С5) УСТРОЙСТВО для УПРАВЛЕНИЯ СБОРОЧНЫМ . МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным манипулятором | 1981 |
|
SU993198A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Устройство для управления сборочным роботом | 1983 |
|
SU1091115A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1229719A1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1264137A1 |
| Устройство для управления сборочным манипулятором | 1987 |
|
SU1495117A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1290247A1 |
| Устройство для управления манипулятором | 1990 |
|
SU1717338A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1421529A1 |
I
Изобретение относится к робототехнике и может быть использовано при создании, сборочных роботов.
Известно устройство для управления манипулятором, содержащее объект регулирования, датчик регулируемого параметра, блок сравнения, регулятор пороговый элемент и коммутатор 1/.
Однако это устройство не предназначено для управления сборочным манипулятором.
Наиболее близким по технической сущности к изобретению является устройство, содержащее последовательно соединенные задатчик скорости, первый сумматор., первый усилитель, коммутатор, блок коррекции и привод, б язанный через исполнительный Механизм с датчиком скорости, выход КОТОРОГОподключен к второму входу первого сумматора 112-J.
Недостатком известного устройства является невозможность регулирования усилия, которое при столкновении
объекта регулирования с неподвижным предметом может достигнуть критического для привода и предмета значения, что совершенно недопустимо при проведений сборочных операций.
Цель изобретения - повышение надежности устройства.
Для достижения указанной цели устройство содержит датчик контакта
10 и датчик усилия исполнительного механизма, а также последовательно соединенные задатчик усилия, второй сумматор и второй усилитель, выход которого подключен к второму входу
15 коммутатора, управляющим входом сое/ иненного с выходом датчика контакта, установленного на исполнительном механизме, а выход датчика усилия исполнительного механизма соеди20нен с вторым входом второго суммато- ра.
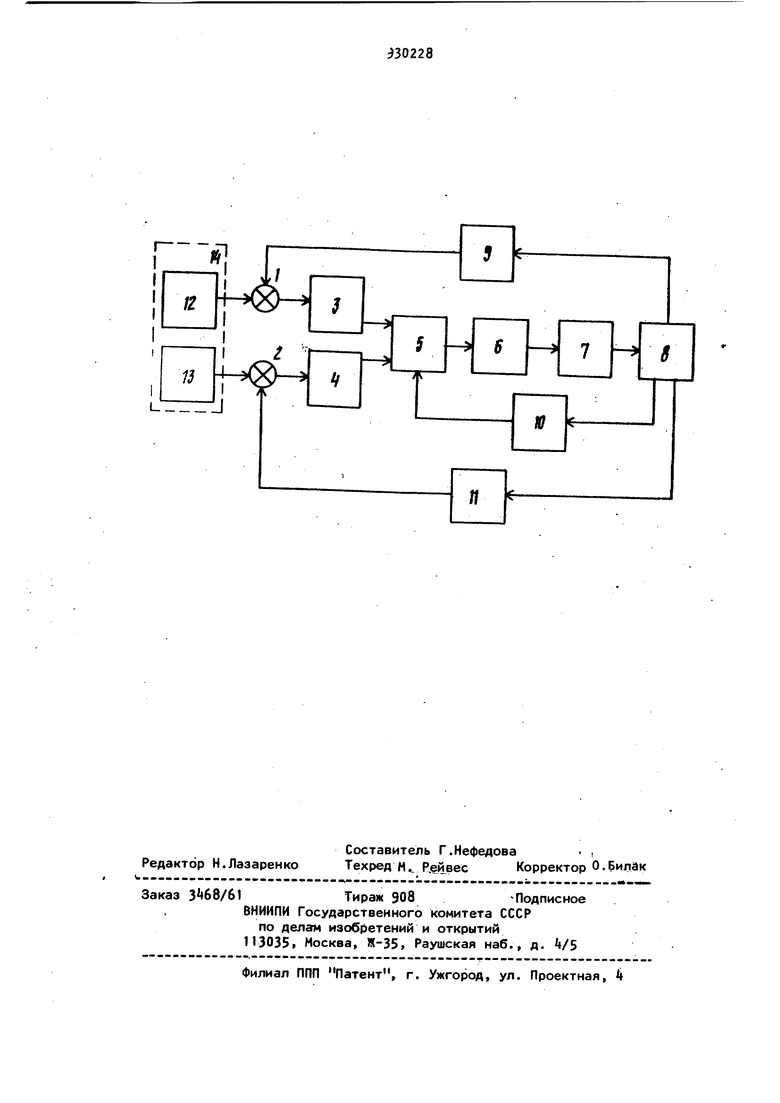
На чертеже дана функциональная схема устройства.
Устройство содержит первый и второй сумматоры 1 и 2, первый и второй усилители У и Ц соответственно, коммутатор 5t блок 6 коррекций, привод 7f исполнительный механизм 8, 5 датчик 9 скорости, датчик 10 контакта, датчик 11 усилия исполнительного механизма, задатчик 12 скорости, задатчик 13 усилия, задающий орган И.10
УСТРОЙСТВО работает следующим образом.
С задатчика 12 скорости поступает сигнал на отработку приводом 7 заданной скорости для исполнительно- is го,механизма 8, содержащего силовой редуктор, схват и т.д. Этот сигнал, вычитая сигнал датчика 9 скорости, поступает через усилитель 3, коммутатор 5 и блок 6 коррекции на привод -ц
с предметом, причем скорость объекта регулирования может меняться по величине. При прекращении контакта привод 7 опять сообщает заданную скорость исполнительному механизму
положение которого соответствует определенной скорости и определенному усили.ю исполнительного механизма 8.
Применение изобретения позволит исключить критические нагрузки в исполнительном механизме и на переносимый предмет и тем самым повысить н дежность устройства.
Формула изобретения
Устройство для управления сборочным манипулятором, содержащее последовательно соединенные задатчик скорости, первый сумматор, первый усилитель, коммутатор, блок коррекции и привод, связанный через исполнительный механизм с датчиком скорости, выход которого подключен к второму входу первого сумматора, отлчающееся тем, что, с целью повьшения надежности, оно содержит датчик контакта и датчик усилия исполнительного механизма, а также последовательно соединенные задатчик усилия, второй сумматор и второй усилитель, выход которого подключен к второму входу коммутатора, управляющим входом соединенного с выходом датчика контакта, установленного на исполнительном механизме, а выход датчика усилия исполнительного |;1еханизма соединен с вторым входом второго сумматора.
Источники информации принятые во внимание при экспертизе
I A W(g)К
7J
I
