Изобретение отноеитея к робототехнике и может быть нс11(х 1ьзова 1О при создании манипуляторов, выполняющих операции е об 1 ектамп, на которые наложены , например 1плпфовапие ноиерхностей с.ложпой формы.
Цель изобретения - pacinnpenne (}) пк- циональных Еюзможноетей устройства путем очувствления рабочего по порма.чь- ному усилию в зоне его требуемого положения.
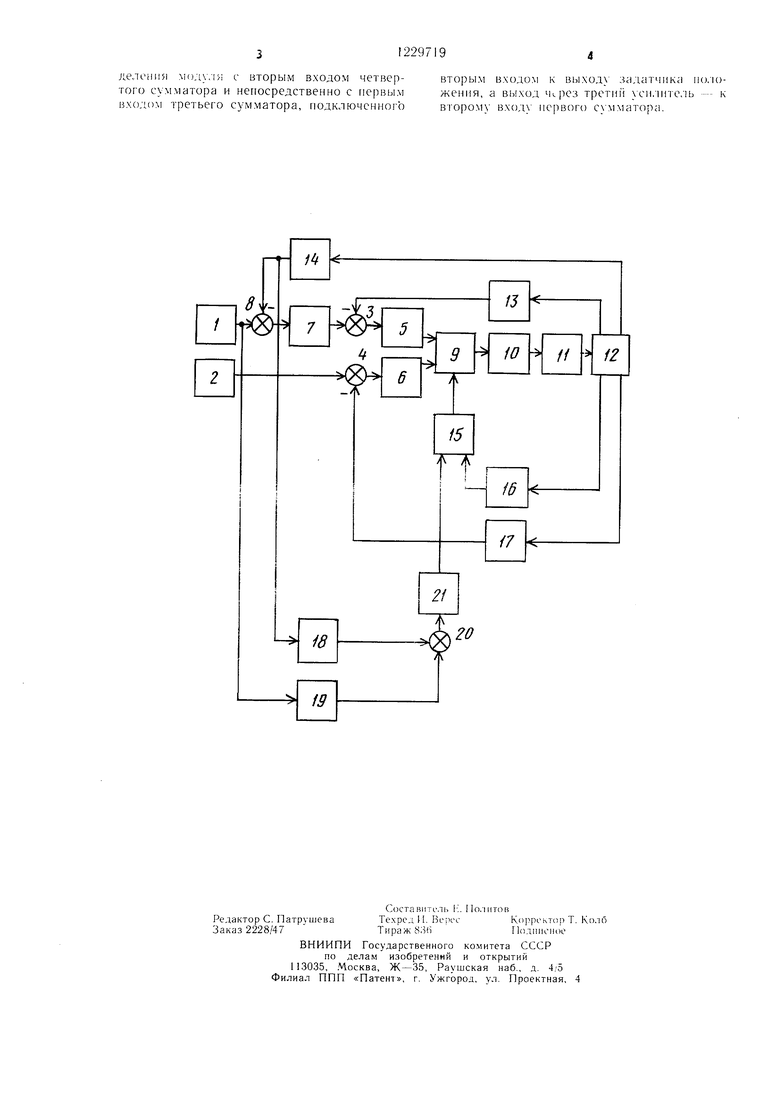
На чертеже представ.пепа функциональная схема устройства.
Схе.ма содержит задатчик 1 положепия, задатчик 2 усилия, иервЕ ж и второй сумматоры 3 и 4, первый, второй и третий усилители 5-7, третий су.мматор 8, коммутатор 9, блок 10 коррекции, привод II, ис- полнительпый механизм 12, датчик 13 скорости, датчик 14 положения, элемент И 15, датчик 16 контакта, датчик 17 усилия, иер- вый и второй блоки 18 и 19 выделения модуля, четвертый сумматор 20, пороговый элемент 21.
Устройство работает следующим образом. С задатчика 1 положения поступает cnrna.i на отработку приводом 1 1 заданного перемещения исполнительного механизма 12. Из этого сигнала вычитается в сумматоре 8 спг - нал датчика 14 положения и подается усиленный усилителем 7 на сумматор 3, где из него вычитается сигиал датчика 13 скорости. Получениый сигна.т через усилитель 5, коммутатор 9 и блок 10 коррекции подается на г1|П1вод 11.
