1
Изобретение относится к области подъемно-транспортных машин и может быть использовано в качестве способа предохранительного торможения подъемных устройств.
Целью изобретения является уменьшение динамических усилий в канате после остановки подъемной машины и предотвращение набегания сосуда на канато
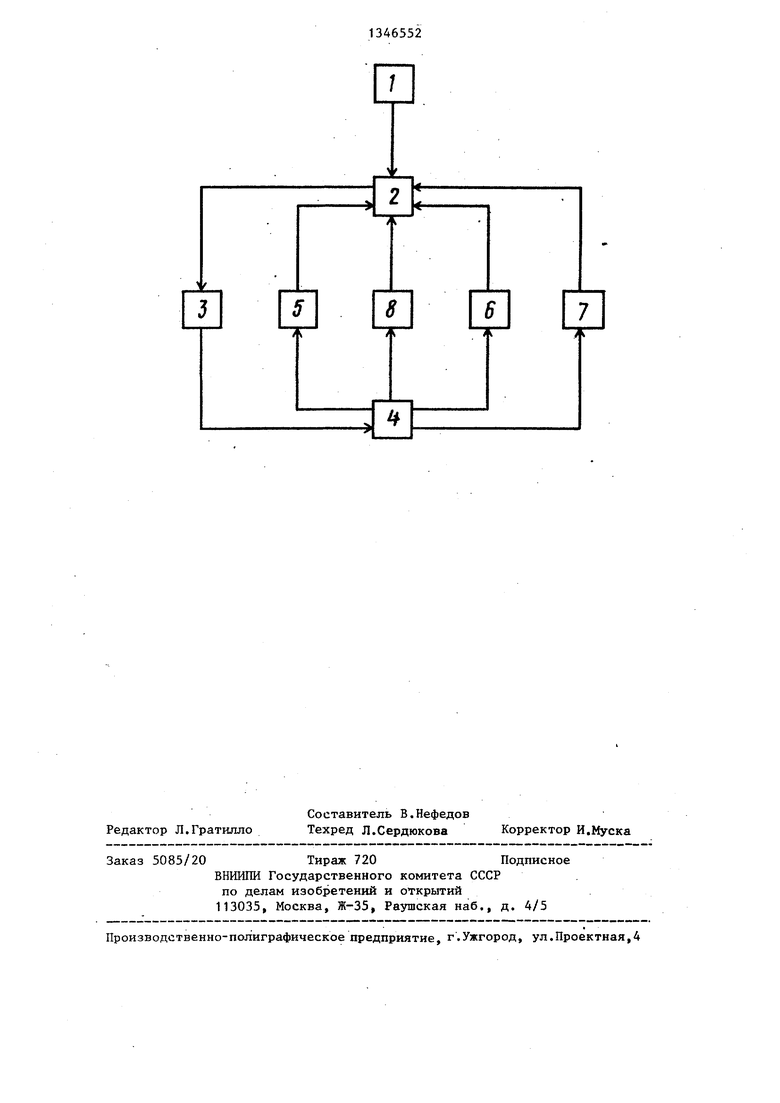
На чертеже представлена функциональная схема устройства для управления торможением, реализующая предлагаемый способе
Устройство содержит цепь 1 управления, подключенную к одному из входов устройства 2 торможения, выход которого соединен через тормоз 3 с подъемной машиной 4, выходы которой подключены соответственно через дат
чик 5 местоположения, датчик 6 скорости, датчик 7 загрузки и датчик 8 направления движения подъемного cor суда к другим входам устройства 2 тор- можения.
Торможение и остановка подъемной машиЬы осуществляются тормозом, развивающим усилие F
V-m nvT
;-+F
30
ст
Т га
±FOTn
где V - скорость подъемной машины на момент торможения, M/CJ период колебаний каната, cj приведенная к органу навивки масса подъемного устройства, кг
статическая разность усилий в канате соответственно для спуска и подъема сосуда, Н; кратность времени остановки подъемной машины периоду продольных колебаний каната. Тормозное усилие F прикладывается к подъемной машине одной ступенью и величина его постоянна в процессе торможения,
Работа подъемной установки при торможении без учета диссипации энергии описывается системой дифференциальных уравнений
+ c(x-x)-F, - с(х-у)0,
.(2)
где х,у - текущие значения линейных перемещений органов навивки и сосуда, м.
