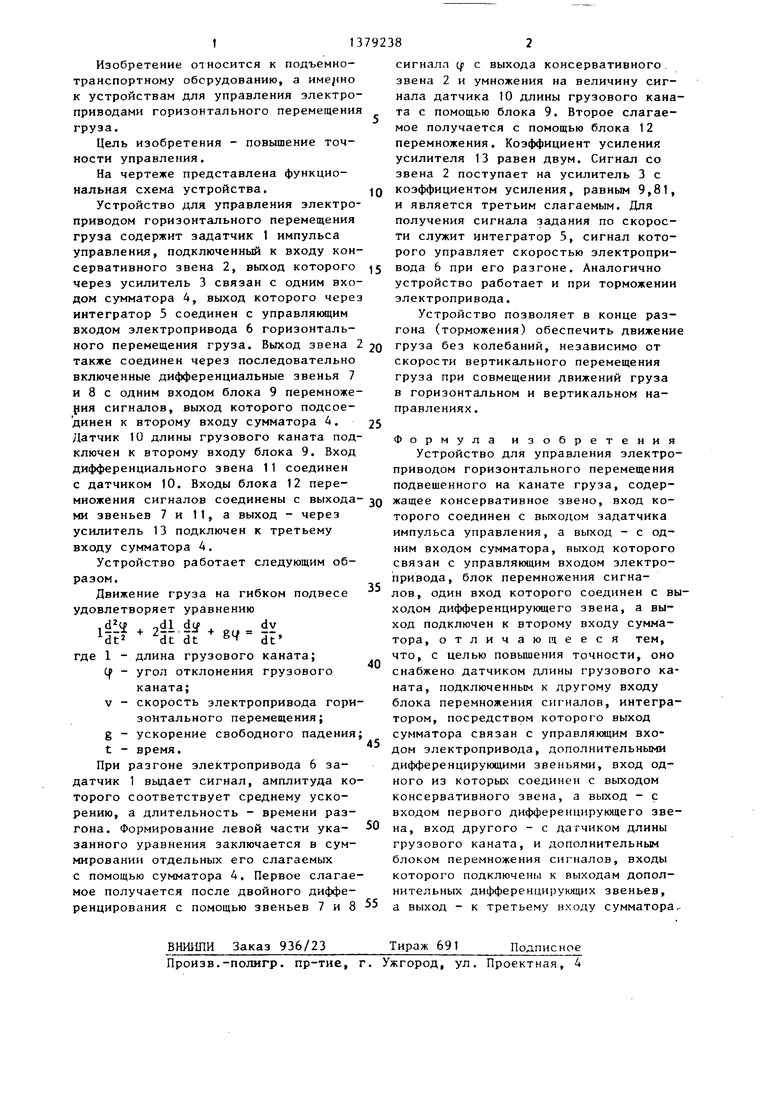
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Устройство для управления электроприводом механизма горизонтального перемещения подвешенного на канате груза | 1988 |
|
SU1527134A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на гибком подвесе груза | 1989 |
|
SU1645237A2 |
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Устройство для управления электродвигателем механизма перемещения груза на гибком подвесе | 1990 |
|
SU1799843A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
Изобретение относится к области подъемно-транспортного оборудования, а именно к устройствам для управления электроприводами горизонтального перемещения грузов. Цель изобретения - повьшение точности управления. Задатчик 1 связан с сумматором 4 через дифференцирующие звенья 7, 8 и блок 9 перемножения, а также через усилитель 3. Датчик 10 длины грузового каната связан с блоком 9 и дифференцирующим звеном 11. Блок 12 перемножения сигналов связан со звеньями 7, 11 и подключен к сумматору 4. Сумматор 4 через интегратор 3 соединен с управляющим входом электропривода 6 горизонтального перемещения груза. При разгоне электропривода 6 задат- чик 1 формирует сигнал прямоугольной формы, при этом на выходе интегратора 5 сигнал является заданием скорости электропривода- 6, и в конце разгона колебания груза отсутствуют. 1 ил. (Л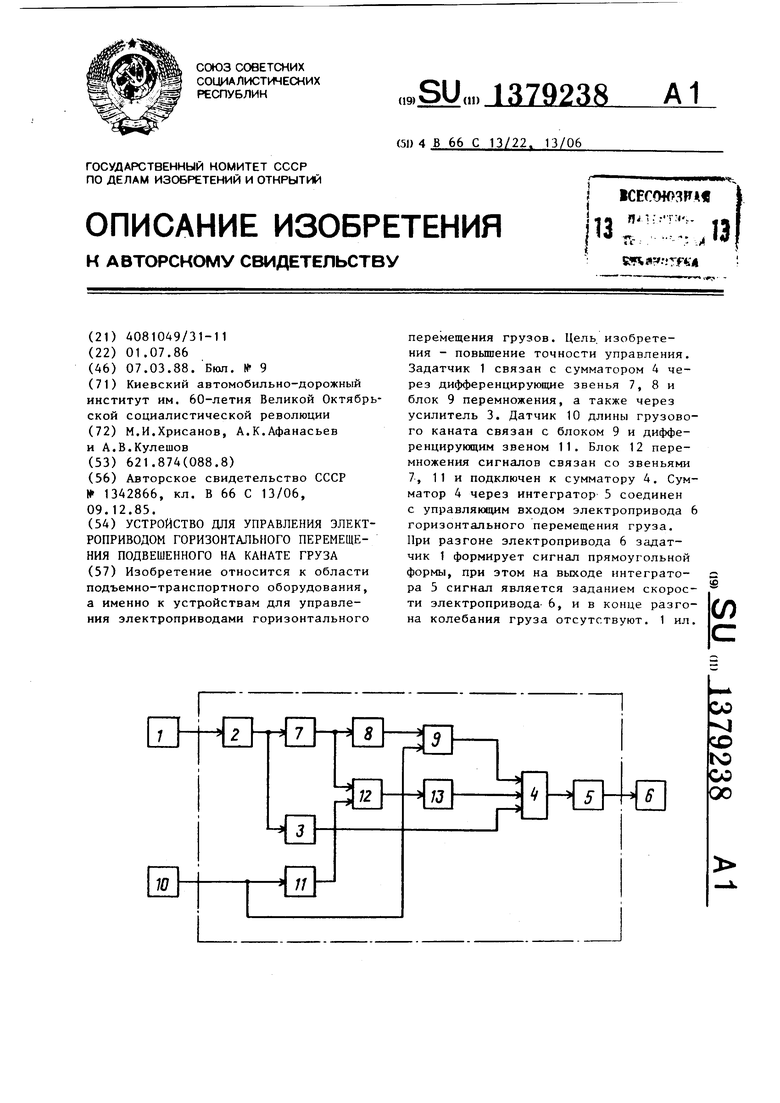
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