(Сигнал е датчика 16 контакта переключает, проходя через э:1еме;.т И 15, коммутатор 9 с контура управления по положению па контур управления но усилию, если рабочая точка (точка контакта нкчифоваль- пого круга и обрабатываемой заготовкп) является внешней к требуемому контуру. Положение рабочей точки оггределяется следующим образом. Сравниваются требуемое (программное) и действительное значения координат.
Предполагается, что движение схвата манипулятора осуществляется в плоскости прямоугольных координат с центром на неподвижном предмете, при этом не имеет значения находится в схвате щлифовальный круг или деталь. Привод второй координаты является обычным следящим приводом, инвариантным к внешним воз.мущающим воздействиям. В этом случае достаточно определить положение схвата только по первой координате и сравнить с требуемы.м. Оценка осуществляется по функции положения F |Хд| - |Хтр|, где Хтр- требуемое значение координаты; Хд - действительное значение координаты (рабочая точка может находиться в любом из 4 квадратов). Если , то рабочая точка является вненшей к требуемому контуру, если , то рабочая точка является внутренней. Для опреде0
5
0
5
0
5
0
5
0
5
.чення функции F сигнал с датчика 14 положения подается на блок 18 выделения модуля, который сравнивается в сумматоре 20 с сигналом с задатчика 1 по.чожения, преобразованным в блоке 19 выделения .модх ля. Разностный сигнал с сумматора 20. представляющий функцию положения F, поддается на пороговый элемент 21, выходной сигнал которого онределяется выражение.м: если F 0 I О, если F О,
где и - некоторый уровень панряжения, соответствующий уровню входных сигналов элемента И 15.
Таким образо.м, коммутатор 9 переключается сигпалом с элемента И 15 на контур уп|:1авления по усилию только в то.м случае, если имеется контакт с поверхностью (определяется по сигналу датчика 16 контакта) и рабочая точка яв.чяется внещ- пей к программной поверхности (определяется по значению входного сигнала порогового элемента 21), т.е. нмеются сигналы на обоих входах элемента И 15.
Коммутатор 9 переключается при отсутствии С1и-на,1а с э.чемента И 15 на контур управ.ления по ио.южению. если один и.ти оба сигнала на входе э.чемеита И 15 ну.те- вые, т. е. в тех случаях, когда )абочая точ.ка является впут)см1нс11 к трсГ)с Мо) к() или отсутствует контакт с ис верхностью, что соответствует выходу рабочей точки на границу поверхности или иа иаз, окно м т.д.. не подлежащие обработке.
Форм у л а изобр L TeHii:Устройство для управления манипулятором, содержащее последовательно соедппен- пые первый су.мматор, первый силитель, коммутатор. 6;iOK коррекции и Г1)ивод, связанный через иснолнительный механиз.м с датчиком контакта и датчиком скороети, выход которого подключен к первому входу первого сумматора, последовательно соединенные задатчик усилия, второй сум.матор п второй усилитель, подключенньп выходом к второму входу коммутатора, связанный с испо.ппптельным механизмом датчик усилия, выход которого соединен с вторым входом второго су.мматора, отличающееся те.м, что, с це.лью расширения функциональных возможностей путем очувствления рабочего органа по нормальному усилию в зоне его требуемого положения, оно содержит первый блок выделения модуля, третий сумматор, третий усилитель, связанный с исполнительным .механиз.мом датчик но;1ожения и по- след(звательно соединенные задатчик положения, второй блок выделения модуля, четвертый сумматор, пороговый элемент и элемент И, второй вход которого подключен к выходу датчика контакта, а выход - к третьему входу коммутатора, выход датчика юложения соедииен через первый б. юк выделения модхмя с вторым входом четвер- тог о сумматора и непосредственно с первым входом третьего сумматора, подключенного
вторым входом к ВЫХОД} задатчнка но.ю- женпя, а выход третш хсн.штель - к второму ВХОД} первого сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2015 |
|
RU2604555C1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1264137A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1275372A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1290247A1 |
Изобретение относится к робототе.ч- нике и может быть исиользовано при создании манипуляторов, выполняющих онера- HiiH с объектами, на которые наложены внешние связи. В предложенном устройстве за счет введения двух блоков выделения модуля, задатчика и датчика наложения, двух су.мматоров, усилителя, порогового элемента и элемента И обеспечивается pacnin- реиие функциональных возможностей путем очувствлен1 я рабочего органа но нормальному усилию в зоне его требуемого ноло- жения. 1 ил. to го со 
| 3656937/24-24 28.10.83 07.05.86 | |||
| Бюл | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Н | |||
| Егоров и Н | |||
| Г | |||
| Рассказчиков | |||