га га.
)f
эквивалентные массы, сосредоточенные на окружности органа навивки и в центре сосуда, кг; с - жесткость ветви каната,
H/Mi
F - тормозное усилие, Hj, t - время, с.
При ступенчатом законе приложения тормозного усилия F решение системы уравнений относительно замедления сосуда у следующее. Преобразуем (2), предварительно
обозначив - у,
с(т + m-j) F
ID
Ш.
mv
(3)
Уравнение (3) является линейным однородным второй степени, его решение
-d 4 + 4 Общее решение определяется по виду корней характеристического уравнения
,2 ,
Ы 0,
де w
i
c(mx + m,.)
Шу- m
(4)
- частота колебаний каната.
1 Y i V
c- V (5) Корни характеристического уравне
НИН
ныв
R
J. V
1.а поэтому
мнимые и сопряжен40
А с sin ( + . Частное решение определяем по виду правой
Л А. Подставив
в
(3), получаем
m,
откуда А -
.
т
m у +
fflv
Тогда
,
л + и .n(} t + с,., COS tot 65
тпу + т„
Ш j
Значения с и с находим из начальных условий t л л 0
4 со-о + c cosuj-O F
m +
m
m-j с
Л w cos uj 0 Отсюда
C2
m у +
га.,
Шу С
CjtV S
.
.0
fn w-O.
Л
Окончательно F
m + mv
ms -- cos w t m + m,.
ТПу
с
Шу
fi
У
m ., + го
У
Подставимj
- F m V + ni
(cosco t - 1).
13465524
Колебания сосуда на канате и подъемной машине происходит в противофа- зе относительно некоторой промежуточной точки, движение которой совпадает с вынужденным определяемым значением замедления а. Амплитуда колебаний каната без учета затухающего характера колебаний равна, величине за- IQ медления а. Остановку подъемной ма с, и.шины можно рассматривать как мгновенное ступенчатое снятие ранее наложенного тормозного усилия F. В этом случае происходит суммирование колеба- 15 НИИ от остановки подъемной машины с
колебаниями от наложенного ранее тор- мозного усилия F и амплитуда колебаний каната после остановки подъемной машины определяется суммарной ампли- Из второго уравнения системы (2) 20 тудой, а величина ее зависит от положения сосуда относительно промежуточ-2 ной точки в момент остановки.
™vjМинимум динамических усилий в канате после остановки подъемной маши- 25 ны может быть достигнут в случае, ко- ргда остановка ее произошла при минимальном значении замедления сосуда в момент остановки. Точки минимального значения замедления повторяются с частотой (д) собственных колебаний каната, поэтому минимум динамических усилий в канате достигается при остановке подъемной машины за время, кратное целому числу периодов собственных колебаний каната, так как
(10)
то время остановки подъемной машины
(cos Cot - 1) )t-1) ,
ni
(6)
где ш - Шу + Шу.
Из первого уравнения системы (2)
-F - с(х - у) -F - ту ,-. X V 30
m,
m.
Полученные решения (6) и (7) показывают, что при приложении ступенью тормозного усилия возникающий процесс носит колебательный характер; пропорционально замедлению сосуда
канате, так как максимальные по модулю замед35
формируются усилия в
у Л
40
t пТ;
(11)
сосуда равны 2 -
m
при
U)
(где ,2,...), а минимальные - при
2Т .
В этом случае, согласно второму закону Ньютона, подъемная машина движется равнозамедленно и величина замедления определяется как
,(8)
тогда время остановки подъемной машины определяется только соотношением величин замедления а, вызванного тормозным усилием скоростью подъемной машины на момент торможения V
v;
а
ТПу
с
(2)
(6)
30
35
t пТ;
замедление V
П.Т
(11)
а из (9) и (11) получим
(12)
50
Подставив (12) в (8) и разрешив относительно F, получим выражение, необходимое для получения минимума динамических усилий в канатах тормозного усилия.
