to
Од 4
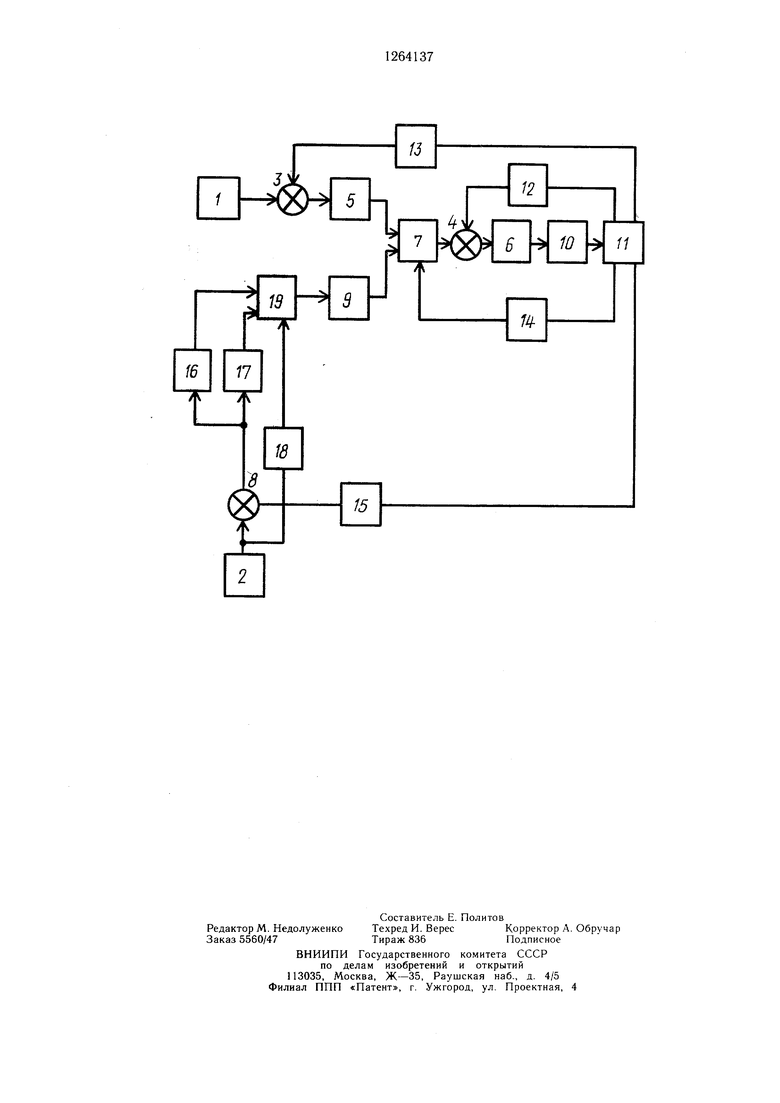
оо Изобретение относится к робототехнике, может быть использовано при создании устройств управления промышленными роботами, выполняющими операции с объектами, на которые наложены внешние связи, например шлифование поверхностей сложной формы. Цель изобретения - повышение надежности работы устройства путем исключения реверсирования привода при возникновении нагрузок, превышаюш,их заданные. На чертеже представлена функциональная схема устройства. Устройство содержит задатчик 1 положения, задатчик 2 усилия, первый и второй сумматоры 3 и 4 соответственно, первый и второй усилители 5 и 6 соответственно, коммутатор 7, сумматор 8, усилитель 9, привод 10, исполнительный механизм 11, датчик 12 скорости, датчик 13 положения, датчик 14 контакта, датчик 15 усилия, первый и второй вентили 16 и 17 соответственно, блок 18 выделения знака, второй коммутатор 19. Устройство работает следующим образом. С задатчика 1 положения поступает сигнал на отработку приводом 10 заданного перемещения исполнительного механизма 11, содержащего силовой необратимый редуктор и схват, в котором может быть закреплена или шлифовальная головка, или обрабатываемая деталь в зависимости от грузоподъемности манипулятора и веса детали. Из этого сигнала в сумматоре 3 вычитается сигнал датчика 13 положения и подается усиленный усилителем 5 на первый вход коммутатора 7, а с его выхода - на вход сумматора 4, где из него вычитается сигнал датчика 12 скорости. Полученный сигнал, усиленный усилителем 6, подается на привод 10 исполнительного механизма 11. Сигнал с датчика 14 контакта переключает в момент контакта шлифовального круга с поверхностью детали коммутатор 7 с контура управления по положению на контур управления по усилию. С данного момента сигнал с задатчика 2 усилия (резания), вычитая сигнал с датчика 15 в сумматоре 8, подается на входь вентилей 16 и 17, а с них - на первый и второй входы второго коммутатора 19. Вентили 16 и 17 имеют различную проводимость {т. е. включены встречно), поэтому коммутатор 19 подключает к входу усилителя 9 тот из них, который имеет проводимость, соответствующуй) знаку сигнала задатчика 2. Осуществляется этом с помощью блока 18. Выходной сигнал блока 18 переключает второй коммутатор 19 на тот из входов, к которому подключен вентиль 16 или 17, соответствующий знаку сигнала с задатчика 2. Например, если сигнал задания положительный, подключается вентиль 16, имеющий проводимость в направлении от выхода сумматора 8 к входу коммутатора 19, если сигнал задания отрицательный (предполагается, что сигнал задания силы резания может изменяться, что имеет место при контурной обработке деталей), подключается вентиль 17, имеющий проводимость в направлении от входа коммутатора 19 к выходу сумматора 8. Формула изобретения Устройство для управления промышленным роботом, содержащее последовательно соединенные задатчик положения, первый сумматор, первый усилитель, первый коммутатор, второй сумматор, второй усилитель и привод, связанный с исполнительным механизмом, с которым кинематически связаны датчик положения, датчик скорости, датчик контакта и датчик усилия, выход которого подключен к первому входу третьего сумматора, соединенного вторым входом с выходом задатчика усилия, третий усилитель, выход которого подключен к второму входу первого коммутатора, соединенного третьим входом с выходом датчика контакта, выход1|Датчика скорости подключен к второму вхЬду второго сумматора, а выход датчика положения соединен с вторым входом первого сумматора, отличающееся тем, что, с целью повышения надежности устройства, оно содержит два встречно включенных вентиля и последовательно соединенные блок выделения знака и второй коммутатор, выход которого подключен к входу третьего усилителя, а второй и третий входы - к выходам первого и второго вентилей соответственно, подключенных входами к выходу третьего сумматора, а вход блока выделения знака соединен с выходом задатчика усилия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным роботом | 1983 |
|
SU1091115A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1290247A1 |
| Устройство для управления манипулятором | 1990 |
|
SU1717338A1 |
| Устройство для управления сборочным манипулятором | 1981 |
|
SU993198A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1421529A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1229719A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2000 |
|
RU2189306C2 |
Изобретение относится к области робототехники и может быть использовано при создании устройств для управления промышленными роботами, выполняющими операции с объектами, на которые положены внешние связи, например при выполнении операции шлифования. Цель изобретения - повышение надежности работы устройства. В изобретении в режиме управления по усилию за счет введения вентилей, блока выделения знака и коммутатора обеспечивается подача на привод сигналов рассогласования, совпадаюших по знаку с сигналом задатчика усилия. Указанное исключает реверсирование привода при возникновении нагрузок больше с заданных и переключение устройства на режим управления по положению. 1 Ил. (Л
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1229719A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