F
ш-У п-Т
(13)
в канате зависит от массы сосуда и величины замедления а. При большом значении а усилие в канате может снизиться до нуля или .сосуд даже обгонит канат. Двигаясь после этого в обратном направлении с ускорением свободного падения, сосуд выбирает образовавшуюся петлю, что ведет к сильным динамическим нагрузкам на канат. Кратность п времени остановки подъемной машины периоду собственных колебаний каната определяется из условия ненабегания сосуда на канат. При мгновенном приложении тормозного усилия максимальное значение замедления может достичь значения 2а (6) и (7), поэтому для ликвидации набегания сосуда на канат замедление подъемной машины не должно превьшать значения ускорения свободного падения g, а с учетом наклона ствола g.sinod , т.е.
I 2а1 -i g (14)
или
а I sine/ .
(15)
Подставив выражение (15) в (12), получим выражение для кратности времени остановки подъемной машины периоду собственных колебаний каната
9ХГ
где п ближайшее большее целое число. .
Датчики 5 и 7 предказначены для обеспечения определения периода продольных колебаний каната, а по сигналам с датчиков 5 и 6 определяется величина тормозного момента.
Формула изобретениягде g - ускорение свободного падения,
Способ предохранительного тормо- - угол наклона шахтного ствола, жения подъемной машины, заключающий-- 40 град.
ся в измерении величины загрузки, местоположения, направления движения и скорости подъемных сосудов, опре-- делении периода продольных колебаний каната и задании кратности- времени остановки подъемной машины, равной периоду продольных колебаний каната, отличающийся тем, что,
с целью уменьшения динамических усилий в канате после остановки подъемной машины и предотвращения набегания Сосуда на канат, прикладывают тормозное усилие одной ступенью величиной, равной
К - + F .
0.
где V
Т m
5 +|г
сг
п
0
скорость подъемной машины в момент торможения, м/с период колебаний каната, с приведенная к органу навивки масса подъемного устройства, кг
статическая разность усилий в канате соответственно для спуска и подъема сосуда, Е;
Кратность времени остановки подъемной машины периоду продольных колебаний каната, определяемая из выражения
35
п
2V
Tgsinfl(

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ торможения подъемной машины | 1982 |
|
SU1054284A2 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| Способ определения коэффициента трения между фрикционными элементами тормоза подъемной машины | 1988 |
|
SU1530565A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Устройство для регулирования тормозного усилия канатного подъемника | 1985 |
|
SU1416426A1 |
| Способ управления рабочим торможением шахтной подъемной машины | 1980 |
|
SU931637A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ПРИ КВАЗИЛИНЕЙНОЙ ЗАКОНОМЕРНОСТИ ИХ ИЗМЕНЕНИЯ В ЛЕНТОЧНО-КОЛОДОЧНЫХ ТОРМОЗАХ БУРОВЫХ ЛЕБЕДОК | 2010 |
|
RU2507423C2 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |
| Устройство для управления рабочим торможением подъемной машины | 1980 |
|
SU962169A1 |
| Способ регулирования процесса предохранительного торможения шахтной подъемной машины | 1983 |
|
SU1146269A1 |
Изобретение относится к подъемно-транспортным машинам и может быть использовано в качестве способа предохранительного торможения шахтного лифта. Цель изобретения - уменьшение динамических усилий в канате после остановки подъемной машины и предотвращение набегания сосуда на канат, которая достигается приложением тормозного усилия одной ступенью, вычисляемой по формуле: F V m/n-T+FpT, где V - скорость подъемной машины в момент торможения, м/с m - масса подъемного устройства, приведенная к органу навивки, кг; Т - период колебаний каната, cj 7 - статическая разность усилий в канате соответственно для спуска и подъема сосуда. Hi п 2V/TnSin 0 - кратность времени остановки подъемной машины периоду продольна. колебаний каната; g - ускорение свободного падения, угол наклона шахтного ствола, град. Особенностью данного способа является возможность использования в случае отключения питания подъемной ма-- шины 1 ил. с (Л СА: 4 Oi ел сд ю
Редактор Л.Гратилло
Составитель В.Нефедов Техред Л.Сердюкова
Заказ 5085/20Тираж 720Подписное
ВНИШШ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор И.Муска
| Способ торможения подъемных машин | 1971 |
|
SU716960A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
